
一种具有除反馈和除前馈的负反馈控制系统
2014-07-09 05:19:24马澍田马新明
导航定位与授时 2014年1期
马澍田,马新明,史 震
(1.哈尔滨工程大学自动控制学院,哈尔滨黑龙江 15001;2.北京自动化控制设备研究所,北京 100074)
0 引言
自动控制系统就是负反馈控制系统,自动控制理论也是负反馈控制理论,实质是利用输入量减去反馈量所得的偏差对系统的被控量进行控制。系统的性能受系统稳定性的限制,很难达到人们的期望值,多年来人们针对系统偏差量相继研究出多种控制规律,来提高偏差量对系统的控制能力,达到提高系统的某个或某些性能指标的目的。例如PID控制、变结构控制、模糊控制和最优控制等。上述控制方法不能全面的成倍的提升系统的性能指标。甚至还造成系统的个别性能指标变坏或工程上不易实现的问题。
在上述控制方法中,分别加入除反馈和除前馈两个环节后,不但不改变原系统的稳定性,而且还能将系统的所有的动态指标和稳态指标提高到原系统的3倍。
1 控制系统数学模型
设系统的输入量为γ(t),其绝对值为γ1=γ(t) ,反馈为|b(t)|,其绝对值为b1= | b(t) | 。将除式γ1/b1作为输入支路的一个环节,称为除反馈,将除式b1/γ1作为反馈支路的一个环节,称为除前馈。具有除反馈和除前馈的负反馈控制系统的一般形式如图1所示[1]。
e,c——分别为系统的偏差,输出量;
u,f——分别为除反馈,除前馈环节的输出量;
Gc(z)——计算装置的脉冲传递函数;
Kϖ——功率放大器的放大系数;
Gδ(s)——舵系统的传递函数;
Gd(s)——被控对象的传递函数;
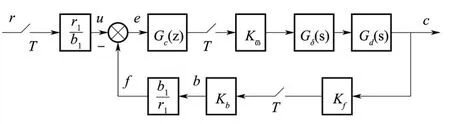
图1 具有除反馈和除前馈的负反馈控制系统的结构图Fig.1 The structure diagram of negative feedback control system with the function of division feedback and division former feedback
Kf、Kb——分别为反馈测元件的传递系数,反馈调节系数;
T——采样器的采样周期。
若采样周期T等于或小于控制系统中各环节的最大时间常数的1/10,就可将数字控制系统按其对应的连续模拟控制系统进行分析设计,见图1。相对应的连续模拟控制系统的结构如图2所示[2]。
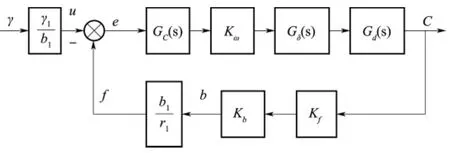
图2 与图1相对应的连续模拟控制系统的结构图Fig.2 The structure diagram of control system of continuous simulation corresponding Fig.1
下面以图2所示系统为例,对系统作简要说明分析。
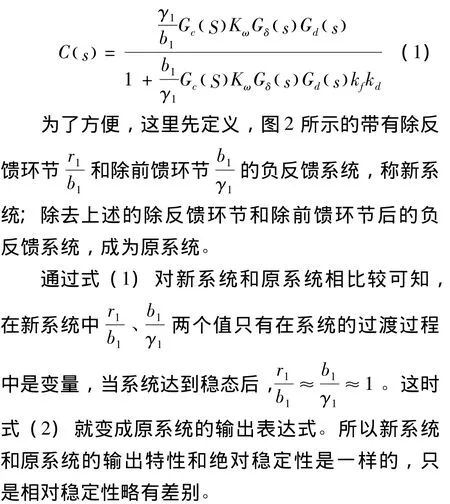
2 系统的输出特性
图2所示系统的输出为:
3 系统的动态性能
通过新系统中的除反馈和除前馈两个环节的作用,使系统的偏差量是原系统的3倍多,尤其是在系统的过渡过程阶段,新系统的偏差更大。所以致使新系统在过渡过程中的上升时间和调节时间是原系统的三分之一还短。若系统是有超调的,则新系统的超调量略大,但超调量振荡次数不变。新系统的上升时间和调节时间比原系统的三分之一还短,是新系统的第一特点。对新系统的相关特性进行了数学仿真。仿真对象为一典型二阶系统,如图3所示。输入幅值为10的阶跃信号。
系统带宽为1.0 Hz左右,阻尼比为1.0。负反馈作用下,系统响应调节时间在0.8 s以上;除反馈作用下,系统响应调节时间在0.35 s左右。具体见图3、图4。
4 对新、原控制系统的控制能力的对比分析
控制系统的控制能力表现在两个方面:第一是系统的输入量对其输出量的控制能力;第二是系统的反馈量抵抗系统前向通道中的外干扰和参数变化对其输出量影响能力。总之,系统的控制能力,就是在保证系统稳定性的前提下,系统的输入量和反馈量产生偏差量大小的能力。
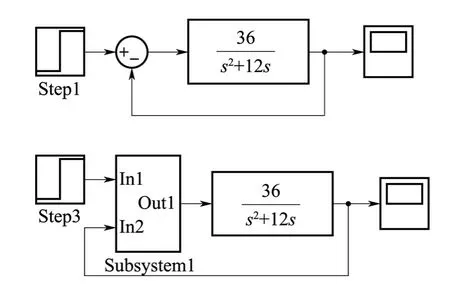
图3 典型二阶系统Fig.3 Typical second-order systems
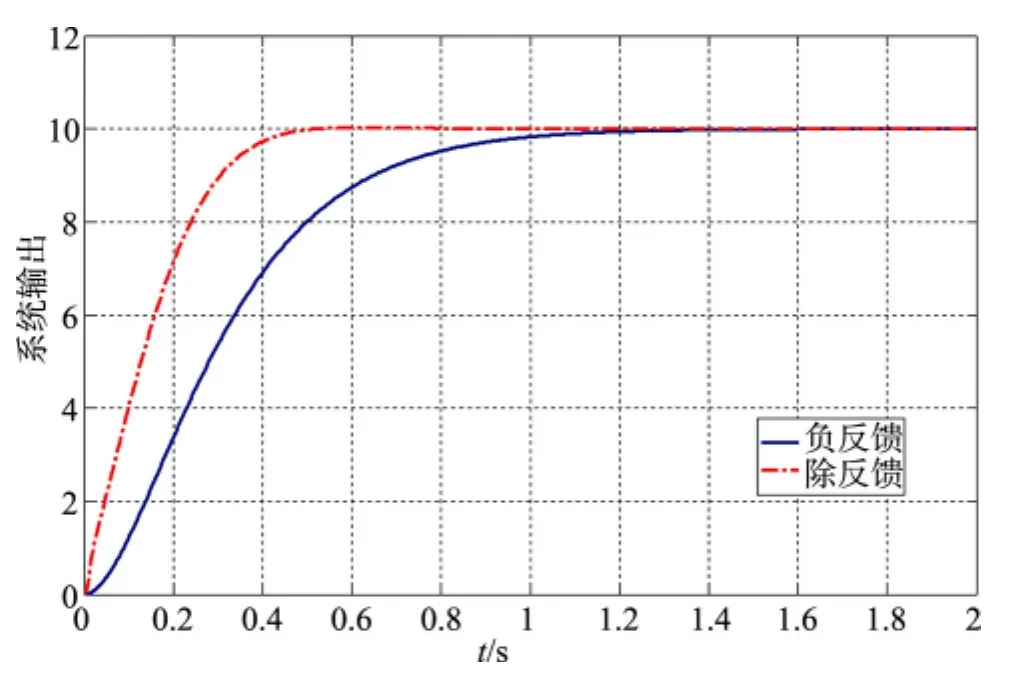
图4 两种系统上升时间对比Fig.4 The contrast between two systems's response time
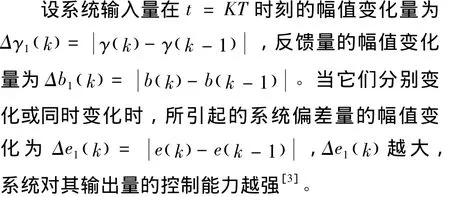
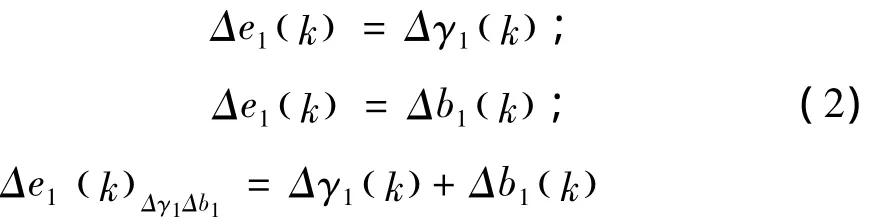
对于单一的负反馈控制系统,即原系统,Δγ1()k 和Δb1()k 分别变化或同时变化,所引起的Δe1()k的最大值分别为:
对于具有除反馈和除前馈的负反馈控制系统,即新系统,设输入量和反馈量在其幅值变化前有
γ1=b1,Δγ1()k 和 Δb1()k 与式 (2)中的相等,
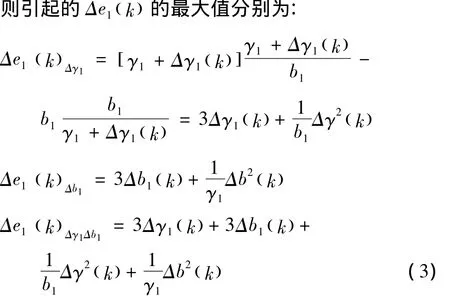
比较式 (2)和式 (3)中各对应式知,新系统对系统的控制能力是原系统的3倍多,式 (2)和 (3)也是新系统所有性能指标提高到原系统的3倍的理论依据,这是新系统的第二个特点。
5 系统抵抗前向通道的外干扰和参数变化对其输出量的影响的特性
单一的负反馈控制的原系统,只靠负反馈一种控制通道来抵抗其前向通道的外干扰和参数变化对系统输出的影响,新系统又增加了除反馈和除前馈,与负反馈一起,综合作用,来实现上述功能。通过式 (2)和式 (3)看出,新系统的反馈硬度是原系统的三倍,也就是说新系统抵抗其前向通道的外干扰和参数变化对系统输出量的影响是原系统的三分之一。
新系统反馈硬,使它具有抵抗舵面的反操纵的能力,这样就可以将飞行器的舵面的压心设计在舵轴上或其附近,大大减少舵面的气动铰链力矩,这一方面可以减小舵机的输出力矩,另一方面可增大舵面对飞行器的控制力矩,从而提高飞行器的机动能力。这是新系统的第三个特点。
6 结束语
1)具有除反馈和除前馈的负反馈系统,具有本文所提出的三个特点。能够显著提高系统的控制性能,适用于飞机、导弹特别是高速、超高速飞行器的控制系统中。
2)本文只提出了具有除反馈和除前馈的负反馈控制系统的基本控制方案和基础理论。重点分析了新系统的动态特性,后续将针对系统设计与应用作进一步阐述。
[1]Alexander C K,Sadiku M N O..Fundamentals of Electric Circuits[M].3rdedition,New York:McGrawHill,2007.
[2]Astrom K J,Franklin.Control Systems Engineering Education[J].Automatica,32(2).2.
[3]KuoB C,Golnaraghi F著,王小帆,李翔译。Automatic Control Systems[M].第 8版,北京:高等教育出版社。[KuoB C,Golnaraghi F Automatic Control Systems[M].8thEdition Beijing:Higher education press.Translate Wang Xiaofan and LiXiang.]
猜你喜欢
装备环境工程(2022年9期)2022-10-13 05:17:14
兵器装备工程学报(2021年12期)2022-01-11 04:30:04
四川大学学报(自然科学版)(2021年1期)2021-01-26 07:39:14
智富时代(2019年2期)2019-04-18 07:44:42
电子制作(2019年23期)2019-02-23 13:21:36
科学与财富(2018年25期)2018-10-19 16:09:22
航空工程进展(2018年3期)2018-08-31 02:10:54
河北软件职业技术学院学报(2015年3期)2016-01-01 07:29:50
飞行力学(2015年5期)2015-03-15 12:04:54
中国科技博览(2014年36期)2014-09-03 00:01:47
