
STEM教育视野下小学低年级智能机器人教学模式研究
2014-07-05 12:48杜娟臧晶晶
中小学信息技术教育 2014年5期
杜娟 臧晶晶

【摘 要】在基础教育领域,智能机器人教学以其让学生在动手操作的过程中培养逻辑思维能力、合作精神和创新能力的特点,成为培养创新型人才的良好载体。本文通过分析STEM教育理念,结合中国国情和实践构建了基于活动的小学低年级智能机器人体验学习模式,对于提高学生的科学素养、工程素养、数学素养、技术素养具有一定的理论价值和应用推广价值。
【关键词】STEM教育;小学智能机器人;体验学习;教学模式
【中图分类号】G443 【文献标识码】A
【论文编号】1671-7384(2014)05-0052-03
研究背景
1. STEM教育的内涵
STEM教育源自20世纪80年代的美国,其内涵旨在将科学、技术、工程、数学这四个领域看作彼此联系的整体,试图提高未来国家的国际竞争力。在STEM教育中,科学素养是重点,是为学生将来进一步从事科学研究打下基础;技术素养和工程素养则是在实际的社会分工中最经常体现的,它以明显的应用特点为科学研究提供工具和思路;数学素养是STEM教育的基础,技术深入、工程论证、科学推理和建模,都需要数学作为基础。
21世纪的竞争,归根到底是人才的竞争。面对“为什么我们的学校总是培养不出杰出人才”的钱学森之问,我们试图通过融合重整科学、技术、工程和数学这四大领域的教学内容,培养出适应21世纪的复合型、创新型人才,达到钱先生的“大成教育”的理想。
2. 智能机器人教学的意义及现状
智能机器人技术是涉及机械、电子、计算机、人工智能等多种技术的实践性学科。智能机器人教学的总体目标是在了解机器人内部构造、功能及应用状况等知识的前提下,动手搭建机器人,设计机器人行动策略,编写机器人程序。由于其自身的知识综合性和技术应用领域的广泛性,为培养学生的综合能力,如逻辑思维能力、分析和解决问题的能力、动手能力、合作能力和创造能力提供了良好的平台。因此,机器人教学是素质教育的重要载体,将对社会发展和人才培养产生重大影响。
教育部 2003 年颁布的《普通高中信息技术课程标准(实验)》中,把“人工智能初步”和“简易机器人制作”设为技术领域的选修模块,意味着我国的人工智能和机器人教育在大众化、普及化层面上进入了一个新阶段[1]。随着信息化的发展以及人们科技意识的加强,机器人教学逐渐趋于幼龄化,很多经济发达地区从小学低年级开设智能机器人(校本)课程、兴趣班,社会上的幼儿机器人培训班、机器人高手俱乐部层出不穷。学校及市场培训机构的教学质量关系到该领域能否健康、良性发展,也关系到面向21世纪未来人才的培养。
3. STEM教育视野下的智能机器人教学
智能机器人教学能够实现STEM教育四要素的有机整合。如在完成FLL机器人前进爬坡并摘取果实的任务时,教师通常会要求学生先思考可以有几种策略完成任务、哪种策略最佳。在编程时,教师要求学生画程序流程图,通过反复测试、分析现象、发现问题、提出修改方案并及时调整,使机器人表现出最佳状态。在这一任务中,体现了如下素养。
科学素养:运用重力、摩擦力等物理知识,需要具备确定问题、寻找思路、解决问题、相互共享制作经验的科学精神。
工程素养:编程之前画流程图,这是工程设计的基本思想,机器人编程调用标准化程序模块也蕴涵了工程意识。
数学素养:需要测量斜坡高度和手臂长度,并通过计算,得出机器人的速度和完成任务所需时间等。
技术素养:指对科学和技术进行评价和做出相应决定所必需的基本知识和能力。学生在分析任务、选择策略和编写程序上均体现了技术素养的运用。
STEM教育视野下小学低年级机器人教学模式探索
1. 基于活动的体验学习模式
基于活动的体验学习模式源自于体验学习法,是指从学生个体发展的需要和认知规律出发,在亲身经历学习的过程中,通过反复观察、感受、实践、探究,对知识进行感悟与理解的学习方法[2]。
应用最广泛的体验学习理论模型是1984年由库博提出的四阶段循环模型,又称为“体验学习的循环理论模型”。库博用四个元素建立起了该模型:具体的体验、观察与反思、形成抽象的概念和普遍的原理、在新情境中检验概念的意义(如图 1)。
图1 体验学习四阶段循环模型[3]
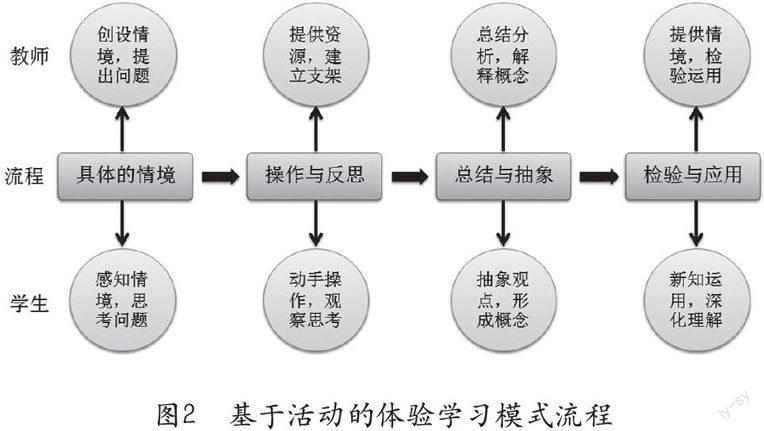
基于活动的体验学习模式则通过教师设计的一系列渐进的具有逻辑性、趣味性的活动,使学生在具体情境中结合实践和反思来获得知识与技能,具体的教学流程(如图2)。
图2 基于活动的体验学习模式流程
第一阶段:教师创设情境,提出问题,学生感知情境,思考问题,带着问题进入具体的实践——观察。
第二阶段:学生在教师的指导下,通过教师提供的资源和工具动手操作,在实践中观察与反思,并感知情境,发现一些对后续学习有用的信息与资源。
第三阶段:学生将学习内容抽象成新的观点和方法,新的概念在头脑中初步形成。
第四阶段:学生自己遇到或由教师提供各种类似的情境,检验第三阶段形成的想法、观点、理论和认识。
2.《竞速小车》教学案例
学生特征分析:本课教学所面对的是辽宁省某市青少年活动中心的低年级组学生(小学二、三年级居多)。他们的特点是好动,注意力易分散,抽象思维尚未完全建立,但思维活跃,具有强烈的探究欲望,不滿足于对书本知识的简单死记硬背。在前面的学习中,学生们已经知道了一般机械的组成,知道常见的传动方式,并且已有使用乐高教学材料的经验。
教学目标:知识与技能:了解常见齿轮传动的特点、形式;探究如何通过齿轮传动结构使机器人加速。过程与方法:通过实践了解齿轮传动结构的基本规律,提高学生应用所学知识解决实际问题的能力;通过小组合作和汇报交流促进学生的协作探究精神、学习交流能力、语言表达能力以及分析总结能力。情感、态度与价值观:对机器人技术有求知的欲望,产生探究科学的勇气。
活动准备:乐高教育器材、PPT课件、黑胶带(粘贴跑道)、活动记录表、秒表等。
活动过程:
环节一:情境创设
教师播放F1赛车视频,请学生谈谈感兴趣的话题,如“你知道在F1中,最快的赛车时速是多少吗”、“有哪些著名的赛车手”、“F1团队获胜的秘诀是什么”等等,进入今天的课题:我们自己设计并搭建一辆电动小车,看什么样的小车跑得最快!(板书:竞速小车)
意图:通过情境引入本次活动主题。
环节二:操作与反思
师:生活中有一些常见的简单机械可以实现速度的变化,你都知道哪些?
学生思考后回答:滑轮、齿轮。
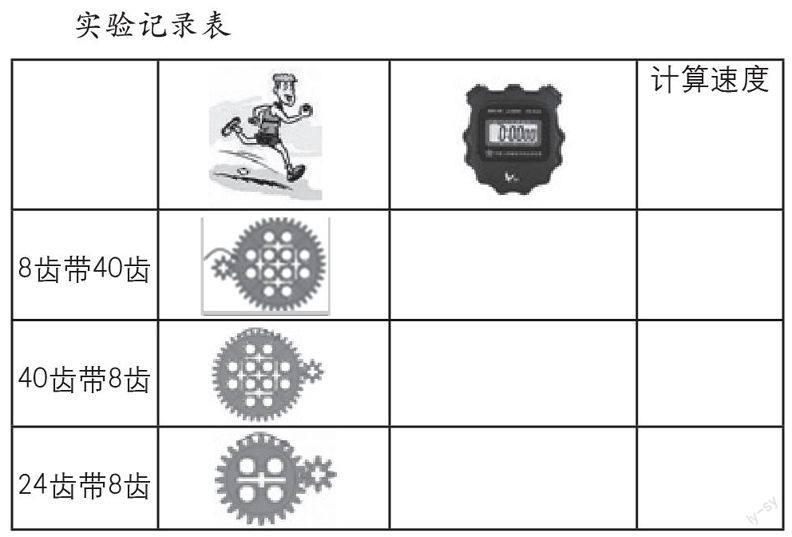
师:在机器人的设计中,机械结构是完善系统的一个重要因素。在零件盒中老师给大家提供了三种齿轮,请同学们按照实验记录的要求,搭建不同齿轮结构的小车,探索齿轮的特性。
学生以小组为单位动手搭建小车,教师让学生思考:在搭建过程中应该注意什么?
搭建好小车的组可以将电动车放在平直的跑道上,用秒表测试行驶所需要的时间。每次测试前,先估计一个时间,看看实际用时和预估时间是否接近,并将记录填写在实验记录表中。
实验记录表
教师提出四个问题:(1)你们的小车在前进过程中出现了哪些问题?你们是怎么处理的?(2)你们小组哪种组合跑得最快?为什么?(3)谁能总结一下,齿轮传动结构对速度有哪些影响?(4)转速相同的情况下,为什么大齿轮带动小齿轮时的速度会变快呢?
意图:让学生对他们看到的或建构的内容进行思考,对方案进行探讨、反思并调整他们的看法,同时也通过提问鼓励学生继续探究。
环节三:总结与抽象
经过观察思考,学生得出结论:(1)在传动中,产生加速的方法就是大齿轮带动小齿轮,相反,如果需要减速的话,就是小齿轮带动大齿轮。因为大齿轮牙齿多,它转动一圈,会带着小齿轮转动好几圈。(2)速度加快的小车反而起步很慢,因为小车起步的刹那马达需要力量来启动,所以启动速度不够快。
环节四:验证与应用
活动的最后,请学生结合今天活动的内容,发挥聪明才智,设计爬坡机器人。
师:什么样的齿轮结构可以使你的机器人小车顺利爬上陡坡?在记录表上画出你的设计并实践。
意图:把孩子们引入一个新的“联系”阶段,使他们在螺旋式上升的循环中接受难度不断增加的挑战。
3. 总结分析
教学中,学生不仅获得了与机械、物理知识有关的感知能力,探索了齿轮传动结构的基本规律,还在操作与反思阶段对不同组合的齿轮进行了“测试—比较—分析”,体现了工程設计的基本思想。对时间的预估以及对小车速度的计算强化了学生的数学能力,而动手对不同齿轮进行组合和搭配,并检验其效果,最后得出加速与减速的搭配规律,则提高了学生的技术素养。可见,在基于活动的体验学习模式中,学生通过一系列的阶段性学习过程获得了相应的改变,使其有能力再投入到新一轮具体体验情境中去学习,并再次获得新经验。这种模式不仅关注知识与技能的获得,更关注对实践过程的总结和反思,形成科学地解决问题的思路,这种模式更适于低年级课外科技活动。
学生经历了科学研究的所有阶段,从关注问题、发现探索、搜集数据、分析归纳、推理筛选到最后利用技术得出研究结论的科学方法,形成一系列科学研究方法,具备工程意识和信息素养,为日后的研究和创新奠定必要的基础。
当然,随着STEM到STEAM,将艺术和设计的元素融入其中,将赋予学生作品丰富的表现力。我们将继续探索如何在智能机器人教学中培养学生的艺术素养和创意设计能力。
注:本文系2011年全国教育信息技术研究青年课题《中小学智能机器人教育的理论和实践研究(立项编号:112340246)和辽宁省教育科学“十二五”规划2013年度课题《基于虚拟名师工作室的教师发展共同体研究》(项目编号:JG13CB094)系列研究成果之一。
(作者单位:辽宁沈阳师范大学教育技术学院 辽宁省电化教育馆)
参考文献
1 张剑平,王益.机器人教育: 现状、问题与推进策略[J] . 中国电化教育, 2006,(12):65-68.
2 李英.体验:一种教育学的话语[J] .教育理论与实践,2001(12):1-5.
3 Johanrm Steggert Hunsaker,The Experiential Learning Model and the Learning Style lnvcntory:An Assessment of Current Findings,Journal of Experiential Learning and Simulation,NewYork:Eiseivcr North·Holland,lnc.volumn2 number 3 September 1980.
猜你喜欢
少男少女·教育管理(2022年3期)2022-05-12
计算机时代(2016年12期)2017-01-14
考试周刊(2016年100期)2017-01-07
未来英才(2016年2期)2016-12-26
求知导刊(2016年20期)2016-09-27
考试周刊(2016年71期)2016-09-20
考试周刊(2016年62期)2016-08-15
成才之路(2016年18期)2016-07-08
科教导刊·电子版(2016年12期)2016-06-04
新课程研究(2016年21期)2016-02-28
