
地磁场中潜艇运动感应静电场建模
2014-06-28 16:44嵇斗王向军柳懿刘德红
兵器装备工程学报 2014年7期
嵇斗,王向军,柳懿,刘德红
(海军工程大学电气工程学院,武汉430033)
地磁场中潜艇运动感应静电场建模
嵇斗,王向军,柳懿,刘德红
(海军工程大学电气工程学院,武汉430033)
地磁场中的金属壳体潜艇在航行时会产生感应电动势,从而产生感应静电场,将潜艇简化为长椭球壳,分别建立了潜艇处于浮航和潜航两种状态下的运动感应静电场模型,给出了电场三分量表达式;以美海国军洛杉矶级潜艇为例进行了感应电场的仿真计算,获得了两种状态下潜艇水下电场分布,仿真结果表明:感应电场在潜艇附近量值较大,随距离衰减明显。
地磁场;感应电场;潜艇;电场模型
作为重要的目标特性,舰艇水下电场是海洋环境、舰艇自身状态及参数等多种因素综合作用的结果。人们在利用舰艇电场信号时,需要弄清各种来源电场的基本特性,对不同来源的舰艇水下电场进行建模和分析是实现这一目标的主要途径。针对腐蚀相关静电场,文献[1]建立了腐蚀电场的边界元模型。文献[2-3]对轴频电场进行了建模和分析。针对磁性艇体运动产生的感应电场,文献[4]中建立了磁偶极子阵列模型,研究其分布特性。钢铁建造的舰艇,在航行时将切割地磁场磁力线产生感应电场,文献[5]通过水平直流电流元建立了水面舰船感应电场模型。与水面舰船相比,潜艇可处于浮航或潜航状态,外形也完全不同,其电场分布有其特殊性。在此通过建立潜艇钢制艇体运动切割地磁场感应电场模型,并进行了仿真计算,分析潜艇这一来源的电场的特性。
1 地磁场中艇体运动感应电场模型
表面防护涂层均匀完好的潜艇在海水中运动时,其钢制壳体切割地磁场磁力线会在艇两舷积累电荷而形成电势差。根据电场连续性原理,运动感应电场的大小等效于潜艇运动速度突变为0时,积累电荷形成的放电电流在海水空间中产生的电场,此时艇体内的电流密度为σ2Bzv,其中,σ2为钢制艇体材料的电导率,Bz为地磁场垂向磁感应强度,v为艇体运动速度,不考虑航速与航向的夹角。根据潜艇的外形,不考虑指挥台围壳和螺旋桨等的影响,将艇体近似假设是长轴较长的椭球体,长轴为半艇长度(L/2),短轴为半艇宽度(B/2),这里分为两种情况进行建模分析,一种是潜艇浮航时(水线深度),采用舰艇坐标系,坐标零点为潜艇吃水面中心位置,指向艇艏方向为x方向,指向右舷方向为y方向,指向地心方向为z方向,如图1所示;另另一种是潜航时,此时坐标零点位于椭球体的中心位置。图1中,吃水面xoy平面艇体以上高度为b1、下部高度为b2,水线以上艇体的最大长度设为2c,其中,水线以下艇体的长度为L。
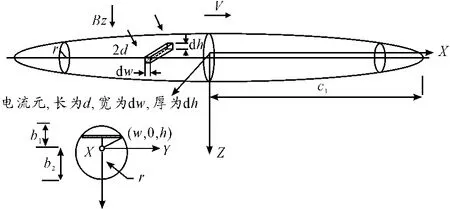
图1 运动金属艇体感应电场模型
设潜艇切割地磁场的感应电流为J,将该电流分成许多厚为dh的面电流,面电流密度为Jdh;再将面电流分成许多与y轴平行,宽为dw的线电流,对于所划分的任意线电流,中心点位置为(w,0,h),w为线电流元的x轴坐标,h为线电流元的z轴坐标,线电流密度为Jdhdw,将任意线电流电场对纵向坐标w进行积分求得任意面电流产生的电场,再将任意面电流电场对横向坐标h进行积分获得得艇体的水下电场,电流元在海水中的电场分布见文献[5]。下面分别讨论水上船体和水下船体在海水中的电场表达式,浮航时,其感应电场可以看作是水下、水上两部分艇体在海水中感应电场的叠加;潜航时,计算全部艇体在水中的感应电场。
1.1 潜艇在浮航时的运动感应电场
1.2 潜艇潜航时的运动感应电场
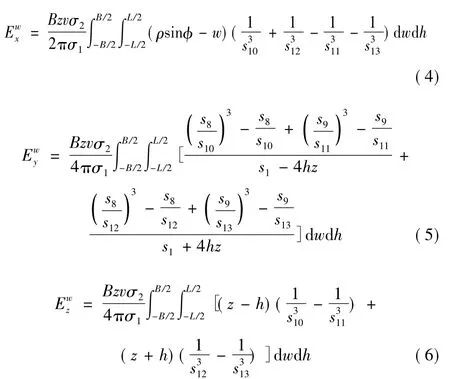
上述建模时,把艇体作为实心椭球体,获得感应电场Ew,建模时采用椭球壳体,计算时需要对实体模型结果乘以一体积比例系数ζ,获得实际潜艇切割地磁场产生的电场E,即,比例系数:
ζ=建造潜艇实际使用钢铁的体积/把实际潜艇看作钢铁实体模型时的体积。
2 感应电场仿真计算实例
以美国海军洛杉矶级潜艇洛杉矶号(SSN688)为例,计算该艇切割地磁场产生的感应电场大小。为了简化模型,将该艇看成是艇长L=109.7 m、艇宽B=10.1 m,截面为圆形的椭球体,根据该艇的参数,可得到简化模型的各参数,如下:
海水电导率σ1=4 s/m;电导率σ2=2×104s/m;Bz= 5×10-5(T);v=2.315 m/s(4.5节);潜艇浮航状态时,b1= 1.6 m、b2=8.5 m、c=50.7 m;体积比例系数ζ=0.016 5。
利用上述式(1)~式(6),代入各参数,经过仿真计算分别得到了该艇在海水中由于艇壳切割地磁场而产生的感应电场三分量。图2(a)给出了该艇浮航时潜艇下方15 m处平行于水平面的感应电场Ex分布,图2(b)给出了该艇潜航时潜艇下方15 m处平行于水平面的感应电场Ex分布。
由图2可以看出,潜艇感应电场集中在潜艇附近,在距离艇艏艉0.5倍艇长附近出现峰值,在艇体下方有一系列小的峰值出现,其他条件相同时,潜航时水下电场要小于浮航时的值。

图2 艇下方15 m平面处感应电场
3 结论
潜艇航行时,其金属壳体切割地磁场会产生感应电动势,从而产生运动感应静电场,由于潜艇既可在水面航行,也可在水下航行,本文根据潜艇的外形特点,将壳体简化为长椭球壳体,并根据线电流元在海水中的产生电场模型,分别建立了潜艇处于浮航和潜航两种状态下的感应电场运动感应静电场模型,给出了电场三分量表达式。以美海国军洛杉矶级潜艇为例进行了感应电场的仿真计算,获得了两种状态下潜艇水下电场分布。文中只考虑深海环境下的电场分布,下一步研究重点在于改进海水环境模型,提高仿真计算的精度。
[1]Adey R,Baynham J.Predicting corrosion related electrical and magnetic fields using BEM[C]//Conf.Proc.UDT.Europe,2000:473-480.
[2 Dymarkowski K,Uczciwek J,The extremely low frequency electromagnetic signature of the electric field of the ship[C]//Conf.Proc.UDT Europe,2001:1-6.
[3]卢新城,龚沈光,刘胜道,等.舰艇极低频电场的产生机理及其防护[J].海军工程大学学报,2005,15(6):70-74.
[4]陈聪,李定国.运动磁偶极子感应电场的理论和实验研究[J].华中科技大学学报:自然科学版,2010,38(10): 116-118.
[5]孙明,龚沈光,周俊,等.运动舰船切割地磁场在海水中产生的电场计算[J].电子学报,2003,31(3):1-4.
(责任编辑周江川)
Model of the Induced Static Electric Field by Moving Submarine in the Geomagnetic Field
JIDou,WANG Xiang-jun,LIU Yi,LIU De-hong
(College of Electrical Engineering,Naval University of Engineering,Wuhan 430033,China)
A submarine with metal hull can induces static electric field when itmoves across geomagnetic field.A submarine can be treated simply as ametal spheroid hullwith longmacroaxis and considering submarine in two conditions:moving on surface and diving,the induced static electric field model was deduced.Taking one USN nuke submarine as an example,the distribution of its induced electric field is simulated by computers conveniently to obtain two kinds of underwater electric field distribution.Results show that,themagnitude of induced electric field near the submarine is large with apparent characteristics of range attenuation.
geomagnetic field;induced electric field;submarine;EFmodel
:A
1006-0707(2014)07-0004-03
format:JIDou,WANG Xiang-jun,LIU Yi,et al.Model of the Induced Static Electric Field by Moving Submarine in the Geomagnetic Field[J].Journal of Sichuan Ordnance,2014(7):4-5.
本文引用格式:嵇斗,王向军,柳懿,等.地磁场中潜艇运动感应静电场建模[J].四川兵工学报,2014(7):4-5.
10.11809/scbgxb2014.07.002
2014-02-02
国防科研基金(4010308020401);总装预研基金(9140A03051010JB1102)。
嵇斗(1975—),男,副教授,主要从事电磁防护与环境工程研究。
O441
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中国舰船研究(2022年2期)2022-04-26
导航定位学报(2022年2期)2022-04-11
智能制造(2021年4期)2021-11-04
矿山测量(2021年4期)2021-09-18
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
中学生数理化(高中版.高二数学)(2020年1期)2020-02-20
北京航空航天大学学报(2017年3期)2017-11-23
新高考·高一物理(2016年7期)2017-01-23
中国舰船研究(2016年6期)2016-12-12
