基于决策树的高速公路入口合流区域换道研究
2014-06-27 05:46:40刘志强王俊彦汪澎倪捷
重庆理工大学学报(自然科学) 2014年8期
刘志强,王俊彦,汪澎,倪捷
(江苏大学汽车与交通工程学院,江苏镇江 212013)
基于决策树的高速公路入口合流区域换道研究
刘志强,王俊彦,汪澎,倪捷
(江苏大学汽车与交通工程学院,江苏镇江 212013)
针对高速公路入口合流区域换道事故频繁发生的情况,利用决策树方法建立了车辆在该区域的并线决策模型,保证车辆并线时的安全;借助车辆轨迹数据对模型进行了学习与验证。模型验证结果表明:并线车辆相对于目标车道前方车辆的相对速度是驾驶人并线时需要考虑的最重要的因素;相比传统模型,决策树模型具有更高的预测精度;模型还可进一步应用于交通仿真以及驾驶人辅助系统。
合流区域;决策树;信息增益率;车辆换道
车道变换分为强制性车道变换和自由车道变换。车道结束时将执行强制性车道变换,当想获取更好的车道时将执行自由车道变换。换道模型描述在不同交通条件下驾驶人的换道行为,这些模型是微观交通仿真不可缺少的一部分。随着汽车智能技术的发展,高效的换道模型已成为驾驶员辅助系统必不可少的组成部分。
H.N.Koutsopoulos等运用可接受间隙模型来进行换道模型[1-6]的研究。建立的模型基于同一假设,即当目标车道前后车距可以被接受时驾驶人进行并线或进行车道变换。Kita等运用离散选择模型(如二元Logit模型、博弈论)来建立换道模型[7-9]。
本文应用决策树方法来模拟驾驶员处于高速公路入口合流区域时的复杂并线决策过程。决策树方法应用于换道建模具有许多优点:首先,决策树方法是非参数性的,不需要假设分布形式;其次,决策树可以提供简单的规则去反映驾驶人的行为;再次,决策树的结果易于解释,模型结构便于实现。
1 并线行为的定义与影响因素
1.1 定义
本文将高速公路中加速车道与应急车道统称为并线车道,加速车道与应急车道的相邻车道称为目标车道。驾驶员行驶在并线车道的任何时刻都有2个选择:并线和不并线。
并线事件定义为车辆横向坐标开始向目标车道方向改变并且没有发生震荡。在并线之前的其他时刻定义为非并线事件,即驾驶人没有并线且保持驾驶在并线车道上。一位驾驶人可以参与很多次非并线事件,但只能参与一次并线事件。图1是本文研究区域与相关参数的简图。
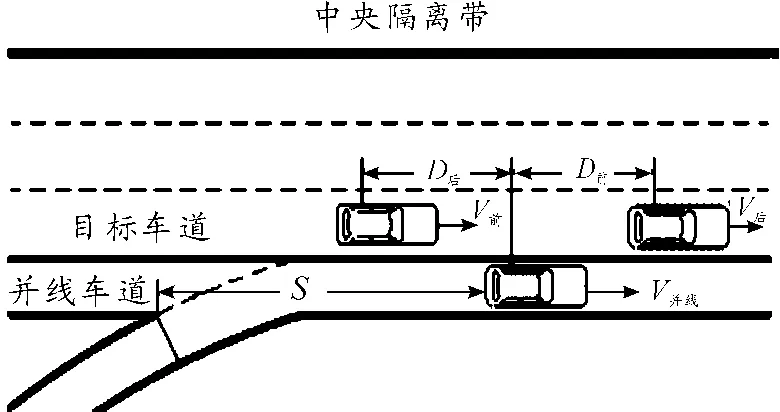
图1 研究区域与相关参数简图
研究通过车辆轨迹数据获得325次观察值,其中包括177次非并线事件和148次并线事件。数据集被进一步划分,其中80%用于模型训练,20%用于模型测试,部分训练数据如表1所示。

表1 部分训练数据
1.2 影响并线行为的因素
驾驶人行驶在并线车道上通过考虑交通状况(包括目标车道和并线车道)来决定是否并线。影响驾驶人并线决定的因素有很多,根据文献[2,5],有5个主要因素影响驾驶员的并线行为,它们将作为本文决策树模型C4.5算法的输入变量,见表2。

表2 并线行为影响因素信息
1)ΔV前:并线车辆与目标车道前方车辆的速度差(m/s)。ΔV前=V前-V并线,其中:V前是目标车道前方车辆的速度;V并线是并线车辆的速度。
2)ΔV后:并线车辆与目标车道后方车辆的速度差(m/s)。ΔV后=V后-V并线,其中:V后是目标车道后方车辆的速度;V并线是并线车辆的速度。
3)D前:并线车辆与目标车道前方车辆的距离(m)。
4)D后:并线车辆与目标车道后方车辆的距离(m)。
5)S:并线车辆离并线车道入口的距离(m)。
在上述5个影响因素中:2个车间距指标D前和D后反映并线换道时目标车道是否具有合适的并线换道空间;2个速度差指标ΔV前和ΔV后反映并线换道时的潜在危险性;距离指标S反映车辆并线换道的紧迫程度。
2 基于决策树的并线换道模型
决策树方法运用自上而下的递归方式,从决策树的根到叶结点的每一条路径对应着一条分类规则,整个决策树对应着一组分类规则表达式。每一个非叶结点都与属性中具有最大信息量的非类别属性相关联。本文采用决策树C4.5算法,选择具有最高信息增益率的属性作为整个集合S的测试属性[10-13]。
1)信息增益与信息增益率。信息增益来源于信息论中熵(Entropy)这一概念。本文的训练数据集S包含了s个数据样本。定义C1,C2代表两个决策类:并线类与不并线类,那么s1,s2就是类C1,C2中的样本数目。给定的样本分类所需要的期望信息Info(s1,s2)可以由式(1)计算得出。

其中pi是样本属于Ci的概率,用si/s来估计。
分别计算当各属性(V1,V2,D1,D2,S)作为分裂属性时它们的信息增益率,选择信息增益率最大的属性作为最佳分裂属性。
假设属性V1可以取{a1,a2,…,am}m个不同值,那么可以用属性V1将S划分成m个子集{S1,S2,…,Sm},而Sj包含S中含有值aj的样本。如果将V1作为测试属性(最佳分裂属性),则这些子集对应于由包含集合S的结点生长出来的分支。设sij是子集Sj中类Ci的样本数,则由V1划分成的子集的熵E(S,V1)可以由式(2)计算得出。

其中第j个子集的权值等于子集中的样本个数除以集合S中的样本总数。熵值越小,子集划分的纯度越高。对于给定的子集Sj,其期望信息Info(s1j,s2j)可以由式(3)计算得出。


根据期望信息和熵值可以计算出相应的信息增益值。属性V1分支上得到的信息增益Gain(S,V1)可以由下式计算得出:

信息增益率是在信息增益概念基础上发展起来的,属性V1的信息增益率GainRatio(S,V1)可以用下面的公式计算得出:

比较上述5个属性的信息增益率,数值最大的属性就是最佳分裂属性,根据分裂属性的取值,可以得到决策树分支,从而将数据集划分为多个子集。对每一个生成的子树重新计算各属性信息增益率,依次类推,直至某一子集中的样本属于同一类,决策树停止分裂。
2)属性阈值的选择。本文中的5个属性都是连续型数字属性,需要确定它们的阈值。首先需要将连续属性进行离散化处理,将属性值划分成若干个区间;然后运用Fayyad边界点判定定理[13],计算相邻两类区间边界点处属性值的信息增益率,选择信息增益率最大的属性值作为最优阈值。
3)树的剪枝。按照上述步骤,借助训练数据可以构建出并线行为决策树。生成决策树后要通过计算节点的分类错误来进行树的剪枝。本文的决策树C4.5算法采用后剪枝算法中的降低错误剪枝法REP(reduced error pruning)。对于决策树中每个不为叶节点的子树ST,根据对测试样本集的分类结果判断是否将其用叶节点代替。用e表示保留子树ST时对测试集的分类错误率,e'表示用最佳叶节点代替ST后对测试集的分类错误率。如果满足e'≤e,则对ST进行剪枝,将其用叶节点代替;否则,不对ST进行剪枝。重复这个过程直到对任何子树进行剪枝都会增加对测试样本集的分类错误率。最终得到的决策树是对测试样本集的分类精度最高的决策树,同样这棵决策树也是获得该分类精度的规模最小的决策树。
本文的决策树C4.5算法通过weka软件平台实现。图2为通过weka修剪后的并线行为决策树。

图2 并线行为决策树
决策树结构中的终端节点用方框表示,决策节点用圆圈表示。在终端节点内标记类标签以观测样本数。决策树根节点通过相对速度V1进行分裂,这就表明并线车辆相对于目标车道前方车辆的相对速度是驾驶人做出并线决策需要考虑的最重要因素。决策树模型的决策过程清晰、直观,易于理解:如果并线车辆相对于目标车道前车速度较慢(V1≥0 m/s)或者稍微比前车快一点(0>V1≥-3.1 m/s),距离目标车道前后方车辆车距较大(D2≥7 m,D1≥7.6 m),且进入并线车道不远(S≤56.4 m),此时驾驶人可以并线。但如果仅因为与后车的距离没有足够大(D2<7 m),那么驾驶员也不会进行并线。与此相反,如果并线车辆相对于目标车道前车速度过快(V1<-3.1 m/s),距离目标车道前车车距较小(D1<17.1 m),那么驾驶人不进行并线。由此可见,决策树模型反映出的规则在日常驾驶中都有所体现。
4)分类规则。从决策树根节点到任意一个叶节点所形成的一条路径都构成一条分类规则。根据图2的并线行为决策树,可以提取出“IF-THEN”形式的分类规则(表3)。
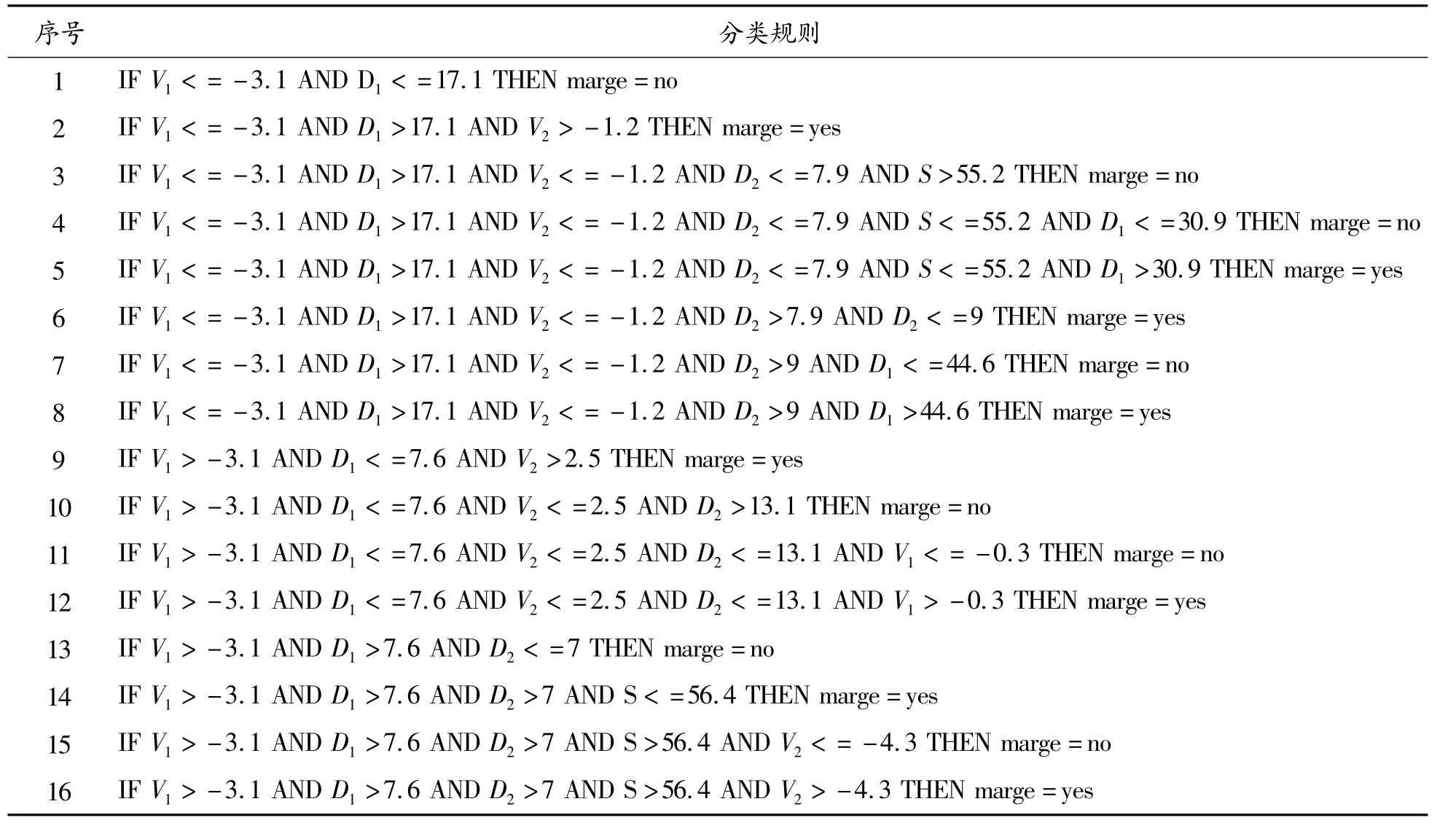
表3 并线行为决策树分类规则
3 模型验证
本文的交通数据从Next Generation Simulation (NGSIM)(14)获得,数据用于决策树模型的学习与验证。数据集中的轨迹数据提供每辆车的纵坐标、横坐标、速度、加速度和前后两车间隔时间,采样频率为10 Hz。
使用分类规则对测试数据进行识别(表4是部分测试数据),并将识别结果与实际并线情况进行对比,用识别的准确性来验证模型的有效性。表5是模型最终的预测结果。

表4 部分测试数据

表5 决策树模型结果
模型验证结果显示:决策树模型的测试数据精确度达到89.2%,表明将该模型用于高速公路入口合流区域车辆并线情况研究是可行的。
4 结束语
通过对驾驶人并线行为影响因素的分析,建立了驾驶人并线行为的决策树模型,并借助车辆轨迹数据对模型进行了学习与验证。验证结果显示预测精确度高达89.2%,表明运用提出的决策树模型来预测驾驶人的并线行为能够获得较好的结果。
未来,决策树模型可应用于微观仿真和驾驶员辅助系统开发:换道模型会成为微观交通仿真计划的重要组成部分;驾驶员辅助系统能使驾驶员在高速公路入口合流区域换道时得到指示信息,帮助驾驶人做出并线决策,以保障车辆与驾驶人的安全。
[1]王军雷,李百川,应世杰,等.车道变换碰撞预警分析及最小纵向安全距离模型的研究[J].人类工效学,2004(4):16-19.
[2]Yang Q,Koutsopoulos H N.A Microscopic Traffic Simulator for Evaluation of Dynamic Traffic Management Systems[J].Transportation Research,1996,4:113-129.
[3]智永锋,张骏,史忠科.高速公路加速车道长度设计与车辆汇入模型研究[J].中国公路学报,2009(2):93 -97.
[4]Hidas P.Modeling Vehicle Interactions in Microscopic Simulation of Merging and Weaving[J].Transportation Research,2005,13:37-62.
[5]王荣本,游峰,崔高健,等.车辆安全换道分析[J].吉林大学学报:工学版,2005(Z):179-182.
[6]Toledo T,KoutsopoulosH N,Ben-Akiva M.Integrated Driving Behavior Modeling[J].Transportation Research,2007,15:96-112.
[7]Kita H.Effects of Merging Lane Length on the Merging Behavior at Expressway On-Ramps[C]//Proc.12th International Symposium on the Theory of Traffic Flow and Transportation.China:[s.n.],1993:37-51.
[8]Meng Q,Weng J.A Cellular Automata Model for Work Zone Traffic[C]//Transportation Research Record,No. 2188,Transportation Research Board of the National A-cademies.Washington:[s.n.],2010:131-139.
[9]Kita H.A Merging-Giveway Interaction Model of Cars in A Merging Section:A Game Theoretic Analysis[J]. Transportation Research,1999,33A:305-312.
[10]房丽侠,魏连雨,闫伟阳.基于决策树的交通拥挤状态预测[J].河北工业大学学报,2010(2):105.
[11]毛国君,段立娟,王实,等.数据挖掘原理与算法[M].北京:清华大学出版社,2005:109,126.
[12]范明,范宏建.数据挖掘导论[M].北京:人民邮电出版社,2006:89-118.
[13]Fayyad U M,Irani K B.On the handling of continuousvalue attributes in decision tree generation[J].Machine Learning,1992,8(1):87-102.
[14]傅亚莉.数据挖掘技术C4.5算法在成绩分析中的应用[J].重庆理工大学学报:自然科学版,2013(11):78 -82.
(责任编辑 刘舸)
Research of Lane Change on Freeway On-ramp Merging Area on Decision Tree
LIU Zhi-qiang,WANG Jun-yan,WANG Peng,NI Jie
(College of Automotive and Traffic Engineering,Jiangsu University,Zhenjiang 212013,China)
Freeway on-ramp merging area is general accident-prone section.This paper establishes the vehicle merging decision model based on decision tree in this area in order to ensure the safety of the vehicle.Vehicle trajectory data were used for model learning and validation.Model validation results show that:the relative speed of the merging vehicle with respect to the lead vehicle in the target lane is the most important factor affecting the driver’s merging behavior.Compared to the traditional models,the decision tree model has higher prediction accuracy,and that the model can be further applied in traffic simulation and driver assistance systems.
on-ramp merging area;decision tree;information gain ratio;lane change
U491
A
1674-8425(2014)08-0001-05
10.3969/j.issn.1674-8425(z).2014.08.001
2014-03-22
教育部博士点基金资助项目(20113227110014);江苏省道路载运工具新技术应用重点实验室资助项目(BM2008206002)
刘志强(1963—),男,江苏靖江人,博士,教授,主要从事道路交通运输系统安全、智能运输系统等方面研究。
刘志强,王俊彦,汪澎,等.基于决策树的高速公路入口合流区域换道研究[J].重庆理工大学学报:自然科学版,2014(8):1-5.
format:LIU Zhi-qiang,WANG Jun-yan,WANG Peng,et al.Research of Lane Change on Freeway On-ramp Merging Area on Decision Tree[J].Journal of Chongqing University of Technology:Natural Science,2014(8):1-5.
猜你喜欢
卫星应用(2021年11期)2022-01-19 05:13:02
北京航空航天大学学报(2021年6期)2021-07-20 07:23:56
科学大众(2021年9期)2021-07-16 07:02:50
中国交通信息化(2020年11期)2021-01-14 03:30:34
电子制作(2019年19期)2019-11-23 08:41:36
成都信息工程大学学报(2019年3期)2019-09-25 08:31:20
电子制作(2018年19期)2018-11-14 02:37:02
电子制作(2018年16期)2018-09-26 03:27:06
中央民族大学学报(自然科学版)(2016年4期)2016-06-27 08:06:04
中国交通信息化(2015年10期)2015-06-06 06:39:31