
EPS模糊滑模变结构控制仿真及试验研究
2014-06-27 05:46夏天陈龙黄晨江浩斌
重庆理工大学学报(自然科学) 2014年3期
夏天,陈龙,黄晨,江浩斌
(江苏大学汽车与交通工程学院,江苏镇江 212013)
EPS模糊滑模变结构控制仿真及试验研究
夏天,陈龙,黄晨,江浩斌
(江苏大学汽车与交通工程学院,江苏镇江 212013)
针对EPS电机电流跟踪特性较差,驾驶员操纵手感较差等问题,提出了模糊滑模变结构控制器,解决了滑模变结构控制到达滑模面出现“振颤”的问题。运用Matlab/Simulink对控制器进行仿真,验证了控制策略的有效性。最后,运用dSPACE的组件系统搭建了EPS快速控制原型平台,进行了实车道路试验。蛇形和双移线两种工况的实验结果进一步验证了所提出的控制策略可以保证电机电流的跟踪能力,并且具有较强的自适应性。
电动助力转向;模糊滑模变控制;电流跟踪;快速控制原型
与传统的液压助力转向(HPS)相比,电动助力转向(EPS)具有节能、安全、成本低和总装性好等优点[1],不仅能根据车速和驾驶工况实时向驾驶员提供预期的路感,而且可大大改善转向的响应性能,使车辆在经历弯道后引起的横向摆动能快速收敛[2]。
东北林业大学的詹长书[3]在动力学分析基础上建立了7自由度微分方程,设计了低通滤波器,对比分析有、无滤波环节跟踪误差值,结果显示:采用适时主动阻尼低通滤波控制降低了系统跟踪误差,助力明显且系统响应灵敏,电流跟踪效果理想。江苏大学的叶熠君[4]提出采用粒子群优化算法优化PID参数以提高系统鲁棒特性的方法,结果显示粒子群优化可以提高系统稳定性和鲁棒特性,且电机电流超调量很小,提高了助力电流的跟踪能力。
针对电控助力转向常规控制方法电机电流跟踪特性较差造成电机输出的助力力矩与目标输出力矩之间存在误差、助力不足及驾驶员操纵手感差等方面的问题进行了分析研究,提出了模糊滑模变结构控制方法以提高电机电流跟踪能力以及驾驶员手感。针对硬件在环开发周期长、离线仿真不足以验证控制方法有效性的问题,采用半实物仿真手段验证模糊滑模变结构控制器的性能。
1 理论分析
1.1 EPS系统建模
为了便于研究,本文对C型EPS助力模型进行了简化,忽略转向盘、电机以及转向柱间的摩擦,将系统质量分别集中在转向盘、转向小齿轮和电机上[5-6],建立了EPS动力学模型及电机方程:

式(1)~(5)中:θh为转向盘转角;N为转向轮到前轴间的传动比;N1为电机减速比;e为轮胎拖距;Tc为转矩传感器测量转矩;θp为小齿轮转角; Ta为助力力矩;Js为转向盘当量转动惯量;Bs为转向盘当量阻尼;Td为驾驶员输入转矩;Jp为转向小齿轮当量转动惯量;Bp为转向小齿轮当量阻尼; Ff为轮胎侧偏力;Ua为电机端电压;i为电枢电流;KT为电机磁力矩系数;Kb为电动势常数;Jm为电机转动惯量;Bm为电机阻尼;R为电枢电阻;L为电枢电感;θm为电机转角;im为电机减速比;δ为前轮转角。
1.2 助力特性曲线确定
助力特性是指电机助力随汽车运动状态和受力状况(车速和转向盘转矩)变化而变化的规律[7]。理想的助力特性应充分协调好转向轻便性与路感之间的关系。本文借鉴国内外研究现状,选用了直线型助力特性曲线:
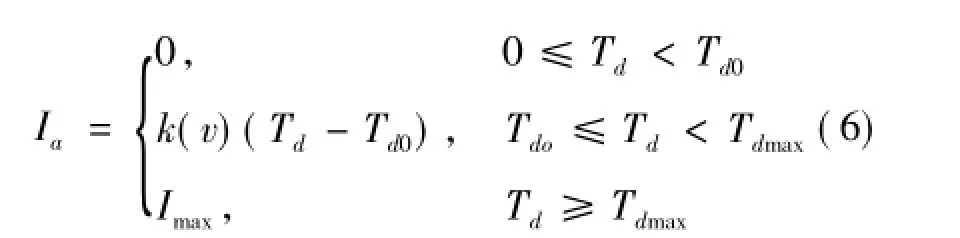
式(6)中:Td0为开始助力时转向盘力矩;Td为驾驶员转矩;Tdmax为驾驶员输入的最大转矩;Imax为最大助力电流;Ia为控制器计算出的电流;k(v)为速度感应系数,根据表1在Matlab中3次拟合得到。

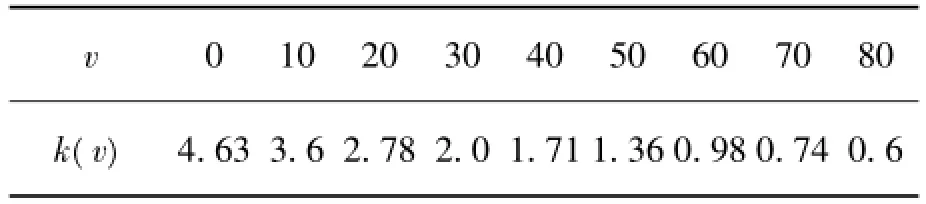
表1 速度感应系数
2 模糊滑模变结构控制器设计
电控助力转向采用常规控制方法时存在电流跟踪特性差的问题,使助力不足、驾驶员的操纵手感差。智能模糊滑模变结构控制方法能解决滑模变结构控制到达滑模面出现“振颤”的问题,改善电机的电流跟踪能力,提高系统的鲁棒性[8-9]。
模糊控制器输入为跟踪误差信号|s|,即|ir-i|,论域为[0 6],输出为趋近率参数ξ,论域为[6 15]。输入、输出确定了4个模糊子集:ZR (零),PS(正小),PM(正中),PB(正大)。输入输出都采用三角形隶属函数,模糊推理采用Mamdani,解模糊采用重心法。
在Matlab中搭建EPS智能模糊滑模变结构控制器,总体结构如图1所示。
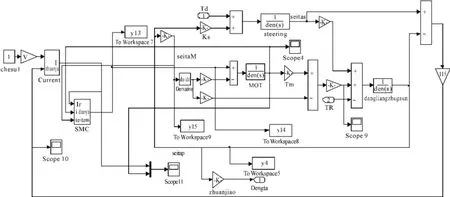
图1 智能模糊滑模变结构控制器总体结构
3 仿真分析
3.1 控制器整体性能分析
图2为不同车速下助力电流的电流特性,用于评价控制器整体效能。
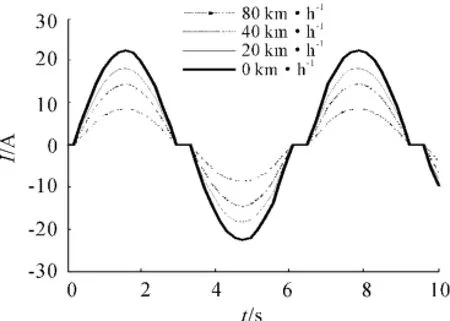
图2 电流特性
从图2可以看出:在转矩一定的情况下,车速越大电机的助力电流越小,并且助力电流过渡较为平缓,驾驶员操纵手感良好。低速时能提供大助力,减轻驾驶员操纵负担;高速时能提供小助力,保证驾驶员的路感特性。在转矩阈限值之内时,电机不助力,避免电机的频繁启动以提高电机使用寿命。结果表明,所设计的控制器整体性能良好,能够解决转向轻便性和转向路感特性之间的矛盾。
3.2 不同工况下转向助力分析
在Matlab/Simulink中搭建本次仿真试验的控制模型,如图3所示。
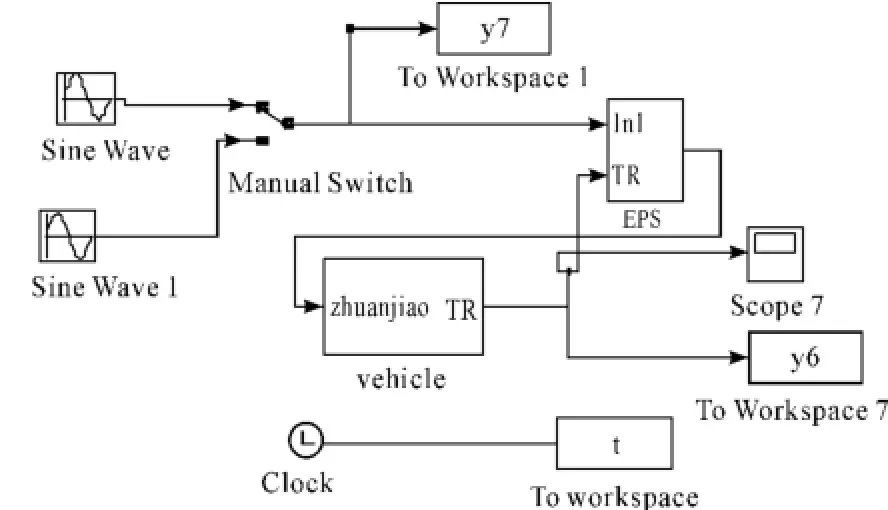
图3 控制模型
1)双移线试验。双移线试验转向盘转动1.5个周期。采用周期为5 s、幅值为6 N·m的正弦输入,试验车速设定为60 km/h,仿真结果如图4~5所示。
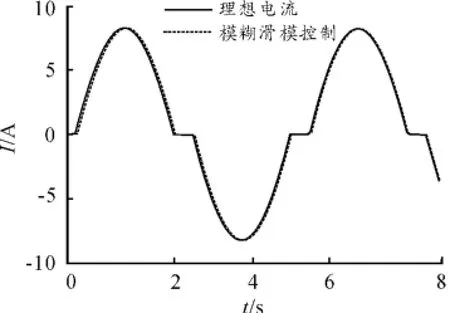
图4 模糊滑模控制电流对比
从图4、5分析可知:采用模糊滑模变结构控制后,电机的电流基本上和理想电流重合在一起,电流的跟踪能力非常好,波动性较小;电流在稳态滑模面附近出现穿越局部放大现象且存在微小抖动,数量级方面只有10-4,说明控制效果较好。
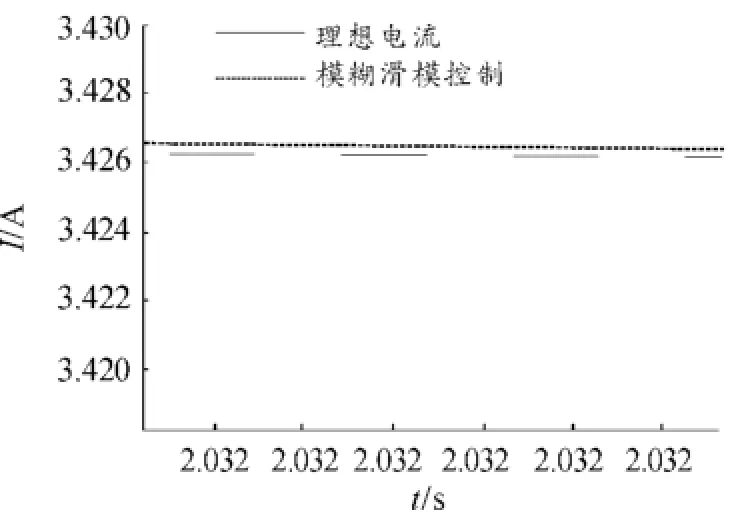
图5 模糊滑模控制电流局部放大
2)蛇形试验。蛇形试验可以定性地评估连续转向工况下EPS电流的随动响应。在Matlab中设置初始速度为55 km/h,幅值为5 N·m,周期为4 s,考察本文设计的控制策略电流跟踪能力。仿真结果如图6所示。

图6 模糊滑模控制电流
从图6可以看出:模糊滑模控制实际电流与理想电流基本重合在一起,说明实际电机电流的跟踪能力较好,电机电流波动较小,减少了转向盘抖振。
4 实车试验
整车试验装备如图7所示。
1)蛇行试验。按照国标规定,由于所试验的汽车为微型面包车,因此取L=30 m,进出口标桩宽度为10 m,实车初始速度ua=65 km/h。考虑到试验场地限制以及驾驶员驾驶水平,为避免出现危险工况,实车车速确定为55 km/h。试验结果如图8~9所示。

图7 整车试验装备
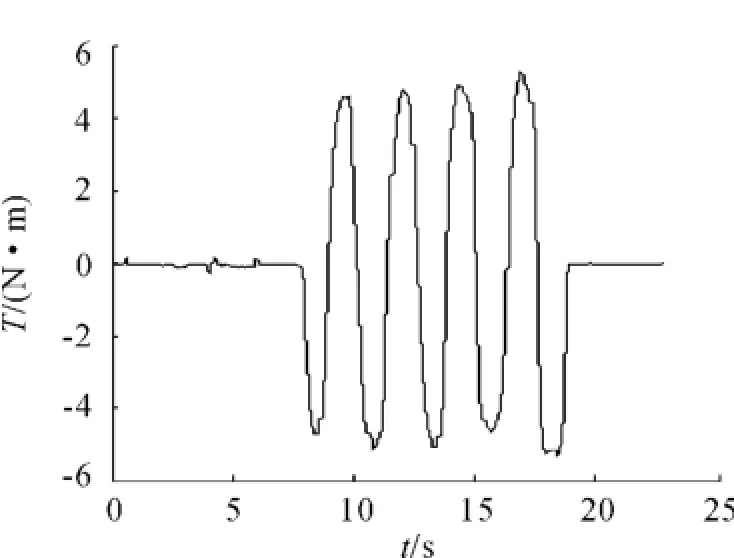
图8 模糊滑模控制转矩
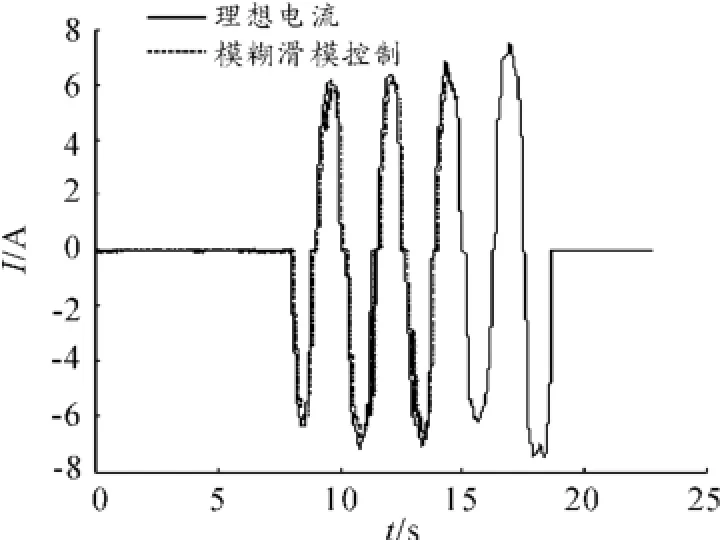
图9 模糊滑模控制电流
从图8,9可以看出:模糊滑模控制的电机电流对控制器计算出的理想电流基本是无误差跟踪;电流随动响应较好,减少了转向不足的影响,提高了驾驶员的操纵手感,避免了助力不足对驾驶员造成的心理影响。和理论仿真相比,电机电流和理想电流值之间存在3%的误差,这主要是控制器的非实时性以及传感器采集精度造成的。试验结果和理论仿真结果基本吻合,验证了控制策略的正确性。
2)双移线试验。试验车辆按照国标规定初始速度为ua=80 km/h。考虑到试验场地条件以及驾驶员驾驶水平,为避免出现危险工况,实车车速确定为60 km/h。试验结果如图10~11所示。
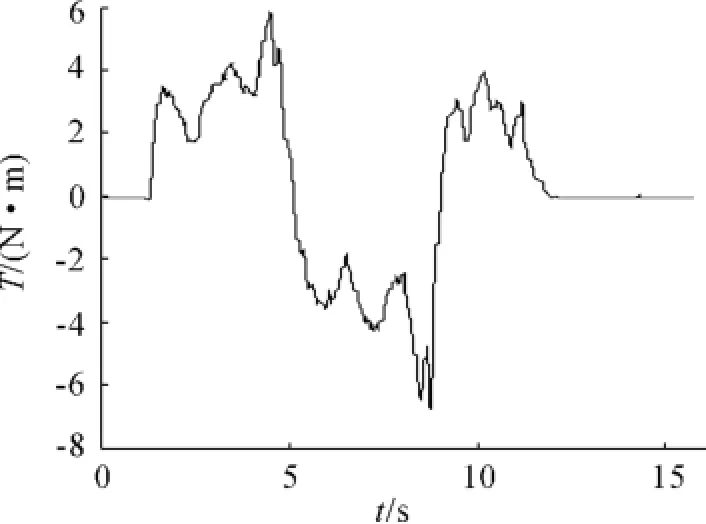
图10 模糊滑模变结构控制转矩

图11 模糊滑模变结构电流
从图10、11可以看出:模糊滑模变结构控制电机电流的跟踪效果好、系统响应迅速、助力不足性较小。在转矩阈限值之内电机不提供助力,减少了电机频繁启动,提高了电机使用寿命。
5 结论
本文结合国内外EPS研究现状,针对EPS电流跟踪能力设计了控制器,运用dSPACE进行控制器开发,在此基础上完成了实车试验,验证了所提出控制策略的正确性、有效性。研究得出如下结论:
1)模糊滑模变结构控制电机电流跟踪能力较好,电机电流和理想电流基本是无差跟踪,并且电流波动很小,有效地提高了电机使用寿命,减小了转向盘“抖振”。
2)仿真结果显示所设计的控制器总体性能符合设计要求,很好地解决了转向轻便性和转向路感特性之间的矛盾。
3)实车道路试验验证了控制器在电流跟踪控制中的效果,初步证明了该控制器的设计是正确、有效的。
[1]Badawy A,Bolourchi F,Gaut S.The Design and Benefits of Electric Power Steering[Z].SAE Paper,973041.
[2]李强,何仁.基于PI电流环电动助力转向系统的鲁棒H∞控制[J].江苏大学学报:自然科学版,2009,30 (2):138-142.
[3]詹长书,马振江,徐宁.电动助力转向系统仿真及控制策略研究[J].北京理工大学学报,2012,32(7):681-684.
[4]叶熠君,陆文昌,陈龙,等.EPS系统粒子群优化PID控制的研究[J].车辆与动力技术,2012(2):35-39.
[5]刘照,杨家军,廖道训.基于混合灵敏度方法的电动助力转向系统控制[J].中国机械工程,2003,14(10): 874-876.
[6]袁传义.半主动悬架与电动助力转向系统自适应模糊集成控制及其优化设计[D].镇江:江苏大学出版社,2007.
[7]周鑫.基于Adams与Matlab的汽车电动助力转向系统的联合仿真[D].武汉:武汉理工大学,2009.
[8]熊建桥,唐小琦,陈吉红.基于全桥半桥切换的EPS系统滑模控制的分析与设计[J].公路交通科技,2008,25(11):131-135.
[9]倪海涛,陈龙,江浩斌,等.基于整车模型的全局时变滑模变结构控制的EPS研究[J].机械设计与制造,2011(12):59.
(责任编辑 刘舸)
Simulation and Test Research on EPS Using Fuzzy Logical Sliding Mode Control
XIA Tian,CHEN Long,HUANG Chen,JIANG Hao-bin (School of Automobile and Traffic Engineering,Jiangsu University,Zhenjiang 212013,China)
In order to improve the motor current tracking performance and road-feel of driver,sliding mode variable structure control is proposed,which can avoid current chattering occurs when it approaches Sliding Surface.The controller was built under MATLAB/Simulink environment,and simulation was carried out to verify the control strategy.Then,rapid control prototype(RCP)form of EPS was designed and made with dSPACE module system,and experiment was carried out.The results show that the controller fulfilled the designed requirement during the S-shaped and ISO double line change work conditions,which confirms the validity of the control strategy.
EPS;fuzzy logical sliding mode control;current tracking;RCP
U463.4
A
1674-8425(2014)03-0017-05
10.3969/j.issn.1674-8425(z).2014.03.004
2013-11-17
国家自然科学基金资助项目(50875112)
夏天(1988—),男,江苏苏州人,硕士研究生,主要从事汽车电动助力转向研究。
夏天,陈龙,黄晨,等.EPS模糊滑模变结构控制仿真及试验研究[J].重庆理工大学学报:自然科学版,2014(3):17-21.
format:XIA Tian,CHEN Long,HUANG Chen,et al.Simulation and Test Research on EPS Using Fuzzy Logical Sliding Mode Control[J].Journal of Chongqing University of Technology:Natural Science,2014(3):17-21.
猜你喜欢
英语世界(2022年9期)2022-10-18
防爆电机(2022年2期)2022-04-26
金桥(2020年9期)2020-10-27
中学生数理化(高中版.高考理化)(2020年3期)2020-05-30
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
北京航空航天大学学报(2017年4期)2017-11-23
商周刊(2017年17期)2017-09-08
通信电源技术(2016年1期)2016-04-16
