
基于Canny算子与阈值分割的边缘检测算法
2014-06-27 06:21:04拓小明李云红田冀达
西安工程大学学报 2014年6期
拓小明,李云红,刘 旭,曹 浏,霍 可,田冀达,陈 航
(西安工程大学 电子信息学院,陕西 西安 710048)
0 引 言
边缘检测是图像分割的一种方法,通过搜索图像中各个区域的边界,从而达到图像分割的目的.图像的边缘提取是图像分析领域的基础,也是图像识别中提取图像特征的一个重要属性[1].实际中经常用到的边缘检测算子有 Prewitt、Canny、Log、Robert、Sobel等[2],不同的图像要选用不同的算子,才能达到好的检测效果[3-4].当用不同的方法对图像进行边缘提取时,Canny算子依靠其优越的特点被大多数人采用.但是Canny算子的局限性是人为设定的高阈值和低阈值,这就产生了它的阈值选取是否准确的问题.对于Canny 算子高低阈值如何选择,近几年出现了各种解决办法.运用最小二乘法推导出来的Otsu 算法[5-6]确定 Canny算子的高低阈值[7];采用迭代算法计算最佳高低双阈值[8];一种优化的Canny算子边缘检测算法[9],主要针对边缘的细化进行分析和实现;还有针对图像区域的阈值选取方法[10-11].
本文提出一种基于Canny算子与阈值分割二者结合的方法,与传统人为设定的高低阈值相比,它的适应性更好.通过运用最小均方误差法计算得到其高阈值,然后高阈值乘以一个比例系数得到其低阈值,并用数学形态法对检测后图像进行细化.通过运用这3种方法对不同图像进行边缘检测,然后对比检测效果,结果表明,采用本文的算法提取图像的边缘更加清晰有效.
1 Canny算法
Canny对检测出来的边缘信息,提出3个标准[12]:① 信噪比标准:图像检测出来的边缘是真实有效的,不必要的边缘信息尽可能少.所提取到的边缘信息连续清晰,从理论上来讲就是使信号功率比噪声功率尽可能的大,使得边缘检测的错误率最小.② 定位精度标准:对于边缘信息的提取要尽可能的准确.③ 边缘响应标准:对于一个相同边缘,响应次数要低.
Canny边缘提取的思路是,首先采用Gauss滤波器对目标图像进行平滑滤波,其次通过非极值抑制技术对平滑后的图像进行操作,最后得到边缘信息.其操作步骤如下:
(1) 高斯滤波器平滑图像采用的高斯函数
H(x,y)=exp(-x2+y2/(2σ2)),
(1)
G(x,y)=f(x,y)*H(x,y).
(2)
(2) 计算梯度的幅值和方向采用的卷积模板
φ1(x,y)=f(x,y)*H1(x,y),
φ2(x,y)=f(x,y)*H2(x,y),
得到幅值

(3)
方向
θφ=(tan(φ2(x,y)/φ1(x,y)))-1.
(4)
(3) 梯度幅值的抑制.保留全局梯度中局部梯度值最大与极大点,通过这个操作,从而使边缘的提取得到细化.

图1 分段线性灰度变换
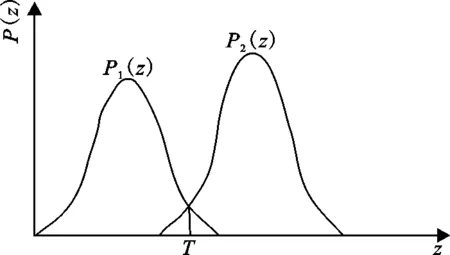
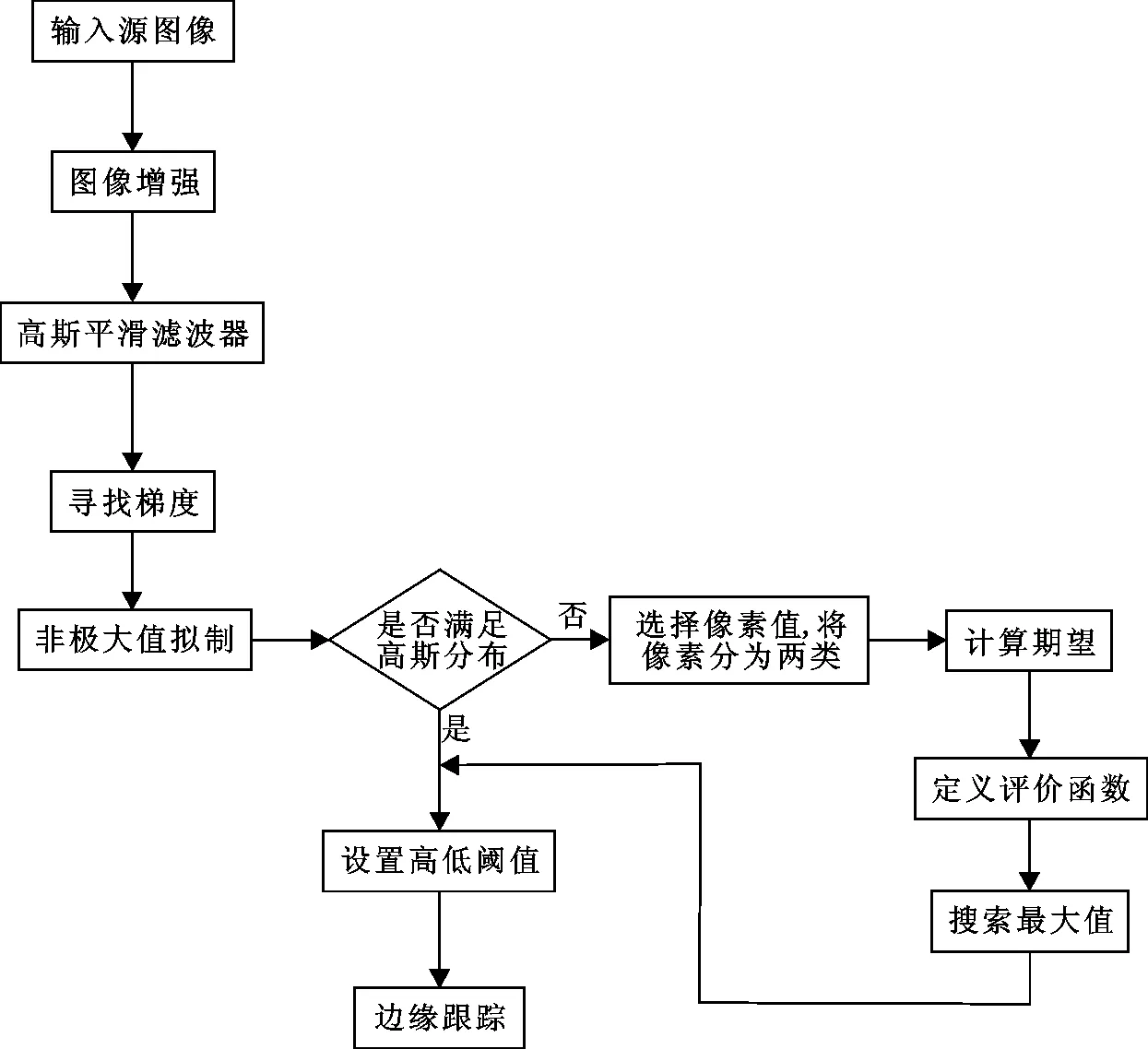
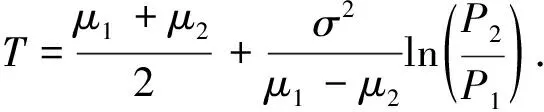
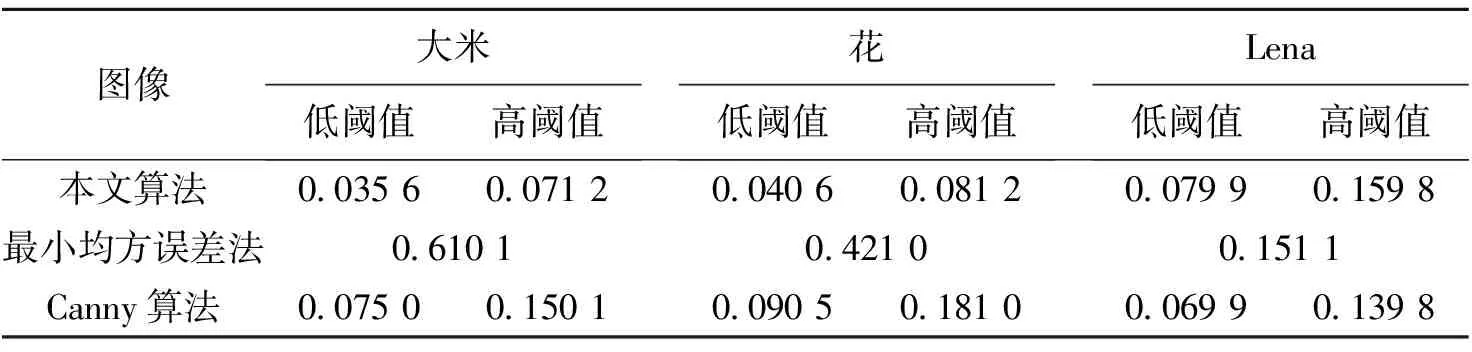
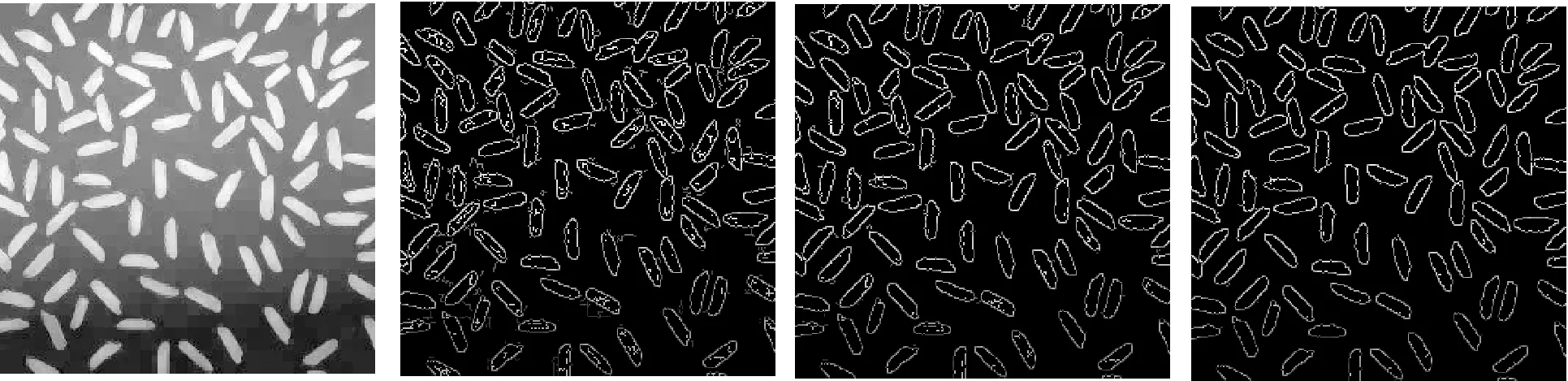
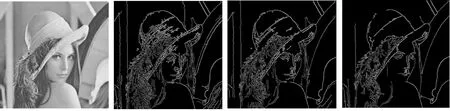
(4) 双阈值算法检测与边缘相连.通过运用T1与T2(T1 利用分段线性变换函数来增强图像对比度的方法实际上是增强原图各部分的反差,即增强输入图像中感兴趣的灰度区域.分段线性灰度变换如图1所示.其数学表达式为 (5) 该方法把图像中的灰度作为模式特征,假定各个模式中灰度的随机变量是独立分布的,并假定目标图像需要分割的模式遵循高斯分布.设定图像的灰度区域只有目标和背景.灰度值用z代替,灰度值概率密度函数的估计值用p(z)表示.设定背景灰度值和目标灰度值是概率密度函数的对应参数.图像的混合密度函数可表示为 p(z)=P1ρ1(z)+P2ρ2(z). (6) 假设图像只有背景和前景,可得 P1+P2=1. (7) 即图像中的一个像素出现的位置要么在前景中,要么在背景中.主要问题是确定阈值T的大小,运用最小均方误差法选取T,以便一个随机的像素能准确地分辨出是背景还是前景,如图2所示. 图2 最小均方误差法确定阈值 选取的阈值T,背景点错误的当成前景点的概率 (8) 选取的阈值T,前景点错误的当成背景点的概率 (9) 总错误率为 E(T)=P2E1(T)+P1E2(T). (10) 为了得到最佳阈值T,将E(T)对T求微分,令式子等于0.结果是 P1ρ1(T)=P2ρ2(T). (11) 根据这个等式解出T,即为最佳阈值. 为了得到T的表达式,设定图像的目标与背景的灰度服从正态分布,得到 (12) (13) 图3 Canny算子与阈值分割结合算法流程图 (14) 若P1=P2=0.5,则最佳阈值是均值的平均,即位于曲线ρ1(z)和ρ2(z)的交点处. T=(μ1+μ2)/2. (15) 对于一幅经过预处理的图像,σ2描述了类间方差,类间方差是数理统计上十分重要的参数.将计算出来的T作为Canny算子的高阈值,0.5T作为低阈值.Canny算子与阈值分割结合的算法的流程图如图3所示. 用MATLAB-R2013a软件对3幅不同的图像进行仿真,第一种采用最常用的Canny 算子(高阈值乘以系数0.5得低阈值)检测图像边缘,第二种采用最小均方误差法检测图像边缘,最后采用Canny算子与阈值分割结合的方法进行边缘检测分析.3幅图像进行边缘信息提取时设置的阈值如表1所示.算法仿真实验结果如图4~6所示. 表1 大米、花和Lena图像的边缘检测阈值 从图4可以看出,图4(b)含有不必要的边缘信息太多(大米里面和外面),图4(c)算法比图4(b)算法对边缘提取的效果好,但是图4(c)中仍然还有一些不必要的边缘(大米内部),图4(d)算法对边缘的提取效果最佳.经过比较分析,用Canny算子检测的边缘效果不如使用最小均方误差法检测的边缘效果好.虽然最小均方误差法检测的效果较好,但还存在一些混杂现象,而用本文的检测算法检测出来的边缘效果最佳. (a) 大米图像 (b) Canny算子检测结果 (c)最小均方误差法检测结果 (d) 本文算法检测结果图4 大米图像边缘检测结果 (a) 花图像 (b) Canny算子检测结果 (c) 最小均方误差法检测结果 (d) 本文算法检测结果图5 花图像边缘检测结果 (a) Lena图像 (b) Canny算子检测结果 (c) 最小均方误差法检测结果 (d) 本文算法检测结果图6 Lena图像边缘检测结果 图5可以看出,用前2种方法提取的边缘都出现了混杂现象,所以图像显示的比较混乱.图5(b)和图5(c)提取花瓣的边缘信息很多都是不必要的边缘信息,而且检测到了在根茎叶旁边的一些虚假边缘,本文算法提取的边缘没有虚假边缘,而且比较清晰有效.图6可以明显的看出,用前2种方法对Lena图像进行边缘提取时,Lena的眼睛、鼻子、嘴和帽子的修饰部分提取的边缘信息不准确,而且混杂现象比较严重,提取出来的边缘信息很多都是不必要的,所以图像显得混乱.而用本文方法进行边缘提取时线条清晰连续,Lena的脸部轮廓比较清晰. 从以上实验结果可以得出,本文所采用的Canny算子与阈值分割结合的算法,检测到的图像边缘信息准确有效,同时相比较Canny方法和最小均方误差法更具有优势. 本文算法是在 Canny 算法的基础上,采用最小均方误差法得到Canny算法的高阈值和低阈值.此方法对图像的边缘检测较好,可以有效准确地提取图像边缘信息,还可以抵抗不必要的干扰和噪声.该方法对Canny 算法阈值选择是一个非常好地解决方案.通过实验得出,此方法对不同的图像都能较好地提取边缘信息,与传统 Canny 算法和最小均方误差法相比在边缘检测上更具有优势. 参考文献: [1] 李云红,曲海涛.数字图像处理[M].北京:北京大学出版社,2012:155-156. [2] 冈萨雷斯.数字图像处理:MATLAB版[M].北京:电子工业出版社,2005:290-293. [3] 赵芳,栾晓明,孙越. 数字图像几种边缘检测算子检测比较分析[J].通信与信息处理,2009,28(3):68-72. [4] 冯伍,张俊兰,苗秋瑾. 几种典型边缘检测算子的评估[J].电子设计工程,2011,19(4):131-133. [5] 李孟歆,侯丁丁,夏兴华,等.一种基于顶帽变换和 Otsu 阈值的轨道边缘提取方法[J].集成技术,2013,2(6):51-53. [6] 胡蓓,隆霞,胡超,等.改进脉冲耦合神经网络及二维Otsu算法的光伏阵列阴影检测[J].应用科学学报,2013,31(6):613-618. [7] 唐路路,张启灿,胡松.一种自适应阈值的Canny边缘检测算法[J].光电工程,2011,38(5):127-132. [8] 王小俊,刘旭敏,关永.基于改进Canny算子的图像边缘检测算法[J].计算机工程,2012,38(14):196-202. [9] 陈志强,高磊,吴黎慧,等.一种优化的Canny算子边缘检测法[J].电子测试,2011,6(23):43-46. [10] 宋莹,陈科,林江莉,等.基于图像分块的边缘检测算法[J].计算机工程,2010,36(14):196-200. [11] 梁靓,黄玉清.融合Canny算子和形态学方法的路径识别[J].计算机工程,2006,32(21):200-202. [12] 张铮,倪红霞,苑春苗,等.精通Matlab数字图像处理与识别[M].北京:人民邮电出版社,2013:256-258.2 Canny算子与阈值分割结合的算法
2.1 图像增强

2.2 最小均方误差法




3 结果与分析

4 结束语
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17 08:07:30
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
数学物理学报(2021年2期)2021-06-09 08:54:26
高技术通讯(2021年3期)2021-06-09 06:57:48
今日中国·法文版(2020年7期)2020-07-04 02:53:48
应用数学(2020年2期)2020-06-24 06:02:44
数学年刊A辑(中文版)(2018年2期)2019-01-08 01:59:54
自动化学报(2017年5期)2017-05-14 06:20:56
数学物理学报(2016年3期)2016-12-01 05:36:27
光学精密工程(2016年1期)2016-11-07 09:01:59
