
轮式移动机器人的主控制器设计
2014-06-24 08:13天津电气科学研究院有限公司王欢王玉博尚萌王诗祺李雪飞
电气技术与经济 2014年5期
天津电气科学研究院有限公司 王欢 王玉博 尚萌 王诗祺 李雪飞
0 引言
移动机器人技术涉及到机器人的导航与定位、路径规划、运动控制等,它集中了传感器技术、信息处理、电子工程、计算机技术、自动化控制工程以及人工智能等多学科的研究成果,代表机电一体化的最高成就,是目前科学技术发展最活跃的领域之一。对移动机器人控制系统的研究更是国内外对移动机器人研究的重中之重,本文针对移动机器人控制系统的搭建主要完成完成主控制器界面设计,主控制器软件目的是更好地监测机器人的运动状态,使机器人能够自动避障及目标定位。
1 轮式移动机器人的主控制器设计
1.1 移动机器人总体结构
本设计选用的机器人为双轮差速驱动移动机器人,控制器采用笔记本电脑,由串口通信向机器人其他硬件发送接收信息,执行器为机器人的双轮,传感器有摄像头传感器,超声波传感器,霍尔测速传感器,电机的运动通过电机驱动板控制,传感器通过串口与控制器通信。系统框图如图1所示。

图1 机器人硬件框图
1.2 控制器软件功能设计
移动机器人的驱动机构为车轮,传感器包括超声波传感器等,控制器部分的硬件包括两层:下层是传感器及电机控制板、上层是主控制器。
软件功能设计:核心控制器软件主要负责控制机器人进行运动及进行运动信息和超声波数据的显示,其核心控制器还包括对超声波数据的处理,使其能够进行自动避障;软件界面获取用户信息进行相应处理通过串口向下层传感器及电机控制板发送信息指令,当下层传感器及电机控制板返回信息时,控制器软件同时进行相应的处理,把相应的有用信息提取出来显示在控制器界面上,并利用其进行避障运算。
2 移动机器人避障算法
运动学是对机械系统如何运行的最基本的研究。在移动机器人学中,我们必须了解机器人的机械行为以正确的设计特定任务的移动机器人,并针对一个机器人的硬件实例,学会如何创建控制软件。
2.1 机器人运动学模型
移动机器人的运动学模型是最直观的模型,它直接描述了系统位置和机器人速度之间的关系,运用物理学运动分析方法,容易得到移动机器人的运动学模型[1]。

其中(x,y,φ)是移动机器人在全局的位置和角度,u1和u2是移动机器人在全局坐标下移动的线速度和角速度。移动机器人在全局坐标系下沿X轴方向的线速度,当移动机器人沿着X轴正方向运动时其值为正,沿着X轴负方向运动时其值为负。为移动机器人在全局坐标系下沿Y轴方向的线速度,当移动机器人沿着Y的正方向运动时其值为正,沿着Y负运动方向时为负。为移动机器人在全局坐标系下的角速度,当移动机器人逆时针转动时其值为正,顺时针转动时为负。通过这个运动学模型,我们可以很容易得出机器人的轨迹。
2.2 移动机器人的动力学模型
移动机器人的动力学模型(见图2)是最本质的模型,描述了系统速度、位置和加速度之间的数学关系,反映了力对机器人的位置和速度的作用。相对于运动学模型来说,动力学模型更加复杂,进而实时性比较差。并且,由于质量、转动惯量、摩擦力等不确定项的影响,为系统的描述带来了很大困难,使得动力学模型在控制效果上的模型优势降低。而且动力学模型由于质量等不确定项的影响,不具有通用性[2]。在这里直接写出移动机器人的动力学模型[3]。
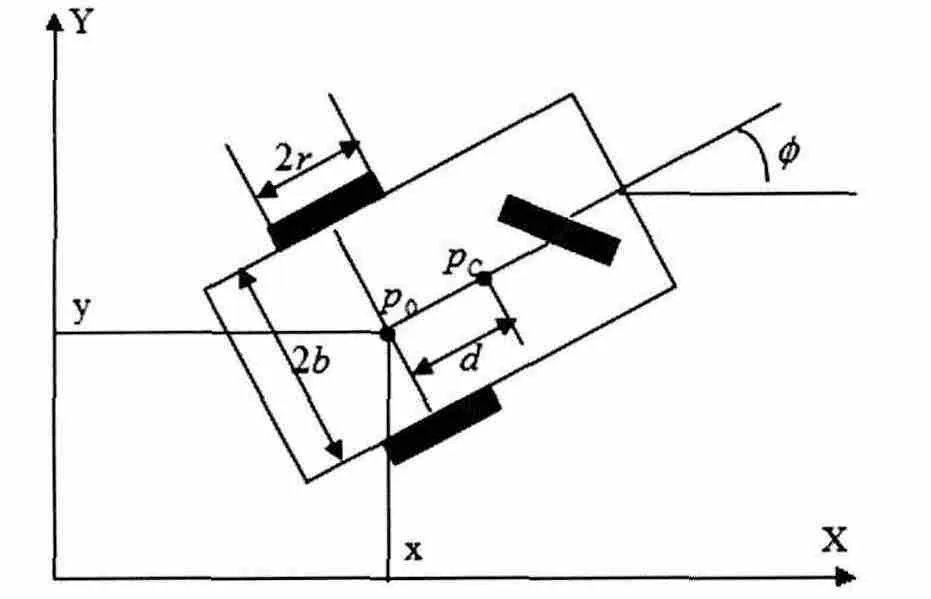
图2 机器人运动学模型
移动机器人的动力学模型是:

其中

b是移动机器人的宽度的一半,r是移动机器人轮子的半径,d是移动机器人的重心pe和左右两个轮子的中间点p0之间的距离,me为移动机器人的质量,mw为电机轮的质量,Ie是机身的惯性对过pc的垂直轴的力矩,Iw是电机轮对轮轴的力矩,Im为电机轮对车轮直径的力矩。正数dii,i=1,2是阻尼系数,(x,y)是移动机器人在全局坐标系下的位置以及角度,v1,v2是移动机器人左右两个轮子的角速度,v1,v2是给轮子的控制力矩。
2.3 基于虚拟力的机器人避障算法
基于阻抗控制概念的避障策略:当机器人探测到前进道路上有障碍物时,利用阻抗控制的概念[3],将追踪的目标调整到一个虚拟的位置[4],从而使机器人能够避开障碍物。阻抗控制需要实时地反馈机器人和环境之间的作用力。移动机器人与障碍物之间的相互作用通过虚拟力f(t)表示,f(t)的大小是机器人和障碍物距离d的函数,方向指向机器人。因为阻抗控制考虑的是移动机器人运动方向上的作用力,所以 f(t)在机器人运动方向上的径向分量ft(t)被用来确定目标调整角度ψ的大小,与机器人运动方向垂直的切向分量fr(t)则被用来确定目标调整的方向(顺时针或逆时针) ,即

式中:为一个和ft(t)相关的辅助变量,当f(t)趋于零时, 也相应地趋于零;为当前期望的目标位置,调整后的目标位置xr=[xryr]通过将xd旋转角度而得到。
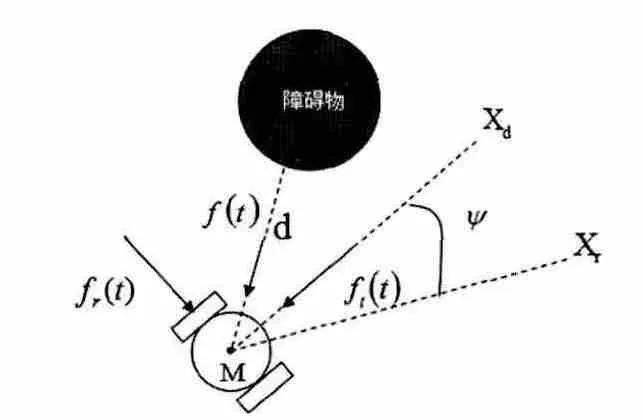
图 9 虚拟力示意图
阻抗控制算法:虚拟力 的定义采用文献[6]的线性函数的形式,即

式中,a和b为正的常数且满足a-b(dmax-dmin)=0 , dmax和 dmin分别为超声传感器能够探测到的最大和最小距离; 为t时刻超声传感器探测到的障碍物距离,显然dmin≤d(t)≤dmax。期望的阻抗关系定义为线性的动力学关系[5]

式中,B和K为正的常数,分别表示移动机器人与障碍物相互作用的阻尼系数和弹性系数。那么,辅助变量的定义就是

将r(t)带入式(2),计算得到目标点相对于机器人中心的旋转角度ψ。新的目标点的位置xr通过旋转xd得到

障碍物距离机器人越近,虚拟力也就越大,目标调整的角度也越大,以使机器人能够避开障碍物。当机器人远离障碍物时,虚拟力逐渐变为零,同时f(t)=0,Υ=0 ,ψ=0,使得xr=xd,移动机器人继续向指定目标前进。
3 结束语
本文系统的介绍了机器人控制系统的搭建,研究了机器人主控制设计,主控制器通过串口与底层机器人控制板相连,向其发送控制电机速度和超声波触发及读取指令。并介绍了机器人运动学模型和基于虚拟力的超声波避障算法,给机器人后续的开发研究打下基础。在实验中,机器人控制器软件能够很好的控制机器人运动和信息采集。控制器程序能够成功的控制机器人的运动和数据监控,为以后机器人更加复杂功能的研究奠定基础。
[1]唐述博.非完整移动机器人点镇定和轨迹跟踪控制研究[D].大连:大连理工大学,2005.
[2]蒋新松.机器人学导论[M].沈阳:辽宁科学技术出版社,1993.
[3]T.Kukao,H.Nakagawa,N. Adachi.Adaptive tracking control ofnonholonomic mobile robot, IEEE Trans. Robot. Automat vol.2000:16,609-615.
[4]殷跃红,朱剑英.智能机器人视觉及力控制研究综述[J].航空学报,1999,20(1):127.
[5]Carelli R,Freire EO. Corridor navigationandwall-following stable control for sonar-based mobile robots.Robotics and Autonomous Systems,2003,45:2352-247.
[6]Borenstein J, Yang K. The vector field histogram-fast obstacle avoidance for mobile robots. IEEE Transactionson Robotics andAutomation,1991-17(3):278-288.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
河北省科学院学报(2020年1期)2020-05-25
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年3期)2017-06-23
海军航空大学学报(2015年1期)2015-11-11
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
