一种低成本调相式SVPWM控制器设计
2014-06-19 09:09:32张无量庞小虎
微特电机 2014年4期
张无量,李 辉,庞小虎
(电子科技大学,成都,610054)
0 引 言
目前,永磁同步电机调速及高性能伺服技术发展迅速,矢量控制及直接转矩控制等方法都较为完善,使交流调速控制有了突破性的发展[4]。在控制电机的三相逆变器中,空间矢量脉宽调制(SVPWM)和正弦脉宽调制(SPWM)是两种常见的调制方式。SPWM首先被采用并一直沿用至今,虽不断完善,效果显著,但仍存在直流电压利用率不高、低速转矩脉动大、高频开关损耗大等不足[9]。而由德国学者Van Der Broeck H.W 提出的 SVPWM 技术[6]与 SPWM相比,具有电压利用率高、损耗低、响应快、易于数字化实现等优点,近年来得到了广泛的研究和应用。文献[10]针对逆变器在输入直流侧电压不稳定的应用场合,运用改进的SVPWM,减小了输入直流侧纹波对输出电压的影响;文献[11]表明采用恰当的开关模式可以降低SVPWM控制器的EMI;文献[12]使用新的扇区判断方法减少了三角计算,提高了运算速度。本文通过对SVPWM的核心分析,针对驱动相位的精确度提出了相位差动态调节的方法,以STM32F103为控制核心,完成了整个系统的软硬件设计,并在此基础上提出了霍尔位置自动校准的方法,取得了良好的控制品质。
1 调相式空间矢量脉宽调制算法设计
SVPWM算法中驱动相位的精准度对伺服系统的控制性能至关重要,因此本文在传统SVPWM算法的基础上针对相位进行了优化,使电机运行过程中驱动相位的精准度更高,取得了更好的控制效果。主要流程如图1所示。
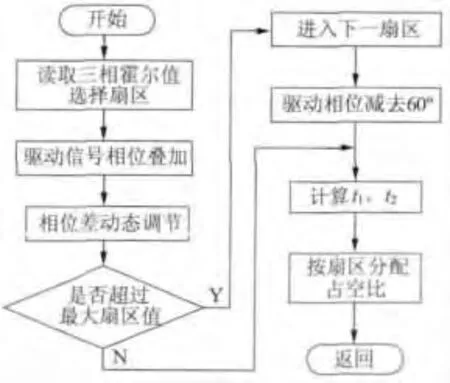
图1 SVPWM算法主要流程图
对于任意位置的空间电压矢量,根据秒伏平衡原则,可以由6个基本空间矢量中的某两个来合成,这是通过调节逆变器在相应工作状态上的持续时间来实现的,如下:
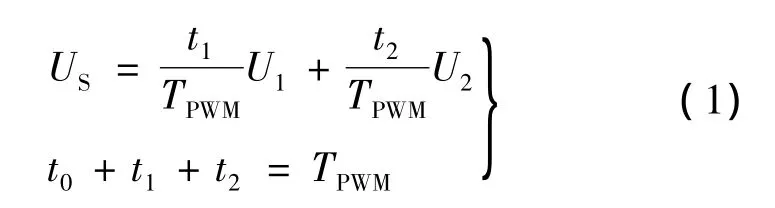
式中:TPWM是调制采样周期;t1,t2是逆变器工作在状态1、2的时间;t0为零矢量U0的作用时间。
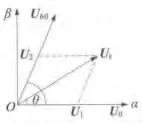
图2 Us在0°<θ<60°扇区合成原理
基本空间电压矢量上的工作时间可以根据投影关系确定。由正弦定理得:
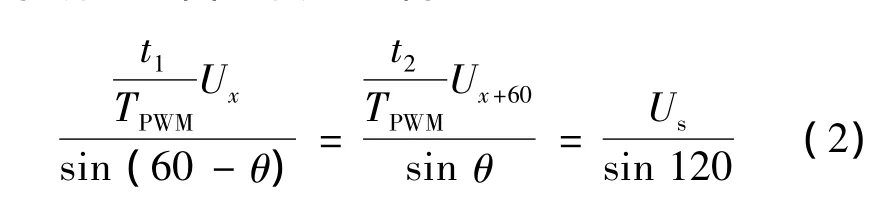
θ表示US与U0的夹角。由式2可得相邻两个基本空间矢量上的工作时间:

在一个完整的调制周期TPWM内,除了t1和t2的导通时间外,其余为自由轮换的零矢量状态T0。因此SVPWM有输出约束:

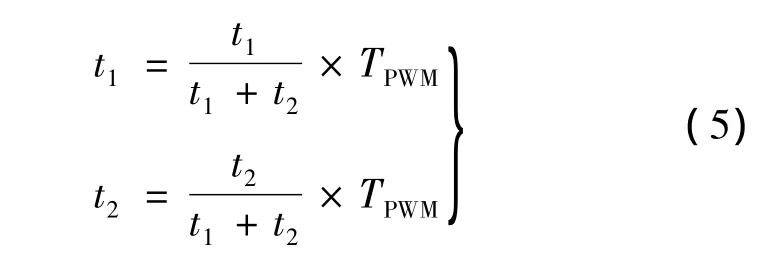
如果t1+t2>TPWM,为避免过调制,则按下式处理:
调相式SVPWM主要通过以下4个步骤来实现。
1)由霍尔信号值获取扇区号。
系统在设计上使三相霍尔信号值与扇区号保持一致,扇区号计算公式:

2)计算驱动相位。
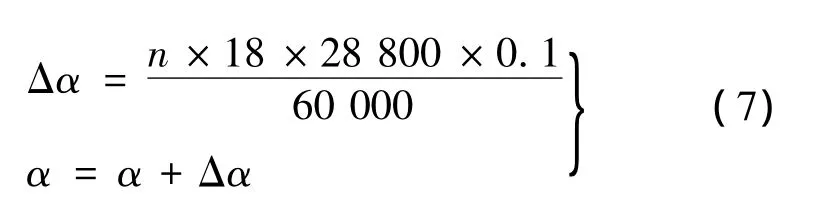
测试电机的极对数为3,三只磁敏式霍尔传感器按相差120°安装,则电机每转过20°机械角度也即60°电角度后霍尔信号会发生高低电平的改变。采用双边沿中断,则电机旋转一周会产生18次霍尔中断。为提高运算精度,并与正弦函数表对应,将电角度线性扩大480倍,即0~28 800偏移值线性对应0°~60°电角度,计算公式如下:
当α超过60°以后,扇区S自动进入下一扇区,同时将α减去60°,然后继续叠加。但是在下一个扇区的霍尔中断到来之前,限制α的值不超过此时的相位超前角。同时,为了提高相位精度,系统在此使用了相位差动态调节的方法对其进行了优化。
3)根据扇区号来确定相应的基本空间矢量工作时间t1和t2。
综合考虑系统的精度要求和STM32微处理器的RAM容量及代码执行效率,本文将0°~60°电角度均分成480份制成正弦函数表。当电动机工作于第I扇区时,由式(3)可以推导出相邻基本空间电压矢量上的作用时间,如下:

其他各扇区均可转换到该扇区来求取作用时间t1和t2。UPI为系统PI控制器的输出,其范围位于区间[0,1]。
4)占空比的计算与分配。
设变量 tA、tB、tC,令:
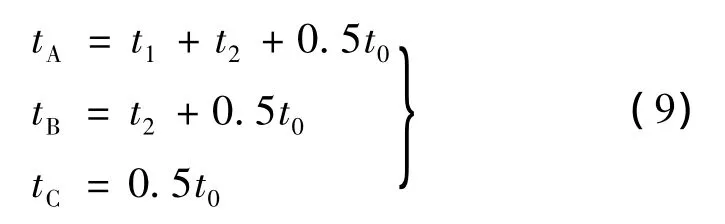
式中:t0表示零矢量的作用时间,其大小为(TPWM-t1-t2)/2。
控制器采用中心对称的互补输出PWM调制模式。遵循使用最少开关次数、减少开关损耗的原则,系统采用比较通用的中心对称七段式SVPWM方法,定时器比较值CCR赋值如表1所示。
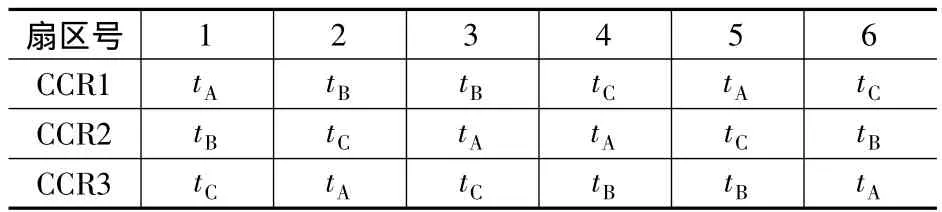
表1 定时器CCR赋值表
1.1 相位差动态调节
驱动信号相位和电机转子位置的契合程度直接决定了SVPWM调制性能的高低,本文的关键点就在于采用了相位差动态调节的方法对驱动信号相位进行了优化。
理想的情况是驱动信号相位和电机实际位置同步,但在实际应用中会出现两种情况:一种是驱动信号超前于电机实际位置,我们称之为相位超前;另一种是驱动信号滞后于电机位置,称之为相位滞后。本系统分这两种情况对其进行了优化。
(1)相位超前:当驱动信号超前转子位置过多时,会对SVPWM调制带来严重影响,尤其是当超前角度达到扇区临界点时将导致电机反转,这是绝对不能允许的。因此,当相位超前过多时,SVPWM程序模块将停止驱动信号相位叠加,同时速度环加大幅值输出,迫使转子转速增加,直到转子位置回到驱动信号允许的相差范围以内。
(2)相位滞后:当驱动信号相位稍微滞后于转子位置一定角度,在一定范围内可以容忍,但是随着滞后角度增大,电源对电机的驱动能力将越来越小,驱动效率越来越低,甚至出现负转矩来强制转子转速降低,并且当转子由于惯性转过负转矩最大临界值点时,电机会快速地多转过一个霍尔周期角度,这不仅严重影响SVPWM调制的性能,还对速度环调节产生了不利影响,因此当相位滞后角度达到容许的界限时,PID程序模块便减小速度环的幅值输出,直到电机实际位置回到驱动信号允许的相差范围内。
系统采用线性预测的方式获取转子位置,具体方法是通过上一个霍尔位置和当前霍尔位置的时间差来确定当前转速,并利用该转速来预测转子在扇区内的位置,因此相位超前和相位滞后的判断依据分以下两种情况:
(1)SVPWM驱动信号达到预期角度,但没有收到霍尔中断,这种情况为相位超前。当收到霍尔中断时,此时的驱动相位角度与霍尔中断处的理论角度之差即为相位超前角度值。这时要求驱动信号相位继续增加,直到达到最大容许相位超前角。此时为了防止电机反转,SVPWM程序模块必须停下来等待机械转子,电机实际上工作于同步模式。同时,为了防止电机堵转,导致霍尔位置永远都到不了,当相位超前以后,由系统定时器不断增加驱动电压,促使电机转矩不断增加。
(2)程序接收到霍尔中断,但SVPWM驱动信号没有达到预期角度,此时表现为相位滞后,滞后角度具体数值可以由霍尔中断处的理论角度减去当前SVPWM驱动角度来得到。
2 霍尔位置自动校准
由于霍尔传感器均存在安装误差,使得调相式SVPWM在相位调节过程中存在较大的相位误差。相位误差的出现,将导致驱动信号畸变,使电机系统谐波分量损失严重,效率降低。霍尔位置的误差,也会导致测量转速时的离散误差较大,引起速度调节环路不稳定。为了解决此问题,本文使用了一种自动校准霍尔位置信号的方法,使每次霍尔中断时的转子位置更加准确,调相精度更高,进而实现了更好的控制品质。
霍尔位置自动校准的方法如下:
(1)用带精准光电编码器的转台与电机同轴转动,设一初始相位001为0°;
(2)当下一霍尔相位到来时,记录光电编码器的实际角度;
当霍尔状态011来临时,记录光电编码器角度为α1;
当霍尔状态010来临时,记录光电编码器角度为α2;
当霍尔状态110来临时,记录光电编码器角度为α3;
当霍尔状态100来临时,记录光电编码器角度为α4;
当霍尔状态101来临时,记录光电编码器角度为α5;
当霍尔状态001来临时,光电编码器角度回到0°;
(3)将以上α1~α5储存在程序里,如此重复10次,取各自的平均值记为 θ1、θ2、θ3、θ4、θ5;
(4)程序正常运行时,当霍尔中断到来时,不再认为其位置角度为 0°、60°、120°、180°、240°、300°、360°,而将其修正为 0°、θ1°、θ2°、θ3°、θ4°、θ5°。
实验表明,使用霍尔位置自动校准以后,测量转速时的离散误差减少,测速更加准确,速度调节环路更加稳定;相位信号误差的减少,也使得 SVPWM调制性能更佳,效率更高。在满足永磁同步电机伺服系统需求的前提下,完全可以取代价格昂贵的光电编码器。
3 系统软设计及MATLAB仿真
3.1 系统软件设计
硬件电路为系统提供了可靠的运行平台,但是系统控制策略和很多功能的实现则主要依赖于软件的设计。系统采用C语言编程,软件实现的功能主要有:
(1)SVPWM调制;
(2)检测霍尔传感器,实时计算转速和同步转子位置;
(3)速度、电流调节器的设计;
(4)处理各种异常,如过流、霍尔丢失、堵转等,并完成保护输出;
(5)辅助功能,如键盘读取、显示,与上位机通讯等。
软件主程序采用常见的死循环结构。系统上电复位以后,立即初始化系统并设置好各项参数,然后进入一个死循环中等待中断请求。主控芯片通过响应定时器中断、外部中断以及持续的AD采样来判定系统所处的状态,根据不同的工作状态选取相应的策略来实现对系统的控制。
要进行SVPWM调制,首先必须获取所需空间电压矢量US的相位和幅值。系统分别采用PWM中断和调速中断来获取这两个变量,而霍尔中断主要用来测速和同步扇区。
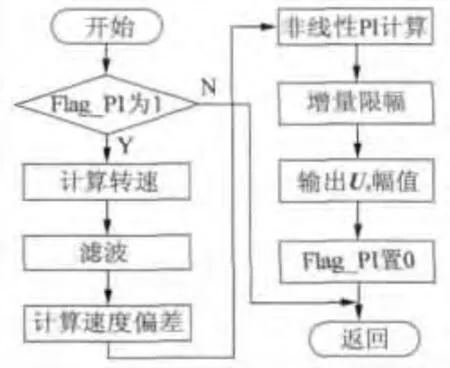
图3 速度调节流程图
PWM频率设定为10 kHz,PWM中断服务子程序如图1所示。首先,根据霍尔信号判定电机转子所处的扇区;然后利用当前转速计算驱动相位,计算公式如式7所示。由式(7)可知,电机转速最低可达1.2 r/min,有很好的低速性能。系统根据驱动相位和PI控制器输出的最新幅值,立即更新PWM占空比,从而实现SVPWM调制和PI调节。
3.2 系统仿真及测试
本文利用MATLAB/Simulink构建了PMSM伺服系统的仿真模型。其中SVPWM模块仿真模型如图4所示。
电机运行在5 000 r/min时的三相电流波形如图5所示,起动以后呈很好的正弦波形,这有助于抑制电机的转矩脉动。
本文使用额定功率550 W的工业缝纫机做了实际测试,测试设备为MTS-I电机测试系统,如图6所示。样机测试结果如图7所示,在额定点处,系统转速为4 930 r/min,输出功率为549.2 W,效率达到84.4%,达到了预期目标。由于系统采取了过流保护措施,当负载继续加大时,电流不能随之继续增大,因此迫使电机转速下降。当输出转矩达到3N·m时,电机转速尚在3 100 r/min以上,输出功率为986 W,功率裕量很大,这对系统稳定性很有帮助。
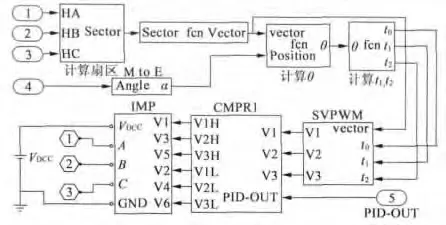
图4 SVPWM仿真模型
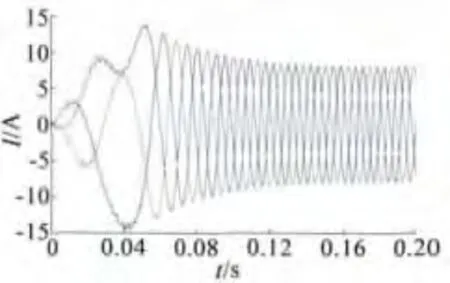
图5 三相电流波形

图6 MTS-I电动机测试环境
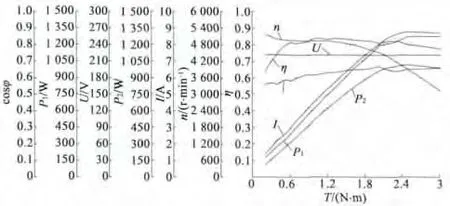
图7 样机测试结果
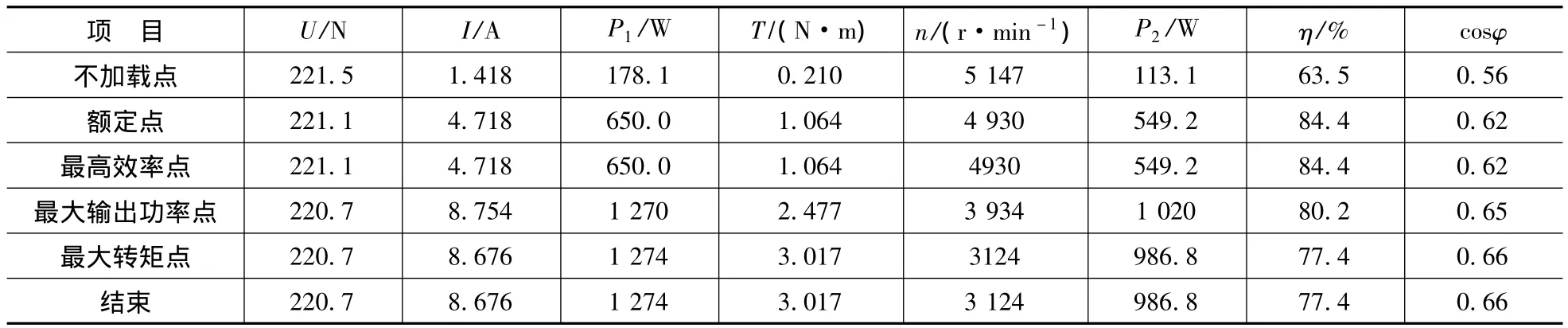
表2 样机测试结果
4 结 语
本文设计实现了一套低成本的PMSM控制器,根据SVPWM的基本原理,使用相位差动态调节的方法对驱动相位进行了优化,同时使用霍尔位置自动整定的方法对硬件电路的不足给予补偿,并且通过仿真和工业缝纫机伺服控制测试表明,本系统取得了良好的控制品质,有很好的应用前景。
[1]黄腾云.采用霍尔传感器的PMSM低成本控制系统[J].微特电机,2012,40(01):20 -21.
[2]徐传芳.新型SVPWM调制方法研究[J].微特电机,2012,40(07):72-75.
[3]于兆凯.基于STM32的永磁同步电机伺服系统的研究[D].杭州:浙江大学,2012.
[4]孙立志.PWM与数字化电动机控制技术应用[M].北京:中国电力出版社,2008:17 -22,175-190.
[5]方斯琛等.新型无扇区空间矢量脉宽调制算法[J].中国电机工程学报,2008,28(30):37 -42.
[6]VAN DER BROECK H W,SKUDLENY H C,STANKE G V.Analysis and realization of a pulsewidth modulator based on voltage space vectors[J].IEEE transactions on.Industry Applications,1988,24(1):142 -150.
[7]刘金琨.先进PID控制及其MATLAB仿真[M].2版.北京:电子工业出版社,2003:30-34.
[8]吴瀛喆.数字式工业缝纫机控制器的研究与设计[D].成都:电子科技大学,2013.
[9]张成.SVPWM与SPWM比较仿真研究[J].机械与电子,2013,(01):5-9.
[10]SHIREEN W,VANAPALLI S,NENE H.A DSP based SVPWM control for utility interactive inverters used in alternate energy systems[C]//APEC’06.IEEE,2006:5.
[11]KIM Lee - Hun,YU Jae - Sung,LEE Won - Cheol,et al.A noval PWM switching technique for conducked EMI reduction in fieldoriented control of an induction motor drive system[C]//Industrial Electronics Society,IECON,31st Annual conference of IEEE.2005.
[12]PEROUTKA Z,GLASBERGER T.Comparison of methods for continuous transition of space vector PWM into six-step mode[C]//Power Electronics and Motion Control Conference.2006:925-930.
猜你喜欢
南北桥(2022年2期)2022-05-31 04:28:07
电脑知识与技术·经验技巧(2017年9期)2018-02-24 19:55:20
时代英语·高二(2017年4期)2017-08-11 11:54:16
解放军健康(2017年5期)2017-08-01 06:27:44
童话王国·文学大师班(2017年6期)2017-07-10 05:54:07
西南交通大学学报(2016年4期)2016-06-15 20:29:36
计算机技术与发展(2016年10期)2016-02-27 00:44:08
太空探索(2015年6期)2015-07-12 12:48:42
世界科学(2013年6期)2013-03-11 18:09:39
赤峰学院学报·自然科学版(2012年19期)2012-10-14 02:54:02