基于LabVIEW与DSP的电机调速系统在光声图像采集中应用
2014-01-31 09:02:32白晓淞周俊赵
微特电机 2014年4期
郑 胜,白晓淞,周俊赵
(1.桂林电子科技大学,桂林541004;2.中科院深圳先进技术研究院医工所,深圳518052)
0 引 言
光声成像是国际上新发展的一种无创在体生物医学成像技术,具有高分辨成像能力和成像深度,表现出巨大的应用前景,并得到迅速发展[1]。而光声成像系统的成像质量对拖动电机和扫描电机控制有着较高的要求,它不仅要求多模成像系统扫描图像电机速度保持稳定,而且其上位机程序要集成到上位机图像采集与数据处理主系统中去,并要实现图像采集的速度可调。基于此,本文设计了基于Lab-VIEW与DSP的电机调速系统,采用串口通信的方式,实现上位机LabVIEW与控制器DSPTMS320F2812的通信,DSP通过控制算法实现电机速度的稳定控制。
1 系统硬件构成及通信设计
1.1 硬件构成
基于LabVIEW与DSP的电机调速系统主要分为三部分,第一部分是基于LabVIEW的上位机,用来发送和接收速度值;第二部分是伺服控制器DSP,主要功能是接收RS232串口速度指令,采集转速、电流信号采用控制算法加以实现;第三部分为电机驱动模块、光电编码器、电机等。这里电机为富士GYS201D5-RC2三相交流电机,光电编码器为2500线的多摩川增量式光电编码器TS2604N321E64,控制芯片选用DSP TMS320F2812,晶振为30 MHz,通过锁相环倍频为150 MHz。其原理图如图1所示。

图1 系统硬件结构图
1.2 通信方式设计
通信方式采用SCI串行口通信,其参数设置如下:波特率为19 200 b/s,8位数据位和1位停止位,无奇偶校验位,上位机LabVIEW与DSP通过RS232串口半双工通信来完成接收和发送数据。DSP上电后等待激光器的初始化,当激光器完成初始化并激发换能器后,基于LabVIEW的上位机程序发送速度命令,DSP收到速度命令后驱动拖动电机和扫描电机以恒定的转速带动光纤和扫描探头旋转,当完成了规定扫描范围的n帧图像数据采集后,LabVIEW自动发出停止命令,DSP通过反接制动控制电机停止扫描。DSP作为控制器实现对上位机系统速度值的接收和对电机转速的稳定控制。
2 基于LabVIEW的上位机程序
虚拟仪器是一种基于计算机软件的仪器系统,广泛应用于生物医学工程、自动化仪器仪表、机器人视觉、工业控制与检测等。虚拟仪器技术在医疗装备中主要的应用有医学信号的数据采集和分析、医疗装备系统的控制及远程医疗系统等[2]。VISA作为虚拟仪器编程的标准I/O的API,是LabVIEW实现程序通信的底层模块,其独立于操作系统,可根据使用仪器的类型来调用相应的程序,无需学习各种仪器的通信协议,是一个用来在串口通信设备、VXI或PXI设备、USB设备、GPIB设备以及其他基于计算机设备间通信的函数库[3]。上位机串口通信部分程序如图2所示,这里串口通信程序总体架构是基于生产者与消费者循环来实现的,通过对VISA的功能模块进行配置和调用来完成。首先是创建用户注册事件和对串口的初始化配置等,配置参数要与DSP的SCI串口初始化的程序时的设置一致;其次在while中循环的读取和写入速度值,并产生相应动态的注册事件来停止或重新发送数据。
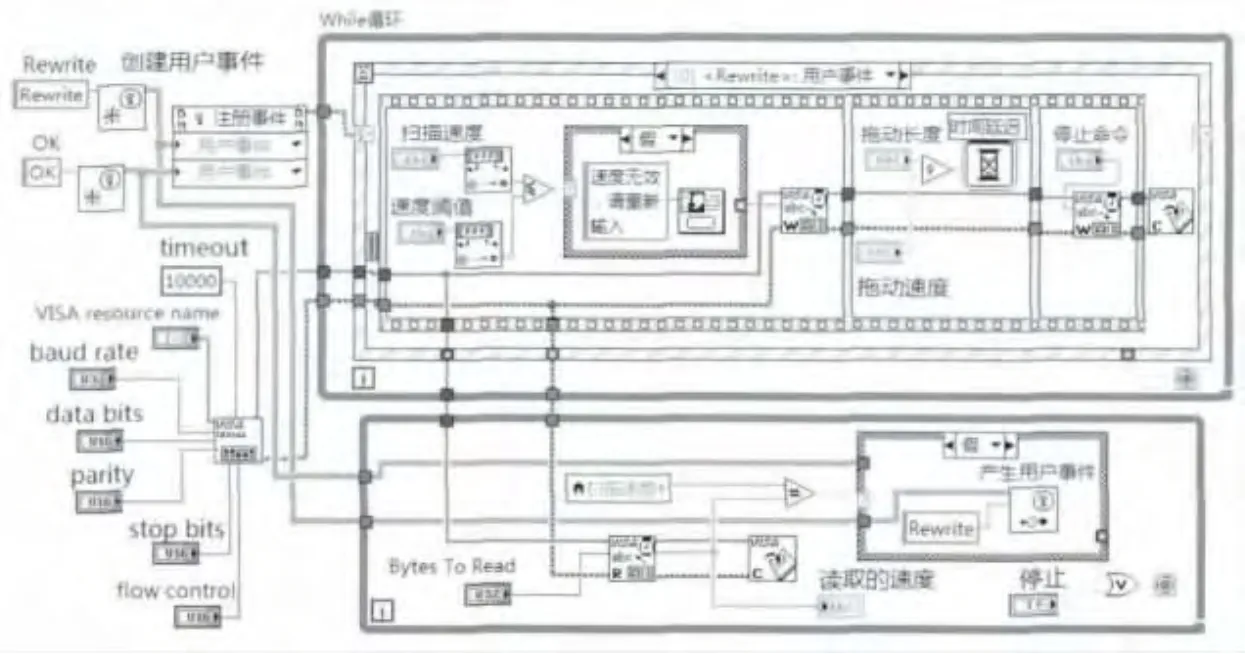
图2 上位机通信部分程序面板
为避免发送出错,采用注册动态事件方式检查发送的数据帧与DSP回传的数据帧是否一致,一致则认为发送成功,超时则停止,其他情况则采用默认注册事件方式重新发送,这样保证数据传输的可靠性与准确性。
3 基于DSP的控制器设计
控制器C程序在CCS环境下编写,主要包括主程序、参数初始化子程序(时钟、看门狗、SCI串口、AD模块、事件管理器模块、GPIO口定义模块、EQEP模块)、串口中断服务及控制算法的实现程序等。
1)数据的接收和发送。在标准SCI模式下通过中断方式来接收和发送数据,分别为数据接收区和数据发送区,用来存放LabVIEW发送来的数据帧和单片机要发送给LabVIEW的响应数据帧[4]。当接收中断发生时,DSP将串口发送来的控制值通过中断函数SCIRXINTA_ISR装入数据接收区,由于Lab-VIEW从串口发送过来的数据值为ASCII字符形式,因此转换为控制的速度值时一定要转换为无符号的整型数,每一个ASCII码字符与其整型数相差48。当进入发送中断单片机将发送区的数据通过SCITXINTA_ISR中断函数发送给上位机并判断发送的控制值是否正确,不正确则上位机重新发送。
2)由于在图像采集的电机调速过程中要求电机调速迅速、平滑,因此速度跟随要越快越好。此外,由于负载变化和系统受到扰动时,系统的开环速度控制并不能消除速度值与期望值的偏差,这样就会导致图像采集的线数出现偏差或是不均匀,因此,系统采用速度闭环控制以提高系统的快速性、稳定性和抗干扰的能力,其中速度给定值由上位机Lab-VIEW发送并由DSP串口接收,速度测量值采用M法测速,即由光电编码器采集的脉冲信号送到DSP专门的EQEP口并与定时器值结合计算得来。虽然系统的控制目的是对电机转速的稳定精确控制,但是仅对速度的控制是不能达到扫描电机的精确速度控制和快速启停的,电机的控制本质就是转矩的控制,因此对转矩的控制显得尤为必要,而转矩在电机电流不超过其额定值时,转矩与电机的电流几乎成正比,所以要控制好转矩就是要控制好电机的电流。这样通过对电枢电流的闭环控制不仅可以减少谐波成分和转矩脉动,而且在快速启停时,避免了速度调节器出现饱和,使系统获得最大的加减速,此外通过电流饱和阈值限制避免了过载电流的出现,具有良好的静态特性,而且电流环是内环,其闭环控制要比速度控制快得多,通过对电流的闭环控制明显提高了系统的动态跟随性能和抗干扰能力[5],所以系统采用的是双闭环控制,串联连接,内为电流环,外为速度环,这样就可以实现电机的在线调控。其控制算法框图如图3所示。
3)主程序完成初始后,等待中断发生,当中断发生时,DSP TMS320F2812作为控制核心,接收到上位机发送的速度值和采集相电流值和计算实际转速值,通过PI控制算法,采用电压空间矢量SVPWM[6]技术,经高速光耦隔离后来控制三相电压源逆变器功率开关管的开关状态和顺序组合以及开关时间的长短,经桥式模块驱动电机实现调速控制。伺服电机的电流通过AD采样送入DSP的IO口,转速信号则通过EQEP口反馈给DSP,形成对电机的双闭环PI控制。系统电磁转矩稳定,母线电压利用率高,易于数字化控制;上位机通过USB转RS-232串口发送调速指令,完成对电机速度的在线调控,其程序流程图如图4所示。

图3 控制算法框图

图4 程序流程图
4 实 验
硬件连接好后,当上位机发出控制速度1 800 r/min时,电机转速运行达到1 800 r/min,运行平稳,当完成规定的扫描长度后,上位机自动发出停止命令,电机也能迅速停止,扫描完成。当转速为1 800 r/min时,用逻辑分析仪测得同一桥臂上下两个开关管的PWM驱动波形,如图5所示。
从示波器中观察单相桥臂的电压波形和电流波形如图6所示。波形1为电压波形,波形2为电流波形,近似为周期正弦信号,谐波成分小,这与理论相吻合,说明整个系统已达到了预期的效果,具有良好的动静态性能。

图5 同一桥臂的PWM驱动波形

图6 单相桥臂的电压波形和电流波形(截图)
5 结 语
本文利用LabVIEW强大的串口通信功能和DSP优越的电机控制性能,完成了对光声图像采集系统中扫描电机速度的快速稳定精确控制。运行结果显示在线调速时间短,速度控制稳定准确,具有良好的操作性能和控制性能,为成像系统提供了一种利用LabVIEW控制电机扫描速度的方法,实验证明其运行稳定可靠,具有一定的应用价值。
[1]陶超,刘晓峻.生物医学光声成像的研究进展[J].应用声学,2012,31(6):8-9.
[2]饶程,熊兴良.虚拟仪器技术及其在医学信号采集中的应用[J].医疗卫生装备,2004(3):12-15.
[3]朱建平,吕春峰.基于LabVIEW的单片机串口通信实现[J].机械工程与自动化,2008.
[4]顾卫钢.手把手教你学 DSP——基于 TMS320X281X[M].北京:北京航空航天大学出版社,2011.
[5]赵立新,丁筱玲,刘双喜.转速、转子电流双闭环控制变频调速器[J].农业机械学报,2002,33(2):135.
[6]周有为,刘和平,杨利辉.基于TMS320F2812的SVPWM的研究[J].电气传动,2005,24(2):98-101.
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:39:12
车迷(2018年12期)2018-07-26 00:42:22
制造技术与机床(2017年6期)2018-01-19 02:41:07
中国老区建设(2016年3期)2017-01-15 13:53:26
山东工业技术(2016年15期)2016-12-01 05:31:14
通信电源技术(2016年5期)2016-03-22 01:10:02
地矿测绘(2015年3期)2015-12-22 06:27:26
学习月刊(2015年3期)2015-07-09 03:51:04
电源技术(2015年9期)2015-06-05 09:36:06
机械制造与自动化(2014年1期)2014-03-01 04:21:55