
局部状态检测的GPS/INS组合导航转发式干扰检验方法
2014-06-15 17:34:46朱立新马春来
火力与指挥控制 2014年10期
朱立新,孟 ,王 江,马春来
(1.解放军电子工程学院,合肥 230037;2.电子制约技术安徽省重点实验室,合肥 230037)
局部状态检测的GPS/INS组合导航转发式干扰检验方法
朱立新1,2,孟1,2,王 江1,马春来1,2
(1.解放军电子工程学院,合肥 230037;2.电子制约技术安徽省重点实验室,合肥 230037)

GPS/INS组合导航,转发式干扰,局部状态,χ2检验
引言
GPS/INS(Global Positioning System/Inertial Naviga-tion System)组合导航系统克服了各自缺点,使组合后的导航精度高于两个系统单独工作的精度[1]。GPS转发式干扰是一种通过转发虚假时延信号,欺骗接收机定位的手段[2]。一旦GPS接收机锁定虚假信号的载波及码环,接收机在“无意识”中对错误的信号进行解算,从而产生错误的定位信息。对于GPS/INS组合导航系统而言,GPS接收机部分一旦被成功欺骗,整个系统的导航数据将被污染,并输出错误的定位信息。
GPS转发式干扰是非合作式的,干扰带来的噪声难以用建模的方法进行滤除。因此,可考虑采用故障检测的方法判断系统是否受到诱偏干扰,并剔除受到干扰的数据。
本文在介绍转发式干扰基本原理的前提下,提出局部状态χ2检验的方法,验证了该方法的可行性,并且通过仿真实验进行了验证,结果表明该方法能够有效检测GPS转发式干扰。
1 GPS/INS组合导航系统非线性模型
1.1 状态方程
以导航参数误差量为状态变量,建立GPS/INS组合导航系统状态方程,误差较小,变化率较低,使每一步迭代中,滤波器能够在更长的时间内进行状态估计,易于满足导航中对实时性的要求。其状态方程如下:
其中φE、φN、φU分别为平台东、北、天误差角,δvE、δvU、δvN为系统东、北、天向速度误差,δL、δλ、δh为当地坐标系下地位置误差,εbx、εby、εbz为陀螺常值漂移,εrx、εry、εrz为陀螺随机漂移,Δx、Δy、Δz为加速度计零偏,δtu为GPS钟差等效距离,δtru为时钟频差等效距离变化率,F(t)是状态转移矩阵,G(t)为噪声系数矩阵,W(t)为噪声向量,由于过于复杂不再展开,可参见文献[3]。
1.2 量测方程
以伪距作为观测量,结合星历数据输出量测更新值,建立量测方程。GPS接收机解算得到卫星j之间的伪距可表示为[3]:

可得式(3):

其中λI、LI、hI分别为惯导输出的载体在地球大地坐标系中的经度、纬度及高度。量测方程如下:

2 GPS转发式干扰基本原理
GPS转发式干扰是通过转发信号的时延控制及同步算法,使得被干扰目标偏离原有轨迹,从而实现对GPS接收机及其载体的运行轨迹控制的技术手段[4-5]。图1所示即为典型的单站转发多信号的基本原理。其原理是:在A点部署干扰机,通过转发较大功率的带有一定时延的GPS信号,将干扰机有效区域内的任一C点的接收机诱骗至B点,使该区域内的接收机在“无意识”状态下解算出错误的位置与授时信息[6]。

图1 GPS转发式干扰原理
设干扰机所在A点坐标为(xA,yA,zA),解算得4颗卫星S1、S2、S3、S4的伪距为ρ1A、ρ2A、ρ3A、ρ4A。A点干扰机的授时误差为A,则A点的GPS位置方程可写为:
GPS转发式干扰诱偏下,目标接收机同时收到来自卫星及干扰机的信号。由于干扰机转发的干扰信号强度比GPS卫星的信号强度强得多,加之前期进行的大功率白噪声压制干扰,信号很容易解锁。信号解锁后,目标接收机则接收到干扰机发送的事先加入时延的GPS卫星信号[7]。设ρ1B、ρ2B、ρ3B、ρ4B为卫星至诱偏后映射的目标点B点的伪距,式(6)则为B点定位方程。

式(5)和式(6)做差可得时延控制方程:
3 基于局部状态的χ2检验方法
χ2检验方法是组合导航系统中一类应用最为广泛的故障检测方法[8]。它通过检验所构造的n维随机变量的均值及方差是否满足高斯分布来判断系统是否发生故障。按所构造的随机变量不同χ2检验可分为残差χ2检验法、状态χ2检验法、双状态χ2检验法。
其中残差χ2检验法利用当前量测值与量测值的一步预测之差建立故障检测函数,通过对残差的统计特性进行分析来确定系统是否发生故障[9]。这种检验方法对于突变的硬故障的检测效果较好,而对于缓慢变化的软故障难以及时检测出来。

状态χ2检验的方法能够较灵敏地检测出缓慢变化的软故障,适于检测GPS转发式干扰。但需要注意的是:若GPS干扰机有效实施了对组合导航系统中GPS接收机的欺骗干扰,在无虚警的情况下,一定能够判断出系统有故障;若判断出系统存在故障,并不能确定这种故障是由GPS转发式干扰造成的。换言之,GPS接收机受到欺骗干扰是判断系统发生故障的充分而非必要条件。另外,状态检验的方法不仅需要滤波器提供量测更新信息,还需要单独的“状态递推器”,这无疑增加了计算量,对于20维的状态进行χ2检验更是如此。
鉴于此,本文在分析故障变化特性与故障诊断函数特性之间的关系的基础上,提出了局部状态χ2检验。所谓局部状态χ2检验,是指仅采用对局部状态即xχ=[δtu,δtru]进行χ2检验。这种方法可以实现对转发式干扰的有效检测。下面将详细论证采用该方法的可行性。
3.1 观测值的变化


假设GPS接收机被欺骗后,锁定干扰机的码环,在C点提取出伪距:

3.2 系统观测模型的变化
在未受到转发式干扰的情况下,GPS/INS组合导航系统观测方程:
若受到加入伪距噪声的干扰,则模型在理论上应为:

3.3 χ2检验中的变化
前面已经阐述了转发式干扰加入的时延噪声与等效时钟误差校正距离的关系,下面将说明这种时延噪声对χ2检验的影响。为了方便描述,给出一般的量测更新方程:

式中,Zk为量测值且Zk=Pc,若受到干扰可写作:

因此,未受到干扰的更新方程可写作:

若受到干扰则方程变为:


4 仿真实验与结果分析
为了验证上节提出的局部状态χ2检验法,实验中模拟多站转发时延干扰,假设干扰机所在坐标分别为A1:(30.8°N,117.4°E,6 500 m),A2:(30.8° N,117.8°E,6 500 m),A3:(30.4°N,117.6°E,6 500 m),A4:(31.2°N,117.6°E,6 500 m)。载体真实轨迹如图2粗实线所示,载体在200 s~300 s进入干扰区域,按预想计划,GPS接收机受到诱偏如图2细虚线所示。
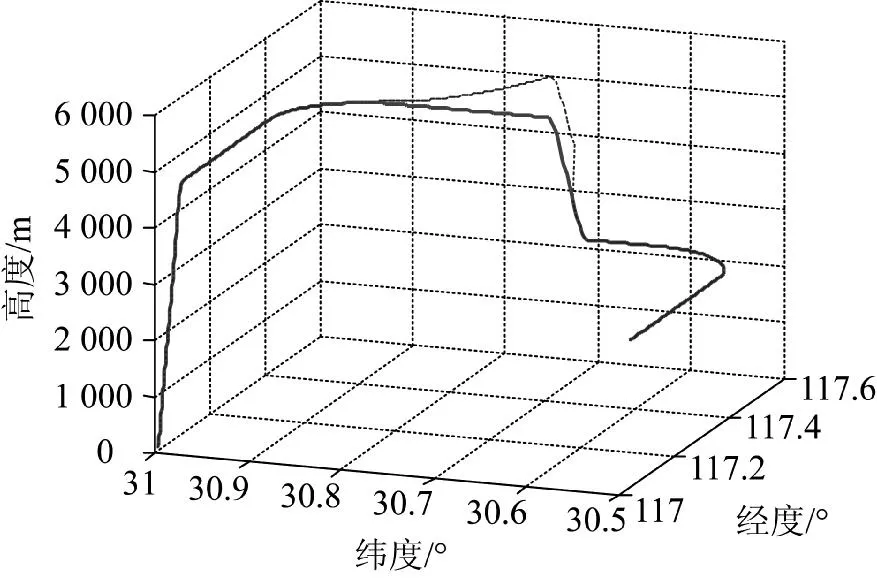
图2 真实轨迹与预想诱偏效果
在不加入干扰的情况下,单独进行一次实验,状态检验如图3。

图3 未加入干扰时延的χ2状态检测
在200 s~300 s,加入干扰时延后的状态检验如图4。
由图可知,200 s~300 s的故障检测函数值明显比其他时间段要高很多。t=200 s加入时延干扰后,t=203 s即判断出伪距故障的发生。局部状态χ2检验能够以较高的灵敏度和较高的准确性判断转发式干扰的发生。这就避免了GPS接收机将干扰数据引入INS反馈校正的发生。
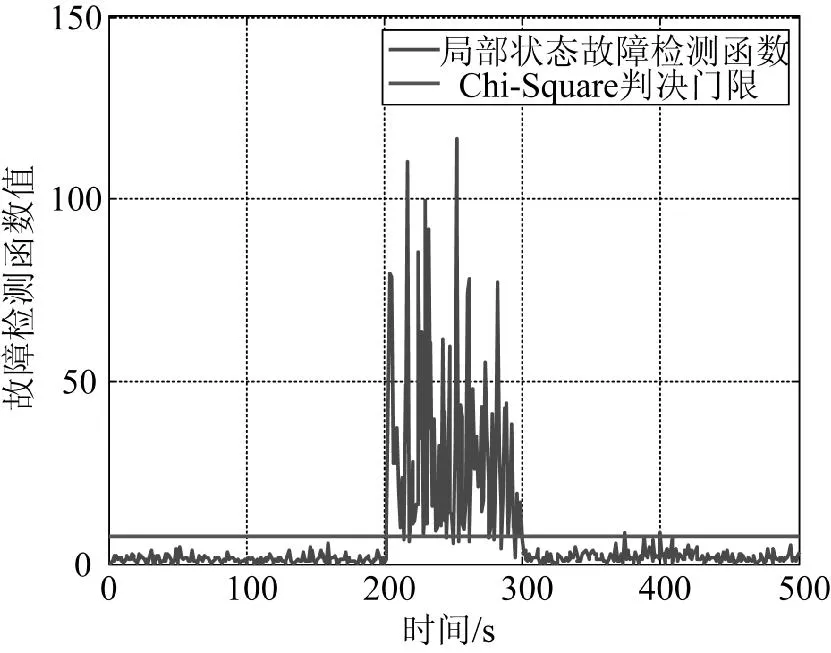
图4 加入干扰时延的χ2状态检测
5 结束语
为了检测GPS转发式干扰,根据故障诊断的启示,采用局部状态χ2检验的方法,根据对钟差等效距离及频差等效距离变化率的故障检测的结果,对INS的输出进行选择性校正。仿真实验模拟了典型的多站GPS转发式干扰环境,结果表明了基于钟差χ2状态检验方法能够有效判断干扰,但正如前文所述,GPS接收机受到转发式干扰是判断系统发生故障的充分而非必要条件。
[1]刘建业,曾庆化,赵 伟.导航系统理论与应用[M].西安:西北工业大学出版社,2010.
[2]张 颂,杨景曙,苗 苗.诱偏暨导航一体化平台位置误差补偿算法[J].现代雷达,2012,34(2):18-19.
[3]王惠南.GPS导航原理与应用[M].北京:科学出版社,2003.
[4]焦 逊,陈永光,孙云辉.对GPS接收机实施欺骗式干扰的定位误差研究[J].电子对抗技术,2003,15(6):21-24.
[5]王妍洁,董绪荣.转发式GPS干扰仿真研究[J].全球定位系统,2004,29(6):16-18.
[6]刘延斌,苏五星,闫抒升.转发式欺骗信号干扰GPS接收机的效能分析[J].空军雷达学院学报,2004,18(4):4-6.
[7]王 伟,陶业荣,王国玉,等.GPS欺骗干扰原理研究与建模仿真[J].火力与指挥控制,2009,34(6):115-118.
[8]Tallarida R J.Murray R B.Chi-Square Test[J].Manual of Pharmacologic Calculations,1986:140-142.
[9]王仲涛,王 龙,王 楠.一种组合导航低成本地面验证技术[J].四川兵工学报,2012,33(3):59-61.
[10]钱华明.故障诊断与容错技术及其在组合导航系统中的应用研究[D].哈尔滨:哈尔滨工程大学,2004.
A Test Method for GPS/INS Integrated Navigation Repeater Jamming Based on Partial States Test
ZHU Li-xin1,2,MENG Yan1,2,Wang Jiang1,MA Chun-lai1,2
(1.Electronic Engineering Institute of PLA,Hefei 230037,China;
2.Province Key Laboratory of Electronic Restriction,Hefei 230037,China)
For the problem of GPS/INS Integrated Navigation Repeater Jamming,a method based on partial states chi-square test is presented.This method is based on the relationship between analysis of the characteristics of fault changes and the characteristics of fault diagnosis function.According to Demonstrate the feasibility of the method via changes in the observed value,changes in the observed model,and state value changes in the chi-square test,it is concluded that Repeater Jamming is a unnecessary and sufficient condition for GPS/INS Integrated Navigation's system fault.At last,by adding cajolery to simulation trajectory to simulate the Repeater Jamming,the simulation results show that this method can judge the occurrence of Repeater Jamming in high sensitivity and high accuracy.
GPS/INS Integrated Navigation,Repeater Jamming,partial states,chi-square test
TN967.2
A
1002-0640(2014)10-0146-04
2013-08-09
2013-10-17
朱立新(1963- ),女,安徽省无为人,副教授。研究方向:信息处理、目标跟踪、卫星导航等。
猜你喜欢
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
航天电子对抗(2019年4期)2019-12-04 09:01:49
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
北京航空航天大学学报(2017年9期)2017-12-18 07:12:24
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
