
一种弯管加热成型回转系统的设计
2014-06-09 12:33姚树楷贾瑞清
机电产品开发与创新 2014年3期
姚树楷,贾瑞清
(中国矿业大学(北京)机电与信息工程学院,北京 100083)
一种弯管加热成型回转系统的设计
姚树楷,贾瑞清
(中国矿业大学(北京)机电与信息工程学院,北京 100083)
随着弯管在各个行业的需求量急剧增加,对弯管成型的工艺以及设备的研究已渐渐引发热潮。论文在北京国电富通公司对弯管成型工艺流程的实验基础上,对于弯管成型的自动化工艺进行了研究,设计了一种流水线回转系统,为今后弯管成型的自动化设备的设计提供参考。
弯管成型;回转系统;自动化设备;加热成型
0 引言
2008年1 月,国网公司《关于转变电网发展方式、加快电网建设的意见》中指出,到2020年,建成直流输电工程38项,输电容量1.91亿千瓦,线路长度5.23万公里,其中±800kV直流特高压输电容量7600万千瓦。这些线路将主要用于西电东送工程和国内几大区域电网的互联,实际配水管路及水冷主机需求总量应在17亿元以上[1]。目前国内企业主要采购国外的配水管路,供应能力满足不了目前市场需求,因此换流阀配水管路弯管技术研究十分必要。
目前,PVDF管道的弯管成型工艺十分落后,弯曲成型后的PVDF管存在截面形状畸变、起皱、截面厚度误差大等缺陷,使用时可能出现渗漏、异常变形和破裂等安全隐患,并且在生产过程中废品率高,浪费资源。
本文在北京国电富通公司的实验基础上,提出了一种新型的针对PVDF材料直管自动化弯管成型的自动化系统方案。
1 弯管成型技术与流程要求
北京国电富通有限责任公司进行了关于弯管成型的研究,目前采用的是加热有模压弯的方法。
加工原材料是外径Φ20,内径Φ16的PVDF直管,在加热到PVDF的熔点173℃之后,再由上下模具合模之后成做需要的U字型,特制的上下模具如图1所示。
由于需要加热,为防止PVDF直管在合模压制的过程中弯曲部分出现增厚或起皱,先在直管中间拉入一段尺寸合适的橡胶棒,起到对直管内部的支撑作用。之后将模具与待加工直管放入烘箱中加热到173℃,加热半小时之后由工作人员取出,安装至图3所示气动装置上进行合模操作,完成合模之后再放入烘箱中定型保温半小时,之后拿出冷却。等模具冷却到40℃之后,再放在气动装置上将上下模具拔开,并将已成型后的弯管中的橡胶棒抽出,即完成弯管成型的全部流程。
这种弯管工艺降低了废品率,但在生产安全和生产效率上都差强人意。因此本文在保留弯管技术工艺流程的前提下,设计出一个自动化弯管成型的回转流水线平台。
图1 弯管压制模具Fig.1 Bending press mold
2 模具改进与驱动方式设计
为了实现自动化以及保证加工工艺流程,须对原本的上下模具进行改进设计,并对其驱动方式进行重新设计。
2.1 单组模具结构设计
模具的改进结构如图2所示,模具由原本的上、下模具倒置工作,上下模具中均开有半圆型槽,当上下模具合并时,放于模具之间的直管即可压模成为对应形状的弯管。
将下模具中间挖空,装入左右两根导杆,用作上模具上下行进时导向,中间装入丝杠轴,上模具在对应位置装入配套的丝杠滑块,于是当丝杠正反转动时,上模具即可沿着导杆上下行进,完成合模与拔模的流程。
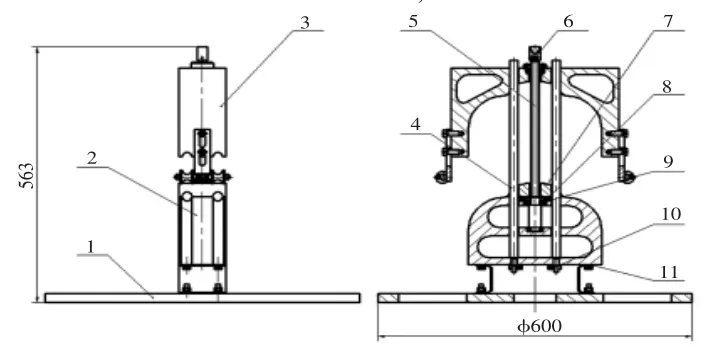
图2 模具示意图Fig.2 Sketch map for mold
由之前实验中得知,在只使用上下模具进行合模压制的时候,直管在弯曲变形处所受到的应力的力臂非常短因此需要非常大的压力作用才能够达到直管弯曲所需弯矩。因此在合模过程中非常容易由于过大的受力而产生一些皱褶,从而导致产品不合格。
为此上模具两端加装了预压轮,可以预先对直管的两端进行压合。在使用预压轮之后,直管在接触到上模具之前就已经受到预压轮的作用,作用力臂远长于不加轮时,在达到直管弯曲所需弯矩恒定的情况下,需要的力也相应变小很多,因此在预压时并不会损伤直管。而等到直管有一定弯曲度的时候,上模具接触开始压合,所需应力不会对管身造成损伤。
在丝杠轴顶端装有离合套,用于驱动。离合套结构上为一个异形方孔套,当驱动的异形轴落入离合套中,电机即可驱动丝杠进行开合模;当驱动的异形轴上升离开离合套之后,模具可以随流水线回转系统离开驱动装置。
2.2 模具开合模的驱动装置设计
模具的开模与合模用滚珠丝杠来实现如图3所示。用模具上方的电机带动,将旋转运动转化为上下的直线运动,从而使上模具上下移动,对下方的直管进行压合,最终与下模具合并,完成合模过程。相似地,开模过程是电机带动反转,即可实现。同时,下方模具是跟随托辊在环形道上移动,因此驱动装置需要上下移动,反复与模具卡合,以完成流水线作业。使用电缸来控制驱动轴的上下运动,驱动轴与电机轴用一个间隙配合的联轴器相连,可以保证驱动轴顺利向上运动,缩进到联轴器中。
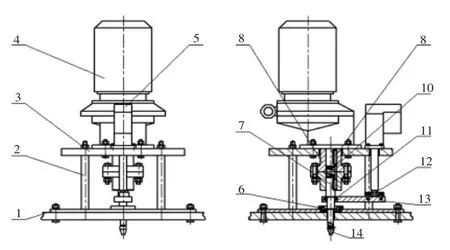
图3 开合模驱动装置Fig.3 Drive device for mold opening and closing
3 回转系统设计
3.1 回转系统结构设计
弯管回转系统初步设计为环式结构,由两个完全相同的加工区组成,每个加工区又分为准备区、合模区区、保温区、抽芯区与拔模区五部分,如图4所示。
模具下方的支撑板随驱动托辊绕圆环轨道行进,模具也随着之进入烘箱进行加热、合模、保温工序,出烘箱后进行冷却、抽芯、拔模工序,之后准备进入下一个烘箱。模具每沿环形导轨行进一周,可完成两次加工循环。
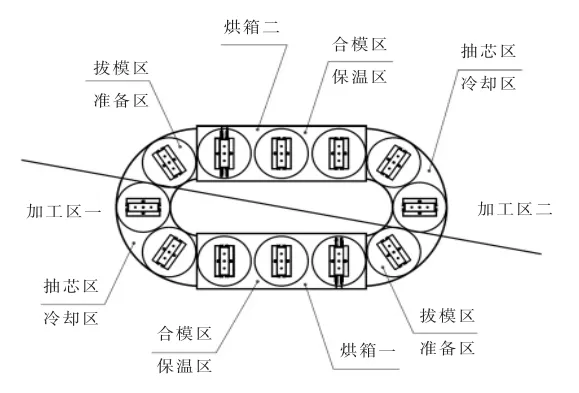
图4 系统分区图Fig.4 Partition map of the system
支撑板的行进由下方的托辊带动,托辊在导轨中分为驱动区与非驱动区两部分,如图5所示,两个电机分别带动两个驱动区的一个托辊,驱动区的其余托辊由齿轮与链条相连,组成驱动托辊组,两个驱动区分别由两个电机带动,分开行进。非驱动组的托辊不与电机相连,托辊分别自由转动,其上的支撑板由驱动区带来的支撑板从后方推动前进。
同时由于支撑板设计为圆形,则模具在行进中的时候可以自由转动,因此驱动系统的离合装置均装在模具系统的正中心,以保证模具无论在什么方向均可使合模与拔模顺利进行。
由于烘箱内部需要放置三套模具,每套模具的最大直径为600mm,因此烘箱内部空间的尺寸定为(2000×620×620)mm。
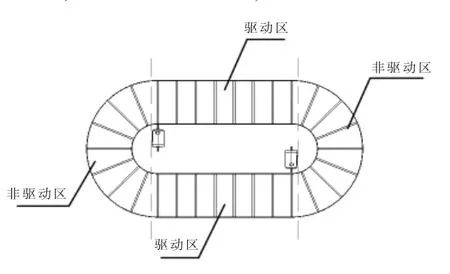
图5 托辊导轨布置Fig.5 Layout of the roller rail
3.2 回转系统控制流程
系统使用行程开关和延时继电器进行控制,当支撑板带着模具到达预定位置时即触发行程开关,通过预先编写好的延时程序,即可实现回转控制。
运行步骤如下:①将模具抽芯轮上的橡胶管塞入PVDF直管原料中,放入模具内,用直管定位机构固定;②时间继电器控制烘箱门打开,模具由驱动托辊带动进入烘箱;③模具触碰合模区行程开关一,电磁继电器一启动,模具定位机构一将模具定位,加热区托辊驱动电机停机,时间继电器一开始计时;④时间继电器一控制驱动轴进行合模,合模结束后电磁继电器一断开,定位机构一与模具分离,加热区托辊驱动电机启动;⑤模具由托辊与前后模具带动,在保温区内行进,最终烘箱门由时间继电器控制打开,模具离开烘箱;⑥模具在后方模具的推动下在冷却区行进进行降温;⑦模具碰触拔模区行程开关二,电磁继电器二启动,模具定位机构二将模具定位,拔模区托辊驱动电机停机,时间继电器二开始计时;⑧时间继电器二控制驱动轴进行拔模,拔模结束后电磁继电器二断开,定位机构二与模具分离;⑨工作人员将成型弯管取出,放入新的直管,进入下一个烘箱,开始下次循环。
4 模具及驱动相关计算
4.1 梯形丝杠与电机的选型计算
合模过程共需移动距离s=200mm。预计合模时间t=5s,因此上模具移动速度:
由上下模具的空间限制,拟选用THK公司DCMB 15T型梯形丝杠进行传动。
丝杠静态负载为上模具重量,由上模具尺寸可算得其质量为22kg,因此静态负荷:
P'=22×9.8N=215N<P
负荷丝杠静态容许负荷的要求。
由上模具移动速度与丝杠导程可求出丝杠转速:
根据转速和许用扭矩T,选出电机型号为通力电机TRF28型。
压强速度(PV)是计算梯形丝杠强度的重要标准,即丝杠运动时的接触面压P与齿面滑动速度v的乘积在一个确定值之下,则丝杠不会有异常磨损。计算公式如下:
式中:P—在施加负荷扭矩的情况下齿面的接触面压(N/mm2);T—动态容许扭矩(Nm);PT—承受的扭矩(Nm)。
式中:V—滑动速度(m/min);D0—有效直径(mm);n—转速(r/min)。 带入数据可算得:P=7.86N/mm2,V=3.77m/min。查表可得,丝杠在运动时不会有异常磨损。当丝杠在承受26Nm的扭矩时,所产成的推力:

式中:Fa—产生的推力(N);η—丝杠的效率,此处取80%;PT—承受的扭矩(Nm);R—丝杠的导程(mm)。带入数值,计算得Fa=2942N。Fa小于丝杠的动态容许推力F,丝杠在运动中不会受到损害。因此,丝杠在电机全部扭矩的带动下,对上模具可以产生2942N的推力。在合模时,加上上模具的重力,可达3158N,完全可以将已临近融化的直管压塑成型。拔模时,在克服上模具重量之后,尚有2726N的力,可以将上下模具拔离。
4.2 电缸选型计算
电缸的作用是控制从动轴的升降,以便及时进行合模与拔模的动作。由模具结构可知,离合套的啮合部分高度为15mm,因此需选用的电缸应可以承受地住轴的重量,且可以较快地行进。拟选用型号为LEY25B的出杆式电缸进行控制。
由于电缸在本系统内的作用是尽快将离合套啮合上,一般会尽量选用高速运行,需要保证电缸在高度运动下仍然可以具有一定的搬运质量,因此选用装配有伺服电机的电缸来执行。该电缸在最大的速度运行下仍可保持最大的垂直搬运质量。电缸带动的从动轴最大直径为25mm,长度为150mm,考虑到钢材的密度为9850kg/ m3,算得轴的质量约为0.6kg。
由于电缸在上提时还需克服弹簧的弹力,因此选用垂直搬运质量为6kg的电缸LEY25AB来完成动作,最大速度为 vt=250mm/s。电缸加速度设为 a=3000mm/s2,则在运动过程中,加速到最大速度所用时间:
达到最高速度时已行进行程为:

由于总行程s=15mm,因此伸出杆还要以250mm/s的速度走完剩下的s2=s-s1=4.58mm。所用时间:

则电缸行进15mm,所用的总时间:
t=t1+t2=0.101s
考虑到电缸安装的空间要求,支撑连接件采用杆侧法兰型,杆前端连接件采用简易性连接件。最终选用电缸型号为LEY25RAB-150BF,配件接头YU-03,安装件YB-03。
5 结论
随着国家经济发展,对于各种特种形状的管材的需求会越来越大,如果都是使用原始的手工合模加工,生产量远远不足以消耗量。因此对弯管成型的自动化设备的研发势必会引发热潮,并有很大前景。本文用流水线思路做成的回转系统提升了弯管成型的自动化程度,并极大地提高了生产效率,且对于操作来说也比传统方法更加安全,为今后弯管系统的自动化设备研究提供了参考。
[1]赵藟.国家电网公司电网发展战略研究[D].西南交通大学,2007.
[2]王海同.管材塑性加工技术[M].机械工业出版社,1998.
[3]吴秀林.基于Stewart平台机构的智能弯管机的优化设计与运动控制[D].西南交通大学,2005.
[4]王洪文,左继承.半自动液压弯管机及其PLC控制系统[J].新技术新工艺,2006,3.
[5]王建英.基于PLC控制的大型中频加热弯管机的研究[D].华北电力大学,2007.
[6]Frackiewice H.Technology of Metal Shaping by Laser[J],Institute of FoundametalTechnologicalResearch,PolishAcademyofScience.1999.
[7]赵春.X100管线弯管的组织—性能研究[D].西安石油大学,2008.
A Rotation System for Elbow Pipe Thermoforming
YAO Shu-Kai,JIA Rui-Qing
(School of Mechanical Electronic&Information Engineering of China University of Mining and Technology(Beijing),Beijing 100083,China)
With the dramatic increase of elbow pipes in demand for various industries,research and equipment of the elbow pipe molding process has gradually lead to boom.In this paper,an automatic equipment for forming elbow pipes was studied,which is based on the experiment made by Beijing Guodian Futong company.And a rotation system has been designed which would provide a reference for the future automated elbow pipe forming equipment.
elbow pipe forming;rotation system;automatic equipment;thermoforming
TH-39
:Adoi:10.3969/j.issn.1002-6673.2014.03.016
1002-6673(2014)03-041-04
2014-03-26
姚树楷 (1989-),男,安徽淮南人,中国矿业大学(北京)机电学院机械电子专业在读硕士研究生。
猜你喜欢
橡塑技术与装备(2021年1期)2021-01-05
中国造纸(2019年7期)2019-08-28
河南科技(2018年9期)2018-09-10
河南科技(2018年3期)2018-09-10
河南科技(2018年12期)2018-09-10
中国设备工程(2017年7期)2017-01-20
中国塑料(2016年6期)2016-06-27
中国塑料(2016年9期)2016-06-13
中国塑料(2016年1期)2016-05-17
中国塑料(2015年11期)2015-10-14
