矿用电动轮自卸车制动时电机过流故障分析
2014-06-08 03:41陈冠华袁立强杨日龙王文胜赵争鸣
电工电能新技术 2014年10期
陈冠华,袁立强,杨日龙,王文胜,赵争鸣
(1.清华大学电机工程及应用电子技术系电力系统及发电设备控制和仿真国家重点实验室,北京100084;2.北京东风机车电器厂,北京100072)
矿用电动轮自卸车制动时电机过流故障分析
陈冠华1,袁立强1,杨日龙2,王文胜2,赵争鸣1
(1.清华大学电机工程及应用电子技术系电力系统及发电设备控制和仿真国家重点实验室,北京100084;2.北京东风机车电器厂,北京100072)
巨型矿用电动轮自卸车在采矿业、大型工程建设行业发挥重要的作用。实际运行中发现其电力传动系统在自卸车高速运行状态下制动容易发生过流故障,由于系统硬件限制无法使用传统调试方法实时观察程序运行情况。本文提出一种基于逆向技术的过流故障分析方法,即利用逆变器输出实测电压推算得到控制程序中空间电压参考矢量幅值和相位的实时值,以用于故障分析。在本文的分析案例中,采用该方法发现了程序中空间电压参考矢量的瞬时频率突变是导致过流故障的直接原因,进一步分析发现转速采样信号受到了高频干扰致使空间电压参考矢量的瞬时频率突变,文中给出具体措施,有效地解决了过流故障问题。
大容量电力传动系统;电动轮自卸车;过流故障;逆向技术
1 引言
巨型矿用电动轮自卸车载重量在100吨以上,广泛应用于大型露天矿山的矿石运输和大型工程建设中,占世界煤矿运输量的40%及铁矿运输量的90%[1],在国民经济建设中发挥着重要作用。
与传统的机械传动自卸车不同,电动轮自卸车通过电力传动系统实现整车的高性能牵引和电气制动控制,简化了传统机械传动自卸车中复杂而笨重的机械结构,避免在大转矩传递过程及巨型车辆制动过程中造成的机械磨损问题,提高了整车的效率和可靠性。当前大多数电动轮自卸车采用的是发电机-变换器-异步电机的电力传动系统,取代了传统的机械传动系统[2,3]。通过控制发电机及变换器,可以控制整车实现牵引、变速、制动、倒车等多种功能。
电动轮自卸车电力传动系统功率容量大,单个异步电机额定功率一般在几百千瓦[4],变换器开关频率一般低于1kHz;在不同的工况下,电机定子电流频率在十几赫兹到一百多赫兹之间变化,同时还需要应对矿区复杂路况带来的负载转矩的频繁剧烈波动。巨型矿用电动轮自卸车所采用的离网大容量低开关频率电力传动系统面临诸多挑战,是当今最复杂的电力传动系统之一。
在矿用电动轮自卸车的电力传动系统中最容易发生的故障保护是过流保护。当车辆发生过流保护后,自卸车丢失动力来源,失去电气制动能力。为保证车辆安全,司机必须进行紧急液压制动。在车辆高速运行时使用液压制动,严重损害液压制动系统,降低系统寿命,严重时甚至引发摩擦片燃烧,危害车辆安全。为了保障车辆的安全稳定运行,需要分析并找出导致电力传动系统发生过流现象的根本原因。
出现过流保护后,常规调试方法是实时采集系统状态数据,利用通讯协议将控制程序内部变量发送到上位机,从而实时观察程序运行情况来进行调试。然而由于本文所研究自卸车电控系统硬件配置的限制,无法进行实时的程序内部变量观察,不能明确知道过流前后程序的运行情况,此时常规调试方法不再适用。为了解决这种过流保护问题,必须寻找新的调试方法。
本文采用逆向技术,对矿用电动轮传动系统的过流现象进行研究,结合具体的现场过流案例分析,给出其具体原因以及相应的解决措施。
2 电动轮自卸车过流问题
巨型矿用电动轮自卸车的电力传动系统结构如图1所示,包括柴油机、同步发电机、二极管整流器、IGBT逆变器、异步电机、斩波器与制动电阻柜等。控制系统底层采用七段式SVPWM。

图1 电力传动系统结构图Fig.1Structure diagram of motor drive system
当电机电流幅值增加并超过变换器过流故障保护的阈值时,电力传动系统发生过流保护。图2是一辆现场运行的电动轮自卸车制动时异步电机电流快速增加并发生过流保护的案例。在这个案例中电力传动系统的异步电机额定功率为590kW,额定电压为1140V,额定电流为350A,额定频率为60Hz,逆变器的开关频率为800Hz。
图2中的过流现象和正常时电流逐步增大现象不同。正常状态下电流增大是受控制系统控制的,在较长一段时间内逐步增大;而这种过流现象在几个开关周期内,电流迅速增加,直至产生过流故障保护。从图2中可知,过流前正常运行的电流幅值约为132A,而在发生过流的短时间内,电流幅值增至804A,产生严重过流。
3 过流故障保护问题分析
在分析导致过流故障的原因时,遵循从底层往顶层排查的原则,首先检查底层SVPWM程序输出是否合理。由于系统硬件限制无法使用传统调试方法实时观察程序运行情况,本文提出一种基于逆向技术的过流故障分析方法,即利用逆变器输出实测电压推算得到控制程序中空间电压参考矢量幅值和相位的实时值,以用于故障分析。

图2 过流故障时的电压电流波形Fig.2Voltage and current waveforms in overcurrent fault cases
3.1 逆向分析方法
在SVPWM中,根据输入的空间电压参考矢量的幅值和相位得到逆变器开关管的驱动脉冲。定义空间电压参考矢量为:


从f(t)的表达式中可以得知瞬时频率与控制程序中的同步角频率成正比,是输出电压的一个重要表征量。如果通过实测电压波形得到瞬时频率的波形,就可以间接知道程序中同步角频率的实时值。然而,由于实际逆变器输出电压为PWM波形,直接对φ(t)求导会产生尖峰值,公式(2)很难用来分析实际波形数据。
为了解决这个问题,本文采用一个开关周期内对输出电压取平均值的方法,提出了改进型瞬时频率的计算方法。定义瞬时频率:

式中,φ(t)是每一个开关周期中空间电压参考矢量的相位;Δφ(t)表示相邻两个开关周期的空间电压参考矢量的相位差;Tcs是程序的控制周期。改进型瞬时频率计算步骤如下:
(1)利用录波仪实时记录逆变器各相输出电压,并根据录波仪的采样率和逆变器开关频率的关系对实测数据进行区段划分,使同一开关周期内的数据位于同一区段。
(2)求得每一个开关周期内,逆变器各相输出电压的平均值珚Ua,珚Ub,珚Uc,并利用电压平均值按式(1)计算得到空间电压矢量的幅值和相位。
(3)根据式(3)计算空间电压矢量的瞬时频率。
按照上述四个步骤采用逆向分析的方法,利用逆变器输出电压的实测值推算得到控制程序中空间电压参考矢量幅值和相位的实时值,并计算得到瞬时频率。
3.2 故障波形记录与分析
在自卸车现场运行时,使用录波仪记录发生过流保护前后逆变器输出的电压电流波形,采样率为1MS/s,记录的波形图如图2所示。
根据逆向分析的方法,可以得到空间电压参考矢量的幅值相位及瞬时频率波形如图3所示。

图3 空间电压矢量幅值相位与瞬时频率波形Fig.3Waveforms of amplitude,angle and transient frequency of voltage space vector
发生过流现象前后,空间电压参考矢量的幅值平稳,从相位波形中也不容易发现异常,然而其瞬时频率波形在过流前发生突变,先跌落后过冲,出现了异常情况。
电机正常运行时,控制逆变器输出电压形成近似圆形的电机磁链。然而当瞬时频率发生突变后,电机的空间电压矢量在一个开关周期内所形成的磁链偏离正常的圆形轨迹。由于开关频率为800Hz,而过流时电机定子电流频率为130Hz,低载波比时一个开关周期的空间电压矢量发生错误,电机定子磁链严重偏离圆形轨迹,进而导致电机过流。极端情况下,瞬时频率跌落至零,此时即出现了脉冲重发的异常情况,会造成过流故障。
3.3 仿真验证
为了验证瞬时频率突变与电机过流的关系,根据图1中的系统控制框图搭建基于Matlab/Simulink的仿真系统,仿真系统的参数设置与实际系统相同。在电机同步角频率达到并稳定在440rad/s后,在t=3s时空间电压参考矢量的瞬时频率发生幅值为50Hz的尖峰。仿真得到的空间电压参考矢量的瞬时频率、转子磁链αβ分量、C相电流和定子电压的αβ分量的波形如图4所示。
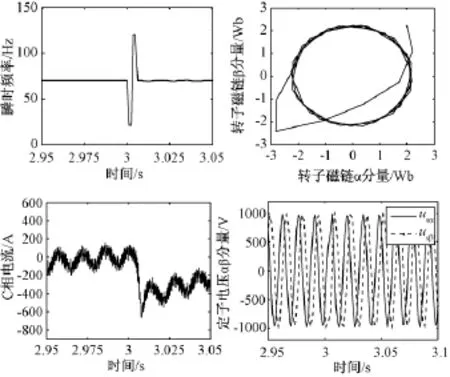
图4 瞬时频率突变时的仿真波形Fig.4Waveforms of voltage space vector in simulation
根据仿真结果发现过流现象与瞬时频率突变有关,瞬时频率发生突变后SVPWM输出电压异常,导致电机在短时间内产生过流。
3.4 产生瞬时频率突变的原因分析
在系统控制程序中,空间电压参考矢量的幅值由电流调节器输出决定,其相位由同步角频率积分得到。当瞬时频率发生突变时意味着同步角频率发生突变,可能原因是电机转速反馈信号或者滑差频率值发生突变,而滑差频率由控制系统的指令值给出,发生突变的可能性不大,所以可能是电机转速反馈信号发生突变,导致同步角频率发生突变并最终产生过流。
据此对控制程序进行重新检查,发现程序中转速采样信号缺少抗电磁干扰的有效措施。在车辆高速运行时制动,由于机械振动或者电磁干扰,导致电机码盘输出的转速采样信号中包含高频尖峰信号。受到干扰而出现突变的转速反馈信号参与到滑差控制中,使得程序中同步角频率发生突变,进而导致了空间电压参考矢量的瞬时频率发生突变,出现过流故障。
4 过流故障保护问题的解决措施
为了消除转速采样信号中的高频干扰对控制程序的影响,需要增加控制程序的抗干扰措施,具体措施为使转速采样信号经过一个低通滤波器后再参与程序的后续运算。由于转速采样信号为缓慢变化的机械量信号,在控制系统中设置低通滤波器的截止频率为20Hz,改进后的系统控制框图如图5所示。

图5 改进后的系统控制框图Fig.5Structure of improved control system
这样转速反馈信号中的高频干扰被低通滤波器消除,在高速运行时制动的情况中,空间电压矢量的瞬时频率不再发生突变,最终过流故障问题得到解决。车辆下坡时制动的电流波形如图6所示。
5 结论

图6 改进后车辆下坡制动时的电流实验波形Fig.6Experiment current waveform when truck brakes in high speed area after improvement
本文提出一种基于逆向技术的过流故障分析方法,即利用逆变器输出实测电压推算得到控制程序中空间电压参考矢量幅值和相位的实时值,以用于故障问题分析。在分析电动轮自卸车现场发生的过流问题时,采用该方法发现了程序中空间电压参考矢量的瞬时频率突变是导致过流故障的直接原因,进一步分析发现这样的瞬时频率突变是由于转速采样信号受到了高频干扰的影响所致,控制程序中缺少有效的抗干扰措施。在控制程序中增加低通滤波器消除转速采样信号中的高频干扰,并最终有效地解决了过流故障问题。
[1]朱广辉(Zhu Guanghui).关于“十二五”固体矿产资源高效开发利用重大技术装备大型矿用电动轮自卸车的建议(Suggestion on developing huge electric mining haul trucks to make high use of mineral sources during 12th five-year guideline)[J].电器工业(China Electrical Equipment Industry),2009,(4):70-73.
[2]李勇,杨耀东,马飞(Li Yong,Yang Yaodong,Ma Fei).矿用电动轮自卸车的概况及未来发展趋势(Review and future trend of electric mining haul trucks)[J].矿山机械(Mining and Processing Equipment),2010,38(14):9-16.
[3]Mazumdar J.All electric operation of ultraclass mining haul trucks[A].Industry Applications Society Annual Meeting,2013 IEEE[C].2013.1-5.
[4]Mirzaei S,Fernandez A.Retard system solution on electric mining trucks[A].2012 IEEE Symposium on Sensorless Control for Electrical Drives[C].2012.1-5.
[5]Brown G M,Elbacher B J,Koellner W G.Increased productivity with AC drives for mining excavators and haul trucks[A].Industry Applications Conference,Conference Record of the 2000 IEEE[C].2000.28-37.
[6]白华(Bai Hua).电力电子变换器中电磁脉冲功率瞬态过程研究(Research on the transient processes of electromagnetic pulsed power in power electronic converter)[D].北京:清华大学(Beijing:Tsinghua University),2007.
(,cont.on p.69)(,cont.from p.15)
Analysis of overcurrent fault occurred when electric mining haul truck brakes
CHEN Guan-hua1,YUAN Li-qiang1,YANG Ri-long2,WANG Wen-sheng2,ZHAO Zheng-ming1
(1.State Key Lab of Control and Simulation of Power Systems and Generation Equipments,Department of Electrical Engineering,Tsinghua University,Beijing 100084,China; 2.Beijing Dongfeng Locomotive Electrical Factory,Beijing 100072,China)
Huge electric mining haul trucks are widely used in mining industries,which greatly increases the efficiency of ore transportation in mines.Overcurrent faults easily occur in the motor drive system when trucks brake in high speed area.As the limit of hardware of the system,traditional debug method is no longer accessible.In this paper,a new overcurrent fault analysis method based on reverse technology is proposed,which is to get the realtime value of voltage space vector in the control program from the measured real-time inverter output voltage.In the overcurrent fault case in this paper,this method is applied and it proves that the sudden drop of transient frequency of voltage space vector causes overcurrent,which are because of the electromagnetic interference of speed feedback signal after further analysis.Detailed solution is given to solve this problem.Experiment proves the effectiveness of the solution.
high power motor drive;electric mining haul truck;overcurrent fault;reverse technology
TM301.2
A
1003-3076(2014)10-0012-04
2014-04-04
陈冠华(1990-),男,湖北籍,硕士研究生,研究方向为电力电子与电力传动;赵争鸣(1959-),男,湖南籍,教授,博士生导师,主要从事电力电子与电机集成系统的应用研究。
猜你喜欢
中国造纸(2022年8期)2022-11-24
汽车实用技术(2022年5期)2022-04-02
一重技术(2021年5期)2022-01-18
水利规划与设计(2020年1期)2020-05-25
测控技术(2018年5期)2018-12-09
智能城市(2018年17期)2018-10-12
电子制作(2018年10期)2018-08-04
电子制作(2017年19期)2017-02-02
光学精密工程(2016年3期)2016-11-07
专用汽车(2015年2期)2015-03-01