热轧重轨表面缺陷在线检测识别的关键技术研究
2014-06-07 10:02谢志江谢长贵
计量学报 2014年2期
谢志江, 谢长贵
(重庆大学机械传动国家重点实验室,重庆 400044)
热轧重轨表面缺陷在线检测识别的关键技术研究
谢志江, 谢长贵
(重庆大学机械传动国家重点实验室,重庆 400044)
目前热轧重轨表面缺陷检测速度慢、精度低。为此,提出了一种基于机器视觉的热轧重轨表面缺陷在线检测系统。分析了过暗过曝区域交叠融合法与图像像素线互相关校验法两种方法提取特征缺陷等关键技术,并对模糊脉冲神经网络的表面缺陷分类效果进行了研究。实际应用证明,采用上述机器视觉的检测关键技术对热轧重轨表面进行缺陷检测识别,较大提高了检测速度和精度,且检测正确率在90%以上。
计量学;机器视觉;缺陷识别;热轧重轨;检测精度
1 引 言
重轨表面情况是评价重轨质量的一个重要技术指标,其质量情况直接关系到铁路运输的安全[1,2]。目前热轧重轨表面缺陷检测主观性较强,热轧重轨仅在轧机出口后的冷床上进行检测,且仅靠检测技术人员的肉眼完成;检测环境差,冷床上的重轨存在高温、热辐射、重粉尘等特性;只进行抽检,且抽检率低。国内对于热轧重轨表面缺陷的在线检测,还没有较成熟的检测方法,尤其在缺陷特征提取,缺陷分类等关键技术方面大多使用效率较低的算法,如利用传统的边缘检测算法提取缺陷特征及SVM(支持向量机)方法进行缺陷分类[3~5]。本文针对当前热轧重轨表面缺陷检测速度慢,检测精度低的问题,应用机器视觉理论和技术,实时采集重轨表面图像,并进行图像处理和缺陷识别,达到在线检测重轨表面缺陷的目的。
2 重轨表面几何特征及缺陷高发区域
重轨表面形状、截面轮廓由多段平面及曲面圆弧连接而成,主要有轨头、轨腰、轨底3部分及各部分间的连接弧面。其形状及主要尺寸见图1。
根据重轨生产表面缺陷统计数据,重轨表面缺陷主要集中在重轨表面的转折连接弧面上,尤其以轨腰的上下腰面处最为突出,其次为表面精度和质量要求较高的重轨底面和踏面,这两类位置的缺陷占总缺陷统计数据的85%以上[6]。

图1 重轨几何特征
3 热轧重轨辐射特性与滤镜
热轧重轨表面实测温度约为800℃,根据对热轧重轨万能轧制过程的有限元分析及结果,重轨经过最后一次精轧后,截面温度分布有限元分析结果如图2所示。根据有限元分析结果,重轨精轧后温度由外到内不断上升,中心最高温度约为900℃,表面温度约为800℃。该有限元分析结果中重轨表面温度与现场实测温度一致。
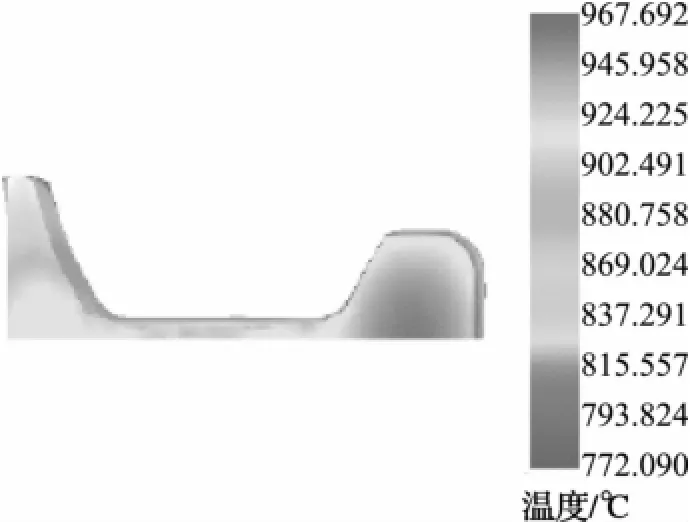
图2 精轧后热轧重轨表面温度有限元分析结果
热轧重轨各方向上辐射亮度接近相同,可近似认为是一个朗伯辐射体,根据高温物体辐射亮度计算公式:

式中,B=1.2867×10-11(W·m-2·μm-1·K-5);Bλ为高温物体在温度T时辐射光谱在波长λ处的辐射强度;ξ为热轧重轨与同温度的黑体辐射辐射率的比值。若直接使用线阵CCD摄像机对重轨进行拍摄,由于CCD摄像机采集到的最终图片将出现强烈的来自重轨内部的红外信息,这些信息会掩盖、干扰重轨表面图像。为获取清晰重轨表面图像,本系统最终选取截止频率为800 nm的红外截止滤镜对镜头入射光进行过滤。
4 缺陷特征提取
重轨表面缺陷种类繁多、形态各异,在图像分析时对重轨每张图像进行每一种缺陷的循环查找和对比,在耗时和计算上都是系统完全无法接受的[7,8]。针对重轨图像缺陷提取的问题,本文提出过暗过曝区域交叠融合法和图像列像素线相关度互校验法2种方法,2种方法互相综合对重轨图像缺陷进行检测和提取。
过暗过曝区域交叠融合法算法的具体过程为:计算去光照不均后的重轨图像直方图,分别以直方图前后占总像素数的a,b的像素点位置的像素值为分割点对图像进行二值化处理,得到图像过曝区域A及图像过暗区域B;对A、B同时进行大尺度膨胀运算,得到Ai、Bi;对Ai、Bi进行叠加区域检验,保留Ai、Bi存在叠加的区域所对应原A、B图像的联通区域,其余联通区域删除,得到去噪后的Ar、Br;对Ar和Br进行合并得到最终缺陷检验结果。计算过程及各部结果如图3及图4所示。
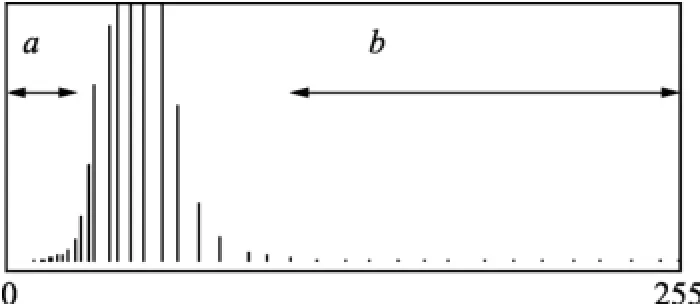
图3 去光照处理重轨待检测图像直方图
图像列像素线相关度互校验法的基本原理为:对图像像素矩阵中的列像素线向量进行相关度计算,若在相关度μ中存在连续的∂个列像素线向量对之间的相关系数值小于设定阈值ε,则该∂个列像素线区域即为缺陷疑似区域的纵向范围。
过暗过曝区域交叠融合法与图像列像素线相关度互校验法检测缺陷的算法如下:
(1)设定较低阈值a、b,用直方图对原始图像分别进行过曝区域和过暗区域的分割,得到图像过曝区域A及图像过暗区域B;

图4 重轨图像缺陷检测
(2)对A、B同时进行大尺度膨胀运算,得到Ai、Bi,然后再对Ai、Bi区域进行叠加区域检验;得到含有缺陷区域重轨图像C;
(3)对重轨图像C像素矩阵Am×n(m行,n列),取列像素线线间相关度计算间隔λ,分别得n-λ对列像素线向量对[Pi,Pi+λ],其中i=1,2,…,n-λ。
(4)分别计算每对列像素线向量对间的相关向度μi

式中,i=1,2,…,n-λ。
(5)对相关度计算结果向量μi进行检验,设检验连续像素数θ和检测阈值ε(0〈ε〈1)。若在μ中存在连续的∂个列像素线向量对之间的相关系数值小于ε,且∂>θ,则该∂个列像素线区域即为缺陷疑似区域的纵向范围。
(6)提取图C的Am×n中满足步骤(3)检测结果的纵向区域Fm×∂(m行,∂列),利用矩形结构元素SE对Fm×∂进行膨胀处理,得到F′m×∂。
(7)计算区域F′m×∂每一行像素的方差值:

对方差Si进行校验,截取满足经验阈值的大范围差异区域,该区域即为缺陷区域。
用该算法进行缺陷提取与只用过暗过曝区域交叠融合法算法相比,能较大提高重轨表面缺陷提取的准确率。选取20幅缺陷图片,用上述两种方法对缺陷图片进行提取,仅用过暗过曝区域交叠融合法算法提取出准确的缺陷图片为11幅,而将该算法与图像列像素线相关度互校验法能准确提取的缺陷图片为19幅。
以待处理图4(a)为实验对象,算法在以下软硬件环境进行,软件环境为Matlab 6.5版本,操作系统为中文WindowsXP3。硬件环境:CPU为IntelI coreI2,主频为2GHz,内存为1G。图5为最终处理结果,其中连续像素θ为52,阈值ε为0.2。
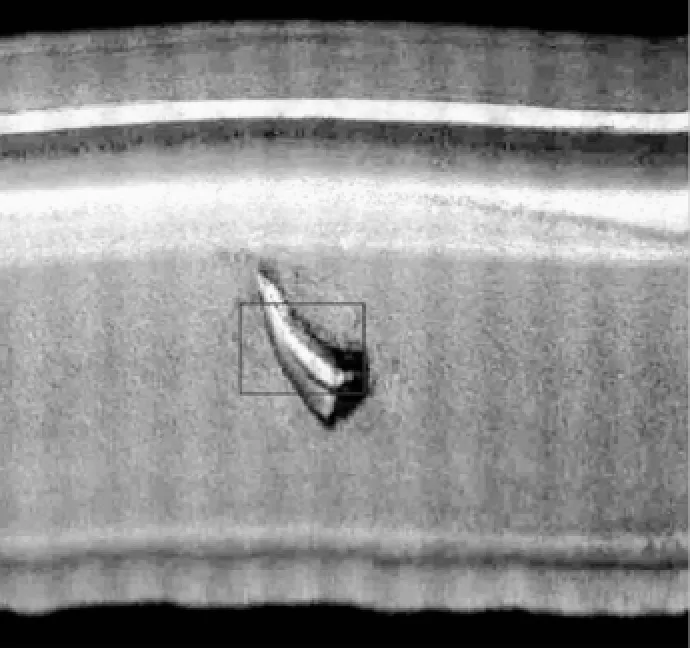
图5 缺陷提取的最终结果
5 缺陷分类
本文选择基于模糊脉冲神经网络的方法对重轨表面缺陷进行分类。与传统SVM方法相比,模糊脉冲神经网络利用很强的聚类能力,学习训练耗时更少,运算速度更快的优点[9]。图6所示为模糊脉冲神经网络的拓扑结构图。

图6 模糊脉冲神经网络拓扑结构图
模糊脉冲神经网络的算法和分类特征如下:
(1)初始化权值矩阵w=[wij]m×ζ,i=1,2,…,m,j=1,2,…,ζ,ζ为模糊权系数,m为输入矢量的维数。设定迭代停止阈值ε。
(2)在m个学习模式中任选一个模式x(k)供给网络输入层,并计算矩阵范数

计算出一个具有最小距离的脉冲神经元Nj。
(3)定义一个周围的邻域Ng(t),使Ng(t)内的单元输出为1,Ng(t)外的单元输出为0。
(4)用Heeb规则修正脉冲神经元Nj及其邻域内的权值。权值调整公式:
式中,0〈ηw(k)〈1,ηw(k)为一学习因子,并随时间下降到0。
(5)将全部样本学习一遍作为一次循环,计算循环前后wjli的变化,当该变化小于阈值ε时,学习过程结束,否则转向步骤(2)。
若把需识别的缺陷样本与网络输入层连接,按照上述学习算法进行迭代计算,模糊聚类层的获胜神经元就会兴奋起来,在输入模式到每个脉冲神经元之间接收信息,并依据隶属度公式识别输入信号的所属类别,实现对重轨表面缺陷的分类。
选择120个样本对模糊脉冲神经网络及SVM分别进行训练学习。在Matlab 6.5环境下对2种算法进行仿真训练,种算法的训练耗时、诊断正确率及迭代次数的比较见表1。

表1 2种算法的实验结果
由表1可知,模糊脉冲神经网络比SVM学习耗时更少,运算速度更快,诊断正确率更高。将50个实际缺陷样本送入学习训练好的模糊脉冲神经网络进行检测分类。其缺陷分类结果见表2所示。

表2 重轨表面缺陷识别结果
6 结 论
本文针对目前热轧重轨表面缺陷检测速度慢、精度低的问题,设计了以高速线阵CCD摄像机采集重轨表面图像,图像处理工作站在线处理图像的机器视觉检测系统,并对热轧重轨表面缺陷机器视觉检测的关键技术进行了详细讨论。经3个月实际应用证明,在线检测系统能在缺陷出现后8秒内准确监测到缺陷位置,使重轨报废数目控制在3根左右,并对大于5 mm的缺陷图像能清晰采集显示。系统的运行在某钢铁厂的实际检测应用中取得了良好的效果,较大提高了热轧重轨表面缺陷在线检测速度及精度。
[1] 王凌云,黄红辉,王雪.重轨表面缺陷机器视觉检测的关键技术[J].重庆大学学报(自然科学版),2007,30(9):27-31.
[2] 张洪涛,段发阶,丁克勤,等.带钢表面缺陷视觉检测系统关键技术研究[J].计量学报,2007,28(3):216-219.
[3] 胡亮,段发阶,丁克勤,等.基于线阵CCD钢板表面缺陷在线检测系统的研究[J].计量学报,2005,26(3):200-203.
[4] Bassiou N,Kotropoulos C.Color image histogram equalization by ab-solute discounting back-off[J].ComputerVisionandImageUnder-standing,2007,107(1-2):108-122.
[5] 韩思奇,王蕾.图像分割的阈值法综述[J].系统工程与电子技术,2002,24(6):91-94.
[6] 谢志江,陈涛,楚红雨,等.热态重轨表面缺陷在线检测方法及关键技术[J].重庆大学学报,2012,35(3):15-18.
[7] 王凤朝,刘兴堂,黄树采.基于模糊证据理论的多特征目标融合检测算法[J].光学学报,2010,30(3):713-717.
[8] 张学武,燕琼,闫萍.一种基于红外成像的强反射金属表面缺陷视觉检测方法[J].光学学报,2011,31(3):1-8.
[9] Kubota N,Sasaki H.Genetic algorithm for a fuzzy spiking neural network of a mobile robot[C]//CIRA 2005,International Symposium on Computational Intelligence in Robotics and Automation,Espoo,Finland,2005:2410-2415.
Study on the Key Technology of Hot Rolling Heavy Rail
Surface Faults of Online Detecting and Recognition
XIE Zhi-jiang, XIE Chang-gui
(State Key Lab of Mechanical Transmissions,Chongqing University,Chongqing 400044,China)
In currently hot rolling heavy rail surface faults detecting,speed is slow and its precision is low.So a suit of surface defectdetection system for hot rolling heavy rail based on themachine vision is produced.Too dark and sun regional overlapping fusion method and image correlation between pixel lines algorithm is analysised,and a fuzzy spiking neural network used tomake a classification for the characteristics of low SVM training algorithm is researched.Using above key machine vision technology for detection of hot heavy rail surface defects identification,the speed and accuracy of online testing can be greatly improved,and the detection correction rate is over than 90%.
Metrology;Machine vision;Fault recognition;Hot rolling heavy rail;Detecting accuracy
TB96
A
1000-1158(2014)02-0139-04
10.3969/j.issn.1000-1158.2014.02.09
2012-05-31;
2012-08-10
国家自然科学基金委员会与中国工程物理研究院联合基金资助(10976034)
谢志江(1962-),男,湖南双峰人,重庆大学教授,博士,主要研究方向为设备监测诊断与图像处理。xzj99@vip.sina.com
猜你喜欢
数学物理学报(2022年3期)2022-05-25
小哥白尼(军事科学)(2022年2期)2022-05-25
山西冶金(2020年2期)2020-06-11
数学物理学报(2019年5期)2019-11-29
红领巾·萌芽(2019年8期)2019-08-27
中成药(2017年12期)2018-01-19
中国与非洲(法文版)(2017年10期)2017-11-23
CHIP新电脑(2016年3期)2016-03-10
雷达学报(2014年4期)2014-04-23
长江大学学报(自科版)(2014年1期)2014-03-20