基于Petri网的高速机器人果奶包装生产线设计方法
2014-06-05 09:50:16梅江平曹家鑫胡立红
天津大学学报(自然科学与工程技术版) 2014年2期
梅江平,曹家鑫,张 新,胡立红
基于Petri网的高速机器人果奶包装生产线设计方法
梅江平,曹家鑫,张 新,胡立红
(天津大学机械工程学院,天津 300072)
针对国内饮料行业产品包装生产线升级换代的问题,提出了一种以高速搬运机器人为核心的新型果奶包装生产线设计方法.首先,基于果奶包装生产线的工艺分析,提出用机器人代替人工的新型生产线布局形式;其次,利用Petri网技术建立了该生产线模型,并基于不变量的方法分析了生产线系统的可达性、安全性、无死锁性;最后,在实验测得各个工作站作业时间的基础上,利用EM-Plant软件对生产线进行了仿真.分析和仿真结果表明,采用机器人的新型果奶包装生产线方案可行且有效.
机器人;包装生产线;Petri网;EM-Plant
随着科学技术的不断发展,机器人技术越来越广泛地应用于军工、医疗、服务等行业中,在提高工作效率、加强产品质量、保障安全生产等方面发挥着重要作用[1].近几年,市场竞争愈演愈烈,对产品质量的要求也越来越高,尤其针对食品、饮料等行业,国家出台了各种卫生条件、生产环境等政策法规,禁止某些工艺采用人工操作以避免二次污染.无人化生产已成为一种必然趋势,为此,国内众多饮料、食品生产商面临生产线更新换代的需求.
目前,在我国饮料等包装行业,诸如吸管投放、装箱、码垛等大部分工序仍依赖人工完成,工人劳动强度大,容易造成对产品的二次污染.笔者提出了一种基于高速和重载搬运机器人的新型果奶包装生产线,分析该包装生产线的工艺流程并进行布局研究,建立该生产线的Petri网模型,基于不变量的方法分析生产线系统的可达性、安全性、无死锁性.同时,通过EM-Plant软件对生产线进行仿真.分析和仿真结果验证了新型包装生产线方案的可行性.最终,将整条生产线应用于娃哈哈集团果奶包装,大大提高了生产效率.
1 生产线工艺分析及布局
1.1 生产线工艺分析
笔者研究的机器人果奶包装生产线,整个流程从单瓶果奶输入、高温杀菌冷却到最终的成品箱码垛,其工艺流程的设计需考虑以下两方面:①工序集中与分散安排合理,工序集中可减少中间输送、储存、转向等环节,工序分散可减小机构的复杂程度,在确保整条生产线运行可靠、生产效率高的前提下合理安排工序;②各工序生产节拍平衡.该包装生产线中传送装置兼有缓冲区功能,为保证生产线连续平稳运行,需确定各工序之间传送带的长度和运行速度.
通过研究分析现有包装生产线工艺流程,确定新型包装生产线的工艺流程如下:①冷却区完成对灌装后的单瓶果奶高温杀菌冷却;②贴标机完成对已冷却的果奶贴标及标签热收缩紧固;③旋盖机完成对贴好标签的果奶旋合加盖;④小字符喷码机完成生产日期等产品信息的喷印工序,之后由分瓶装置进行每4瓶1组的分瓶操作;⑤分瓶后的果奶采用Delta机械人[2]借助视觉系统替代以前的人工完成吸管的投放;⑥膜包装机对带有吸管的4瓶果奶进行膜包,并经膜收缩机紧固外膜;⑦膜包后的果奶经翻瓶输送链由倒瓶变为立瓶,由高速抓放机械手完成每5组为1箱的装封箱操作;⑧成箱的果奶经过螺旋输送装置经由天桥输送到码垛区,由重载码垛机器人[3]完成码垛.
1.2 生产线布局研究
结合车间实际情况并考虑调整维修方便,本生产线布局采用连续U型方式,物品运行方向的改变由转弯、螺旋输送装置完成,整条生产线布局紧凑,具有很高的灵活性[4].生产线布局如图1所示,该布局中,整条生产线缓冲区主要为传送带等输送装置,缓冲容量的大小可通过改变传送带的长度与输送速度来调节;在吸管投放区、装箱区与码垛区采用高速和重载搬运机器人代替人工操作;为提高工作效率,吸管投放单元采用串联排列、并联工作的双机械手布置方式.

图1 机器人果奶包装生产线布局Fig.1 Layout of the robot fruit-milk packaging line
2 基于Petri网的生产线分析
Petri网[5-6]理论是在1962年由Petri博士提出的,能对离散事件系统中的顺序、并发、冲突、同步、共享等问题建立模型并加以分析.基本Petri网通常用5元素PN={P,T,I,O,M0}来表示,其中P,T,I,O,M0分别表示库所集(圆形节点表示)、变迁集(方形节点表示)、输入函数、输出函数和标识.在笔者研究的饮料包装生产线中,库所集P表示整条生产线中各设备的准备状态,如贴标机标签到位、装箱机纸箱到位等;变迁集T表示整条生产线中各道工序,如果瓶加盖、纸箱供给等环节;I和O分别表示库所集与变迁集之间的输入、输出有向弧集;M0表示初始状态时各个库所中所包含的托肯数.
2.1 生产线Petri网模型建立
基于Petri网的概念,状态只能在离散时间点上瞬时发生变动,为此,假设某道工序完成立即进入下一道工序,以忽略生产线中各道工序之间的时间因素,从而得到Petri网模型各库所、变迁意义如表1所示.
由表1可以看出,整条包装生产线工序较多,相应建立的Petri网模型较复杂.而在Petri网中进行系列库所和系列变迁的融合(即将多个库所、变迁组成的纯串联子模型简化为由1个库所、1个变迁组成的简单模型)并不会改变其可达性、安全性和有界性,所以可通过这两种变换操作对Petri网进行简化.例如将系列库所及变迁→P1→T2→P2→融合进库所→P2→.融合后Petri网模型如图2所示,各库所、变迁保留其意义.
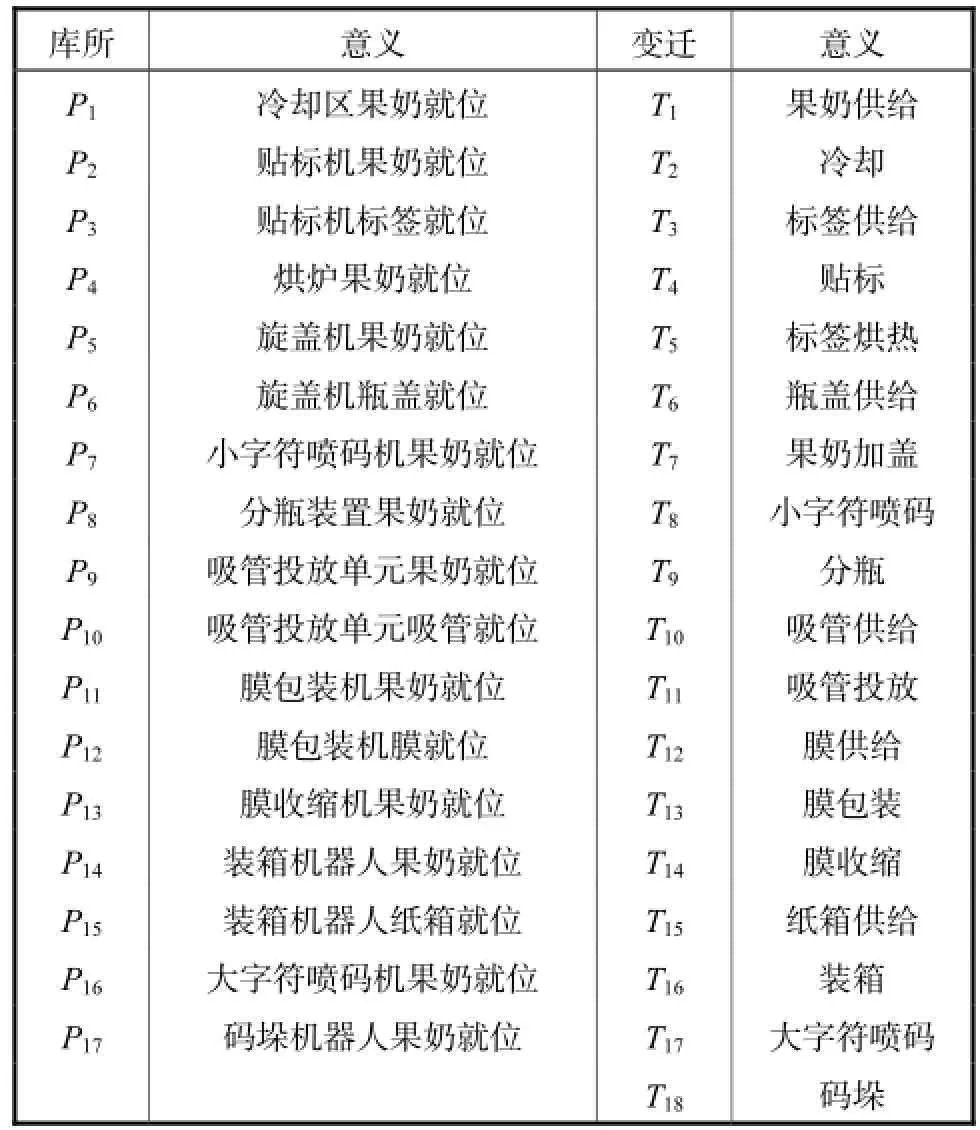
表1 库所和变迁意义Tab.1 Representation of P and T

图2 生产线Petri网简化模型Fig.2 Petri net model of the production line
2.2 生产线Petri网模型分析
对建立的Petri网模型,运用基于不变量的方法分析模型性质.模型的Petri网状态方程为

式中:M为后继标识(经一系列变迁X后各个库所集P中包含的托肯数);mi为库所Pi中包含的托肯数;C为关联矩阵;xi为变迁Ti的发生次数,xi≥0.
若系统经一系列变迁X后,再次回到初始状态,即

则称X为T的不变量,CX=0.
由生产线简化Petri网模型可得到
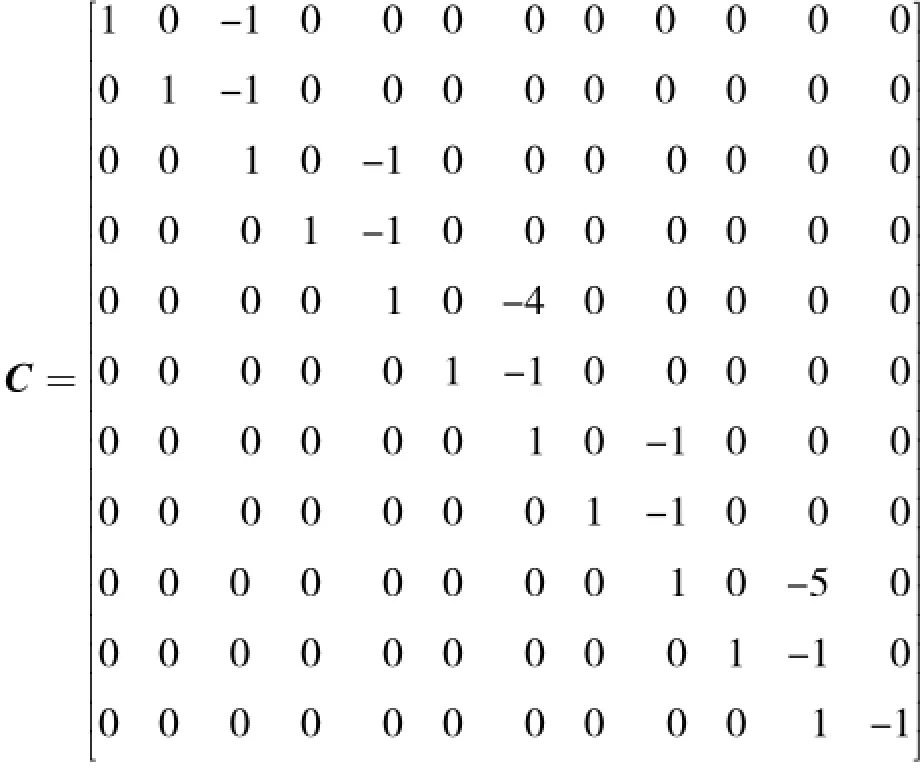
由于矩阵C的秩rank C=11,其列数是12,所以方程CX=0有非零解且是无穷多解,其基础解为X= [20,20,20,20,20,5,5,5,5,1,1,1]T.因此,该饮料包装生产线的简化Petri网模型的T不变量存在,说明该Petri网模型是可达的、活的而且是有界的[7-8].可达性说明整条果奶包装生产线可以按照一定的规则连续运行,并且经过一系列变迁可完成从初始状态到指定的可达状态再回到初始状态的循环;有界性说明整条生产线的硬件配置、整体布局合理,在运行过程中不会出现资源溢出的现象;活性说明生产工艺安排恰当,在运行过程中不会因资源竞争等发生死锁情况,保证了整条生产线的顺利运行.
3 生产线仿真与应用
3.1 各工作站时间测定
通过马表测时法并考虑绩效评比系数及时间放宽系数,得到各工作站对单瓶果奶作业时间,如表2所示.其中根据需求,绩效评比系数及时间放宽系数分别取1.0和1.05.

表2 工作站作业时间Tab.2 Work station time
3.2 EM-Plant建模仿真分析
为对生产线进行平衡分析和瓶颈分析,评价所规划设计的生产线性能并验证设计方案的可行性,采用EM-Plant软件进行生产线系统平衡仿真.为便于仿真,提出以下合理假设:①在仿真过程中,各工作站与传送装置运转正常,工人及其他原材料资源充足,不会因意外原因导致停机;②整条生产线的输入部分(经冷却后的果奶)供给充足,输出部分(出货区)不会出现成品堆积,即码垛后的成箱果奶由叉车及时运走.
根据上述果奶生产线的生产流程及布局形式,建立了高速机器人果奶包装生产线仿真模型,如图3所示,SingleProc表示工作单元,即生产线上的各设备,其中贴标机、装箱机器人等工作单元的逻辑控制和相应功能通过Method中的程序来完成,在ShiftCalendar中完成生产时间工作制设置,为3班工作制,EventController中设置仿真时间为30,d[9-10].
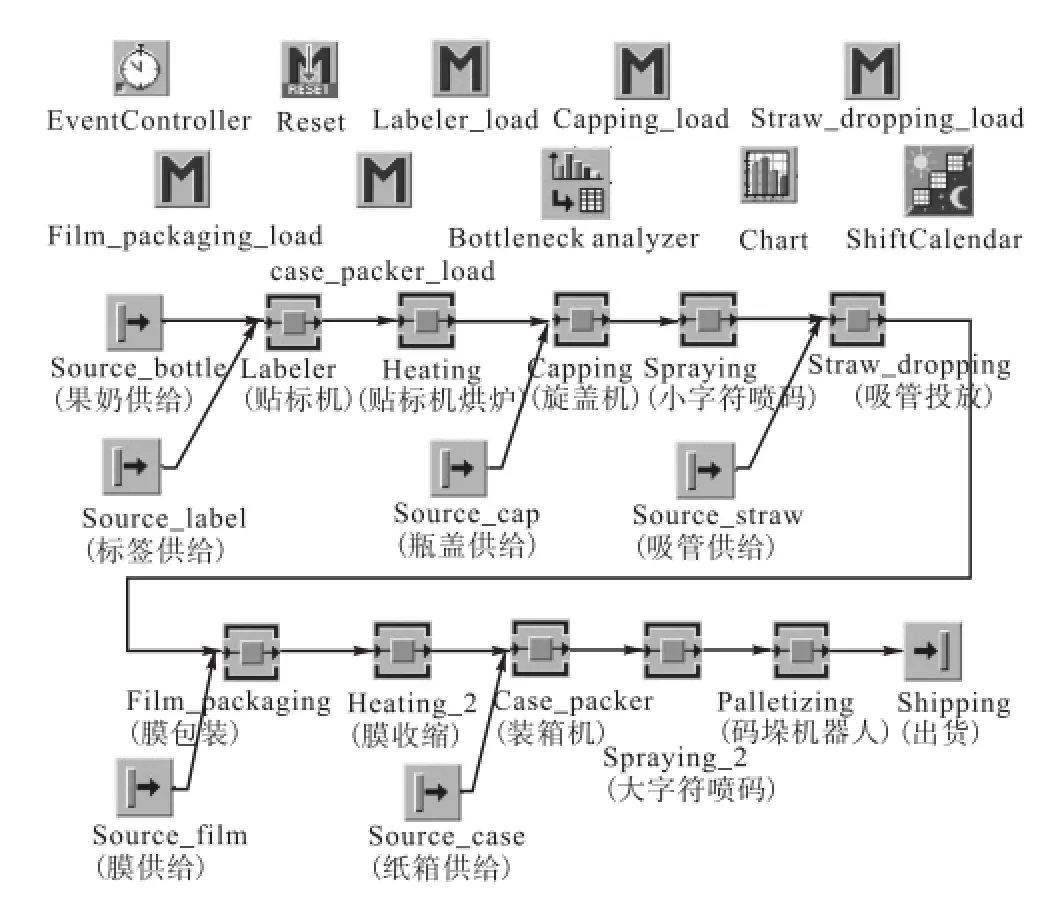
图3 生产线EM-Plant仿真模型Fig.3 EM-Plant simulation model of the production line
按照表2设置各个包装设备的作业时间后,运行仿真得到结果如图4所示.
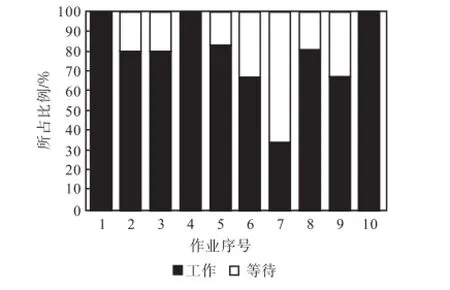
图4 各工作站工作状态Fig.4 Status of work stations
各个设备可能存在工作、等待、堵塞3种状态.从各个工作站的工作状态,可以看出贴标机、小字符喷码机、码垛机器人一直处于满负荷工作状态,为生产线的瓶颈工序;除膜收缩机外,其余工作站工作状态所占比例均大于60%,设备利用率高;此外,生产线平衡率高,且生产线不会出现堵塞现象,说明新型高速机器人果奶包装生产线方案可行.
3.3 生产线应用
整条生产线已实际应用于娃哈哈集团果奶包装线(图5为吸管投放单元与码垛机器人实体图),并根据仿真结果中的瓶颈工序做出相应改进:在贴标机、码垛机器人处采取双机并联方式,适当加大旋盖机与小字符喷码机之间的缓冲区域.改进后的生产线设计基本消除了瓶颈工序,实际测得贴标机与码垛机器人工作状态所占比例降为85%左右,小字符喷码机工作状态降为75%左右,其他设备的工作状态与仿真结果相符,大大提高了生产效率.
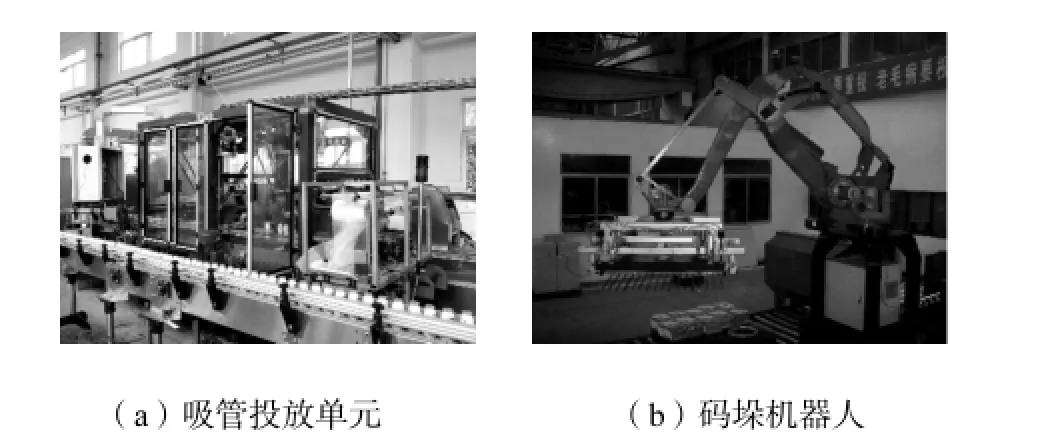
图5 吸管投放单元与码垛机器人Fig.5 Straw-dropping unit and palletizing robot
4 结 语
笔者基于机器人果奶生产线的工艺分析及布局研究,建立了生产线的Petri网调度模型,并通过不变量理论证明了系统的可达性、有界性和无死锁性;建立了生产线的EM-Plant模型,通过仿真得到了各个工作站的工作状态,各工作站设备利用率高,且整条生产线无堵塞现象,证明了方案的可行性.
在国家科技重大专项的资助下,该机器人果奶生产线已在娃哈哈集团得到示范应用,根据仿真结果在实际应用中对整条生产线做了相应改进,大大提高了其生产效率.
[1] Meng Fei,Zhang Haiou,Wang Guilan. Application of industrial robot in rapid prototype manufacturing technology[C]//2010 2nd International Conference on Industrial Mechatronics and Automation. Wuhan,China,2010:218-220.
[2] 梁香宁,牛志刚. 三自由度Delta并联机器人运动学分析及工作空间求解[J]. 太原理工大学学报,2008,39(1):93-95.
Liang Xiangning,Niu Zhigang. Kinematic analysis and workspace solving of three dof Delta parallet robot[J]. Journal of Taiyuan University of Technology,2008,39(1):93-95(in Chinese).
[3] 李成伟,贠 超. 码垛机器人机构设计与运动学研究[J]. 机械设计与制造,2009(6):181-183.
Li Chengwei,Yun Chao. Stacking robot kinematics design and research institutions[J]. Machinery Design and Manufacture,2009(6):181-183(in Chinese).
[4] Zhang Liangan,Mei Jiangping,Zhao Xueman,et al. Reformation of the transfusion bags' secondary packaging line using parallel robot [C]// Proceedings of the 2007 IEEE International Conference on Mechatronics and Automation. Harbin,China,2007:2043-2048.
[5] 江志斌. Petri网及其在制造系统建模与控制中的应用[M]. 北京:机械工业出版社,2004.
Jiang Zhibin. Petri Net and Its Applications in the Modeling and Controlling of Manufacturing System[M]. Beijing:China Machine Press,2004(in Chinese).
[6] 袁崇义. Petri原理[M]. 北京:电子工业出版社,1998.
Yuan Chongyi. Theory of Petri[M]. Beijing:Publishing House of Electronics Industry,1998(in Chinese).
[7] Russo M F. Modeling,analysis,simulation,and control of laboratory automation systems using Petri nets:Analysis and control[J]. JALA Tutorial,2008(4):103-115.
[8] 王云鹏,李善兴,王占中,等. 基于Petri网的汽车制造业生产物流流程优化[J]. 吉林大学学报,2008,38(2):59-62.
Wang Yunpeng,Li Shanxing,Wang Zhanzhong,et al. Optimization of production logistics process of automobile manufacture enterprise based on Petri net[J]. Journal of Jilin University,2008,38(2):59-62(in Chinese).
[9] 刘光富,马婷婷. 基于EM-Plant的装配线平衡分析[J]. 工业工程与管理,2007,12(3):104-108.
Liu Guangfu,Ma Tingting. An analysis on the assembly line balancing based on EM-Plant[J]. Industrial Engineering and Management,2007,12(3):104-108(in Chinese).
[10] 杨 堃. 基于EM-Plant的生产物流系统仿真与应用[J]. 工业工程,2010,13(5):95-100.
Yang Kun. EM-Plant-based simulation and optimization of production process[J]. Industrial Engineering Journal,2010,13(5):95-100(in Chinese).
(责任编辑:金顺爱)
Design Method of High-Speed Robot Fruit-Milk Packaging Line Based on Petri Net
Mei Jiangping,Cao Jiaxin,Zhang Xin,Hu Lihong
(School of Mechanical Engineering,Tianjin University,Tianjin 300072,China)
To solve the problem that the production packaging line of domestic beverage industry needs upgrading,a new design method of fruit-milk packaging line using high-speed robot is proposed. Firstly,based on the packaging process analysis,the layout of the line is presented,in which industry robots are applied instead of labor. Then the Petri net model is built and the attainability,boundary and reversibility of the system are proved by the theory of invariant. Finally,the work station time is obtained experimentally,based on which,the line is simulated by EMPlant. The analysis and research above show that the new design method is feasible and effective.
robot;packaging line;Petri net;EM-Plant
TP23
A
0493-2137(2014)02-0138-05
10.11784/tdxbz201206036
2012-06-18;
2012-09-25.
国家科技重大专项资助项目(2011ZX04013-011).
梅江平(1969— ),男,博士,副教授.
梅江平,ppm@tju.edu.cn.
猜你喜欢
今日农业(2022年16期)2022-11-09 23:18:44
电子器件(2021年1期)2021-03-23 09:24:02
装备制造技术(2020年3期)2020-12-25 05:22:06
电脑报(2020年32期)2020-09-06 13:55:22
重型机械(2020年3期)2020-08-24 08:31:48
电子制作(2019年20期)2019-12-04 03:51:36
华侨大学学报(自然科学版)(2014年4期)2014-10-11 06:23:42
吉林大学学报(工学版)(2014年1期)2014-04-12 00:32:08
机电信息(2014年23期)2014-02-27 15:53:31
制造技术与机床(2012年3期)2012-09-26 09:31:46