大功率在线UPS高频整流器充电控制策略研究*
2014-05-26 11:21:16邢丽坤
重庆工商大学学报(自然科学版) 2014年3期
伍 龙,邢丽坤
(1.淮南师范学院,安徽淮南 232001;2.安徽理工大学,安徽淮南 232001)
目前,市场上的UPS多采用恒压限流充电方式,其不足之处在于:若恒压转化值设定的过高,会导致蓄电池失水率增加,同时有发生“热失控”的危险;若转化值设定过低,不但充电速度慢,而且充入电量低,长此以往,未转化的活性物质会产生不可逆转的高阻性钝化结块,使蓄电池容量永久降低[1]。而传统UPS中整流环节都采用不控桥式整流,使得电流中谐波含量很高,不但使蓄电池极板表面严重氧化,导致充电不足,蓄电池容量下降,而且在充电过程中的电能浪费也是非常惊人的[2]。针对以上不足,采用一种更为先进的三段式充电方式,引入高频整流技术,将传统UPS中不控整流电路,充电电路以及PFC电路用三相电压型PWM整流器进行取代,同时,采用基于同步旋转坐标系下的VSR双闭环滑模控制算法[3],仿真结果表明,控制策略既实现了PWM整流器的单位功率因数运行,又实现了直流电压的快速跟踪,完成从恒压充电方式至浮充充电方式的平滑切换,同时增强了直流侧电压的稳定性和鲁棒性。
1 三段式充电方式工作特性
所采用充电方式将先进的电池监测技术(Advanced Battery Monitoring)与智能化电池充电技术(Intelligent Battery Charging)相结合,来优化电池运行状态。以松下密封免维护铅酸电池为例,电池单体电压为12 V,容量为12 AH,备用时充电电压为13.5~13.8 V,循环使用时充电电压为14.4~15.0 V,最大初始充电电流为2.25 A。充电方式分为三段式输出,其充电特性如图1所示。在充电初期,为了避免充电电流过大,采用恒流充电方式,将充电电流稳定在0.18 C,充电电压基本保持线性上升,阶段可以预防过流充电的发生。待蓄电池端电压达到恒压转化值14.6 V以后,便进入恒压充电阶段,在这一阶段中,充电电压保持不变,充电电流以指数变化规律减小,当充电电流降低至0.2 A时,充电电路自动转为浮充充电模式,以13.6 V的单体蓄电池浮充电压对电池组进行恒压浮充,由于引入浮充充电方式,使得恒压转化值的设定高于普通恒压限流方式,既能保证前期充入足够的电量,又可以避免后期的过充电现象。同时浮充充电还可以补偿自放电造成的电量损失,使电池电量始终保持在充足的状态下,蓄电池中活性物质利用率达到较高水平,显然,这种充电方式对延长蓄电池的寿命是非常有帮助的。

图1 三相电压型PWM整流器主拓扑结构
2 三相电压型PWM整流器数学模型
三相电压型PWM整流器主拓扑如图1所示。图1中,ek,ik,uk(k=a,b,c)分别为网侧各相电源电压、电流和整流器各相输入电压,L为交流侧滤波电感,R为电感及开关管损耗二者等效电阻之和,直流侧电容C稳定直流电压和抑制谐波电压,直流侧负载为电阻和反电动势直流电源串联。
在三相静止坐标系中,PWM整流器模型中各相变量相互耦合,且为时变的交流量。其d-q旋转坐标系下的数学模型为

式(1)中:Idc=3(sdid+sqiq)/2;ud=sdUdc;uq=sqUdc。下标“d,q”分别表示各变量在d-q旋转坐标系下的有功和无功分量。
3 VSR双闭环滑模算法设计
为了实现整流器网侧电流正弦化且单位功率因数运行以及直流侧电压的快速调节,一般采用双闭环控制。电压外环控制直流侧的电压,而电流内环根据电压环输出的电流指令进行交流侧电流的控制。
采用滑模变结构控制设计PWM整流器电流环。其在滑动模态区具有不受控制对象参数和外部扰动影响的完全鲁棒性,因此可以提高电流的动态响应和稳态性能。
根据电流环控制要求和滑膜变结构控制论,首先设计两个滑模面函数:

由式(1)可知两个滑模面是对id、iq稳定状态的跟踪。对上式两边求导可得:


显然此趋近律满足滑膜到达条件:Sk=Sk[-εksat(Sk)-KkSk]<0,(εk>0,Kk>0,k=1,2)。
因此,联立式(2)、式(3)、式(4)可得电流内环滑膜控制律:

根据式(5)来设计电流内环滑膜控制器。由于通过(5)式直接得到的Sd、Sq是连续函数,需要将其离散化后经过坐标变换形成开关函数Sk(k=a,b,c),再通过建立开关表的方式控制三相功率管的开关状态。为了避开将连续量离散化等问题,根据式=udcSd=udcSq得到和两个控制变量,以此新的控制量作为输入,通过固定开关频率的SVPWM调制技术得到整流桥的控制脉冲。
PWM整流器的电压外环采用PI调节器,其作用是稳定直流侧电压,因此,设计时主要考虑电压环的抗扰动性。负载扰动和电网电压波动都会影响母线电压的稳定性。为了提高系统的抗干扰能力,减小直流侧电压产生的波动,控制策略最根本的原则就是保持PWM整流器交直流侧之间的功率平衡。理想状态下的功率平衡关系为

式(6)中:为交流侧输入功率;PC,PL分别为直流侧电容和负载吸收的功率。当忽略开关器件的开关损耗和线路损耗,则(6)式可写为

采用电网电压定向方式时,eq=0,ed=Em(Em为电源电压最大值);由于电流环具有快速的动态性能,一般忽略电流环的调节过程,因此,id=。由于运行在单位功率因数0;令采用电压PI调节和前馈补偿共同输出,结合式(7),则有功电流指令值表示为:

由式(8)可知,电流环指令值由电压PI调节输出(负责电容充放电)和前馈信号(根据负载和电网电压变化调整输入输出功率)两部分组成,达到保持功率的平衡关系。当系统进入稳态时直流侧电容吸收功率为零,则由式(8)可得:

式(9)表明当系统达到稳态时,直流母线电压不会受负载变化和电网电压波动的影响,提高了系统稳态时的抗干扰能力。
4 仿真结果及分析
图2是三相电压型PWM整流器滑模控制框图,该系统采用SVPWM整流器取代传统UPS中的整流、充电以及PFC 3个电路模块,并通过对PWM整流器的控制来实现三段式充电方式,为了实现各充电阶段的平滑切换,系统采用了基于同步旋转坐标系下的电流闭环滑模控制策略。仿真参数为:交流侧三相对称电网电源380 V/50 Hz,网侧输入电感L=5 mH,等效电阻R=0.5 Ω,直流侧滤波电容C=2 000 μF,给定直流母线电压600 V,阻性负载25 Ω,开关频率5 kHz,直流反电动势еL=800 V。控制器参数为:电压环kP=0.25,ki=10,kv=400;电流环 ε1=ε2=2.5,K1=1 600,K2=2 100。仿真结果见图 3 ~图8。

图2 三相电压型PWM整流器滑模控制框
在三段式充电过程中,当系统从恒压充电模式转为浮充充电模式时,考虑输出电压指令值变化,并且负载也在此时发生突变,系统的动态响应波形如图3所示。可以看出直流侧电压较好地跟踪了指令输出值,实现平滑切换,超调振荡小,鲁棒性强,响应在0.02 s左右。
系统在整流状态下,图3和图4为负载在0.2 s时从25 Ω突变为12.5 Ω的直流侧电压波形和交流侧A相电压、电流波形。从图3可以看出负载突变时,直流侧电压波动很小且迅速恢复到稳态值;图4中,0.2 s时负载减为一半,交流侧输入电流畸变率很小能迅速跟踪负载的变化。图5和图6为在0.2 s时电网电压突增15%后的直流侧电压波形和交流侧A相电压波形。可以看出在前馈补偿控制下,当电网电压波动时,直流侧电压只有很小的波动,且交流侧电流畸变率小并能以单位功率因数运行。

图3 直流母线电压响应波形
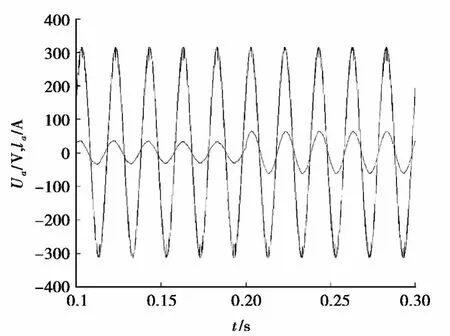
图4 负载突变时交流侧A相电压和电流
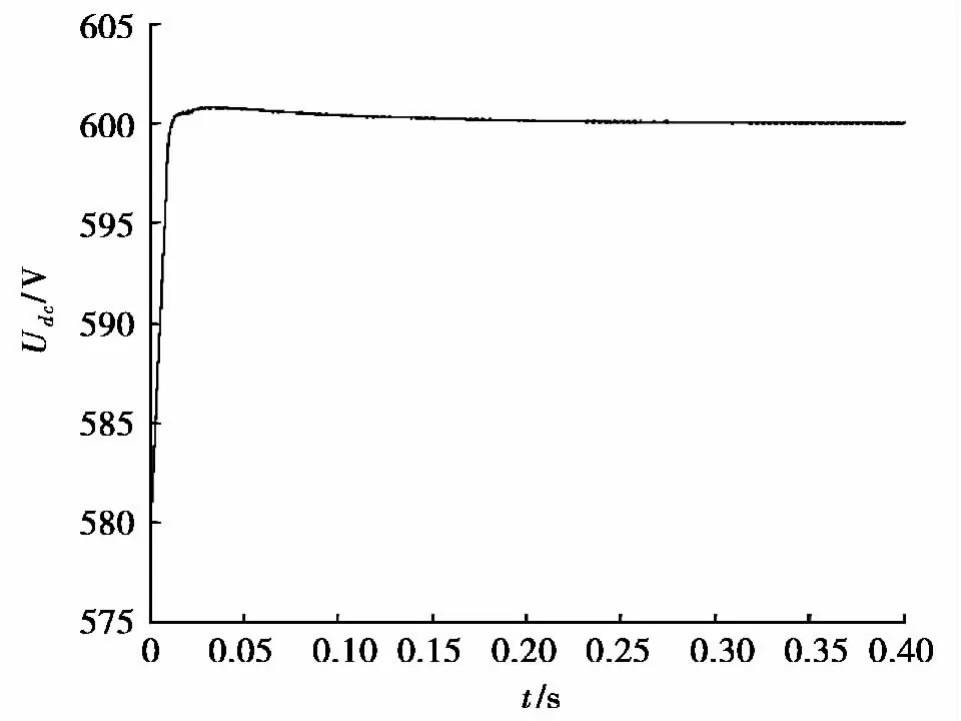
图5 电网电压扰动时直流母线电压

图6 电网电压扰动时交流侧A相电压

图7 整流到逆变时直流侧电压

图8 整流到逆变时A相电压和电流
图7和图8为系统从整流转换为逆变时的直流侧电压和交流侧A相电压、电流波形。在0.2 s时,直流侧通过5 Ω电阻接入一个800 V的外加直流电源从而实现逆变运行;图7可以看出,直流侧电压在系统从整流变成逆变状态是只有很小波动幅度,且动态响应快。图8显示在整流状态下交流侧电流与电压同相,在0.2 s时电流反相,系统运行在逆变状态。仿真结果表明,系统无论是运行在整流状态还是逆变状态,其交流侧电流波形畸变很小,且可以做到单位功率因数,实现了能量的双向流动。
5 结语
研究了电压型PWM整流器的一种能量可双向流动的控制策略,即电压外环为前馈补偿加输出电压反馈控制,电流内环为滑膜控制。基于输入和输出功率平衡关系,电压外环采用了同时包含负载电流和电网电压信息的反馈控制,有效地提高了直流侧电压的抗干扰性能。电流内环利用滑膜控制的抗扰动性和良好的动态响应能力,因而能够获得较高的稳态精度和良好的跟踪性能。仿真结果表明,在所研究控制策略下,系统具有很好的抗干扰能力和动静态性能,实现了高功率因数运行和能量的可双向流动。
[1]张崇巍,张兴.PWM整流器及其控制[M].北京:机械工业出版社,2003
[2]王俊.基于滑模控制的煤矿直流牵引整流器设计与仿真[J].煤矿机械,2012(4):102-104
[3]单栋梁,宋书中,马建伟,等.能量回馈式电压型PWM整流器的研究[J].工矿自动化,2010(3):20-24
[4]李剑林,田联房,王孝洪,等.PWM整流器负载电流前馈控制策略研究[J].电力电子技术,2011(4):56-58
[5]WEI K,WANG S.Modeling and simulation of three-phase voltage soure PWM rectifier[C].International Conference on Advanced Computer Theory and Engineering,Phuket,Thailand,2008:982-986
猜你喜欢
舰船科学技术(2022年10期)2022-06-17 06:26:42
建材发展导向(2021年14期)2021-08-23 00:57:20
装备制造技术(2021年2期)2021-07-21 05:38:56
科学家(2021年24期)2021-04-25 17:55:12
通信电源技术(2016年4期)2016-04-04 02:57:16
通信电源技术(2016年5期)2016-03-22 01:09:57
中国组织化学与细胞化学杂志(2016年3期)2016-02-27 11:15:41
电源技术(2015年1期)2015-08-22 11:16:26
电测与仪表(2015年12期)2015-04-09 11:44:44
西南医科大学学报(2014年6期)2014-03-20 15:43:47