基于Kinect传感器的织物悬垂性测试
2014-05-25 00:35:49孙西超
浙江理工大学学报(自然科学版) 2014年5期
沈 伟,任 静,周 华,孙西超
(浙江理工大学材料与纺织学院,杭州310018)
基于Kinect传感器的织物悬垂性测试
沈 伟,任 静,周 华,孙西超
(浙江理工大学材料与纺织学院,杭州310018)
织物的悬垂性能测试多局限于二维测试,不能直观地反映织物的三维外观形态。提出了一种新型测试方法,能够直接扫描得到织物的三维外观形态。通过Kinect传感器从试样的多个位置获取深度图像,建立三维场景,通过C++编程和图像处理软件的处理,提取试样的悬垂性能指标。将其与传统测试法获取的悬垂性能指标作比较,发现两者具有高度的相关性,从而验证了用Kinect传感器扫描获取试样的悬垂性能指标的测试方法具备可行性。
织物悬垂性;三维悬垂性;Kinect传感器;测试方法
0 引 言
织物悬垂性是指织物因自身重量而下垂的性能,它是影响织物视觉风格和美学舒适性诸多因素中最重要的因素之一,关系到织物实际使用时能否形成优美的曲面造型和良好的贴身性。对织物悬垂性能的评价,包括织物悬垂程度和悬垂形态两方面[1]。悬垂程度主要是指织物在自然下垂稳定之后其曲面下垂程度的大小,而悬垂形态主要是指织物悬垂曲面的三维外观形态。目前对于织物三维悬垂形态的测试比较困难,主要有利用传统的织物悬垂性测试方法(FRL)[2]得到悬垂系数、平均峰高、平均峰宽等这几个悬垂指标进行三维重建[3]和通过图形图像处理技术进行三维重建[4],此类方法操作复杂、步骤繁琐,并不能直观反映织物的三维外观形态。三维扫描仪主要是通过获取织物的深度图像进行三维重建,而这类三维扫描仪扫描条件苛刻,加上价格因素和操作复杂等原因,无法运用在织物的三维悬垂性能测试上。目前对于织物的三维悬垂形态研究还处在探索阶段。
本文采用的Kinect传感器性价比高、扫描精度符合实验要求、操作简便。由Kinect传感器构成的三维扫描仪能够直观地扫描织物的三维外观形态,通过编程和图像处理提取二维悬垂性能指标,并与仪器测试法测得的数据指标相比较;验证由Kinect传感器构成的三维扫描仪是否适用于纺织品的传统悬垂性能测试,能否直观地测得织物三维悬垂形态。
1 伞式法悬垂性能指标测试
织物的悬垂性能指标可分为悬垂程度和悬垂形态两个方面,其中悬垂系数表示织物悬垂程度的大小,其值越大,表示悬垂性越差;悬垂形态可通过波纹数、波峰幅值最大峰高、波峰幅值最小峰高、峰高不匀率、最大夹角、最小夹角、夹角不匀率等指标表示。
选取20块不同悬垂风格的织物,进行伞式悬垂性能指标测试,其规格见表1。试样按照国标GB/T 6529-2008《纺织品调湿和实验用标准大气》进行测试取值,实验采用的仪器为织物动静态悬垂风格仪(YG811),适用于标准GB/T 23329-2009《纺织品织物悬垂性试验方法》[5]所规定的织物静态悬垂系数的测试方法,每块试样测量10次,取其平均值。表2为由YG811仪器测得的伞式悬垂性能指标。
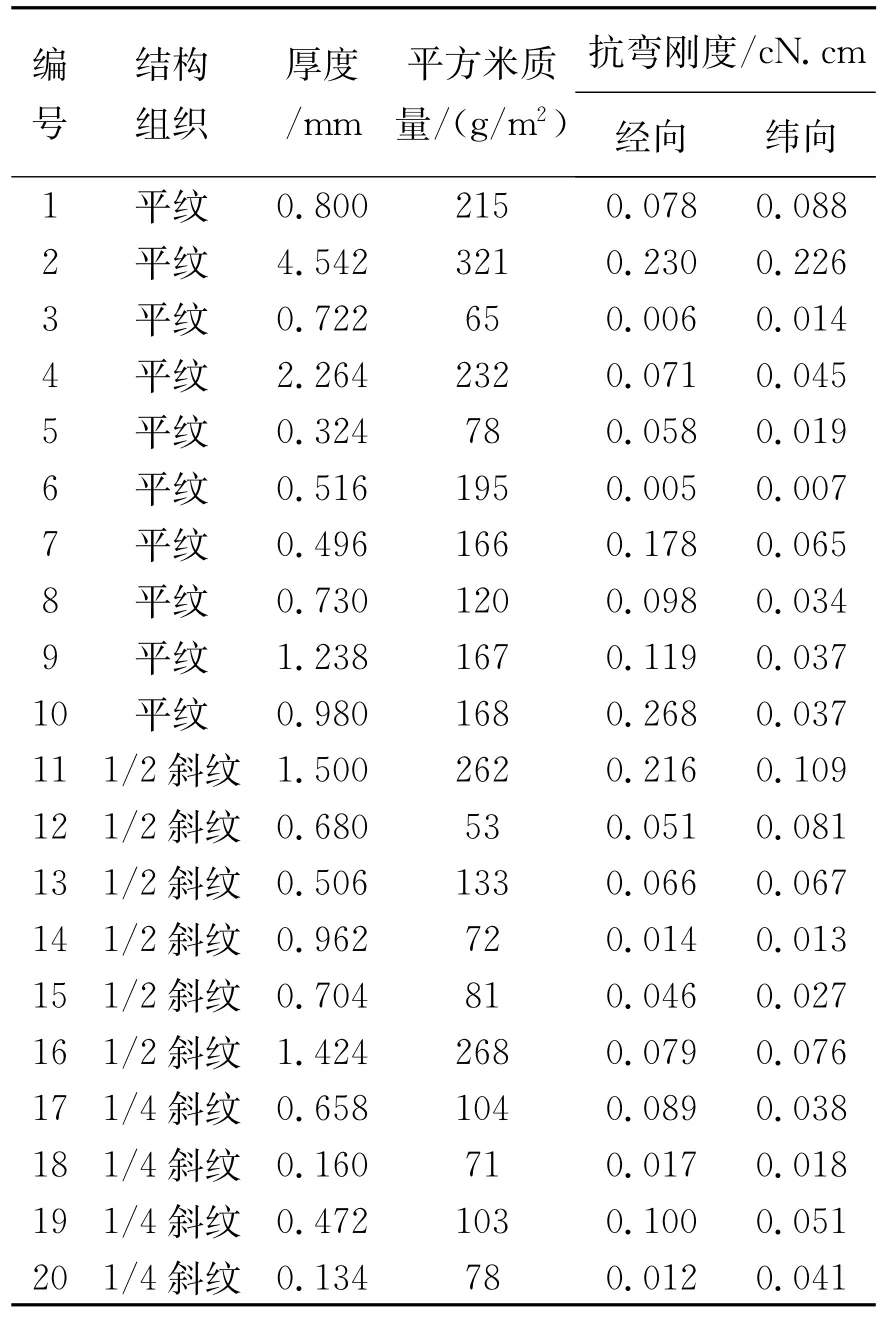
表1 试样规格

表2 伞式悬垂性能测试法测得的性能指标
2 基于Kinect传感器的织物悬垂性测量
2.1 Kincet传感器简介
Kinect传感器是微软公司推出的一款3D体感摄影机,主要由一个1 280×800分辨率的彩色像影头,一个由红外线发射器和红外线摄影机所构成的三维结构光深度感应器,以及麦克风阵列和运动传感器等组成。本实验应用到的深度感应器,其分辨率均为640×480,最大帧率为30帧/s,景深范围为0.4~8 m。本文利用Kinect SDK提供的最新Kinect Fusion[6-7]技术,通过C++编程,实时捕捉和构建实物的三维模型,将Kinect等价为一台廉价的三维扫描仪。
2.2 基于Kinect传感器的伞式悬垂测试
Kinect传感器能够直接捕捉织物的三维外观形态,基本原理是通过Kinect传感器从织物的多个位置获取深度图像,对不同的深度点云进行拼接,将得到的深度图像合成在一个坐标系下,建立三维实体模型,将得到的三维实体模型通过C++编程和图像处理软件的处理,提取试样的悬垂性能指标。与YG811悬垂仪获取的悬垂性能指标进行比较,验证通过Kinect传感器扫描获取试样的悬垂性能指标的可行性。
测试装置如图1所示,织物试样摆放在YG811织物悬垂仪上,Kinect传感器在试样上方0.6 m处,水平圆周移动,向下拍摄,获取试样深度图像。随着Kinect传感器的移动,从多个位置对试样进行扫描,被重复扫描到的位置的重建精度逐渐加强,通过编程,对不同的深度点云进行拼接,最终合并成高精度的三维实体数据模型。
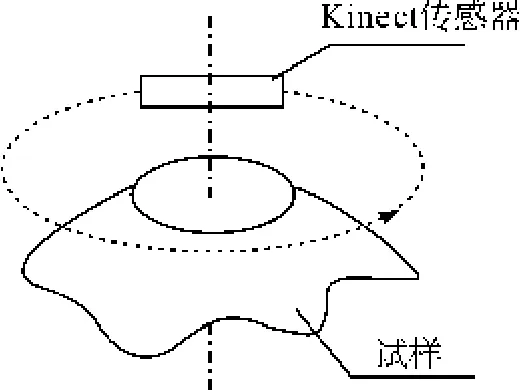
图1 Kinect悬垂测试装置
如图2为Kinect三维悬垂测试装置得到的悬垂测试三维实体模型图。将三维实体模型图通过编程,提取水平面的投影轮廓曲线,作为伞式悬垂测试法的投影,如图3中的周边轮廓。

图2 3D伞式悬垂扫描图

图3 伞式悬垂投影轮廓曲线
图4中的投影轮廓曲线经过消噪处理、波峰识别、投影面积等参数计算,根据图5伞式悬垂示意图得到表3伞式悬垂性能指标。其中波纹数是指织物悬垂投影轮廓线一周中的波峰数。波峰幅值RC是指试样悬垂投影中波峰点至试样托盘边缘点的距离,波峰夹角αc是指相邻两波峰间的夹角。波峰幅值均匀度与波峰夹角均匀度分别为试样悬垂投影轮廓线一周中波峰幅值和波峰夹角的变异系数。伞式悬垂系数、波峰幅值匀称度为CVRC与波峰夹角均匀度CVαc计算公式如下:
悬垂系数

其中,F-悬垂系数;A0-支持圆台面积;A1-试样原面积;A2-悬垂试样投影面积。
波峰幅值匀称度

夹角匀称度
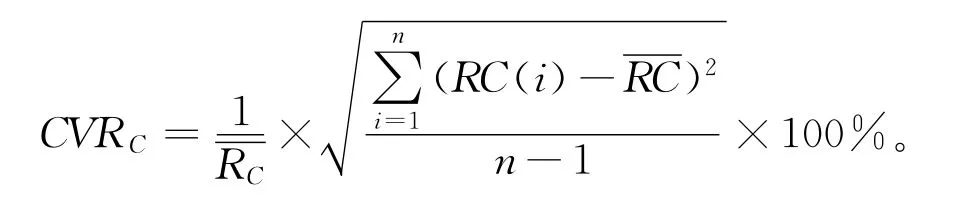

图4 伞式悬垂投影轮廓
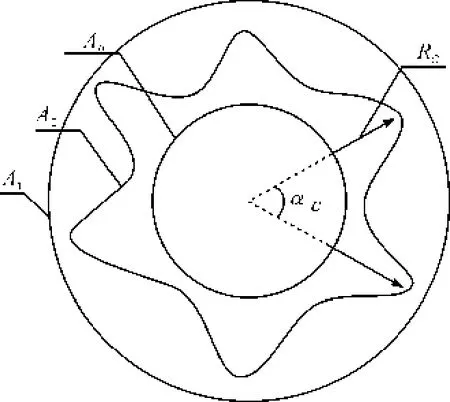
图5 伞式悬垂投影示意图
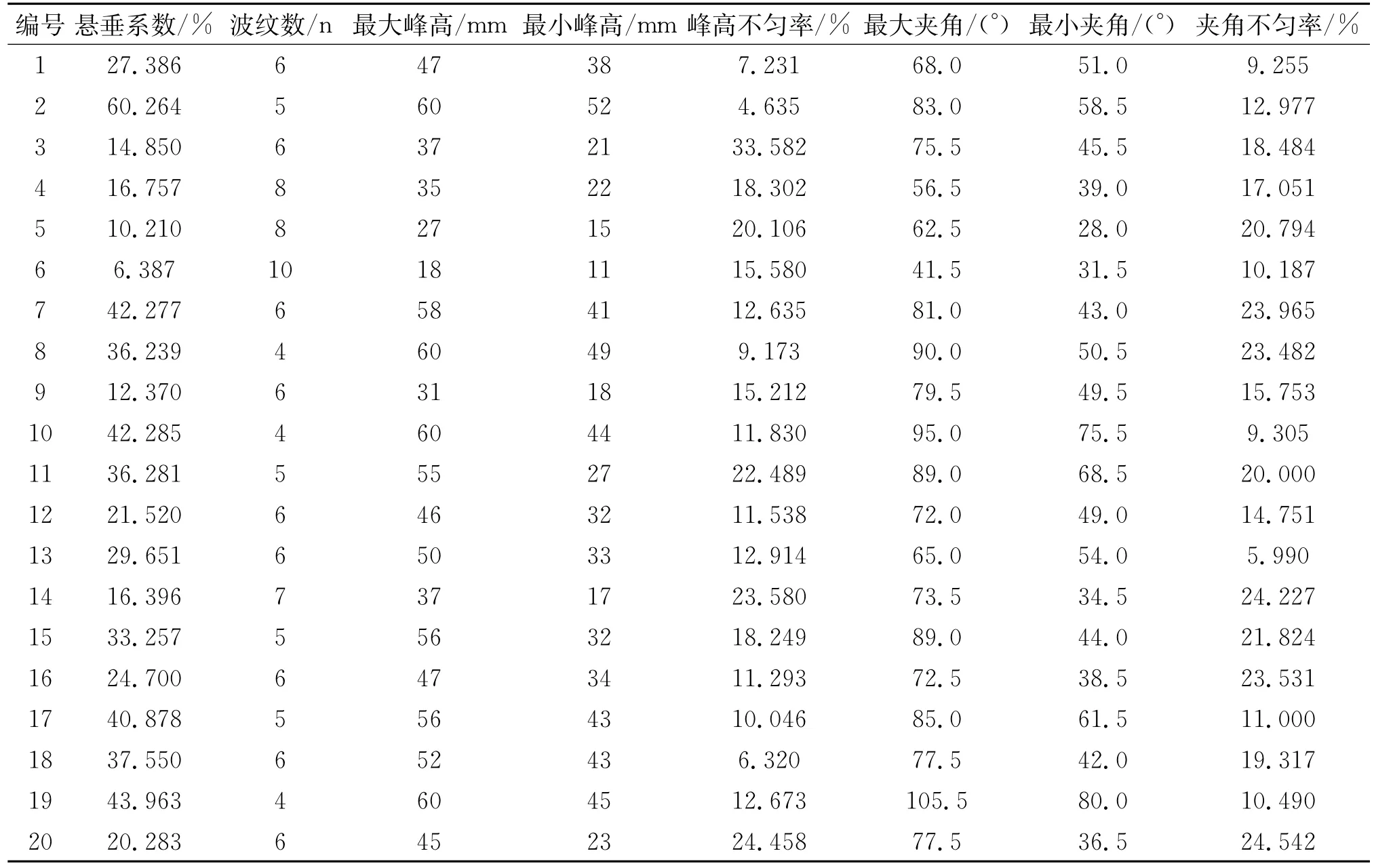
表3 Kinect三维悬垂测试装置的伞式悬垂性能指标参数
3 结果与讨论
为了检验Kinect三维悬垂测试装置得到的数据指标与YG811仪器测得的指标参数相一致,对表2和表3中的悬垂系数用统计软件SPSS 17.0做回归分析。表4为仪器悬垂系数与Kinect悬垂系数的相关性分析结果,图6为散点图。
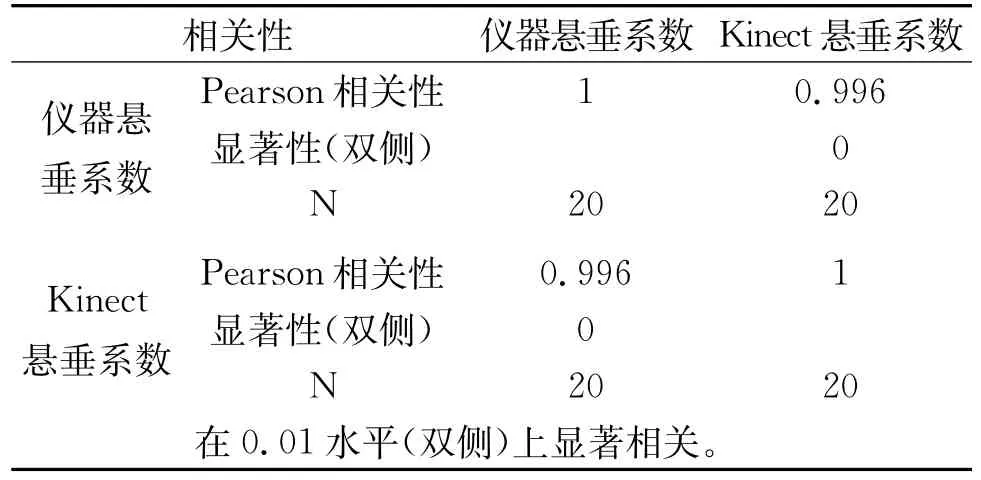
表4 相关性分析结果
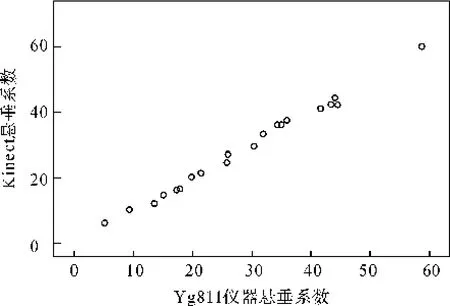
图6 YG811仪器悬垂系数与Kinect悬垂系数相关性散点图
表4给出的仪器悬垂系数与Kinect悬垂系数的皮尔逊相关系数为0.996,说明两个变量之间高度线性相关。从6图中可以了解到,两个变量之间呈现高度的线性相关性,线性回归方程y=1.003x +0.06。说明仪器悬垂系数和Kinect悬垂系数具有高度一致性。将波纹数、最大峰高、最小峰高、峰高不匀率、最大夹角、最小夹角、夹角不匀率分别作回归分析,得到的结论是:由仪器测得的悬垂性能指标与由Kinect测得的悬垂性能指标具有高度的一致性,提示由Kinect传感器构成的三维扫描仪检测织物的悬垂性能具备可行性。
4 结 论
由Kinect传感器组成的织物三维悬垂性测量装置,测量数据经扫描、编程和图像处理后得到的悬垂性能指标,与YG811悬垂性能测试仪测得悬垂性能指标进行比较,两种悬垂性能指标高度一致,表明此方法具备可行性。传统伞式悬垂性能指标根据试样二维投影平面阴影差的比值得到,需要在特定的仪器(YG811)进行测试或人工计算得到,不能得到直观的三维形态图像。由Kinect传感器构成的三维扫描仪直接能直观地获取试样的三维悬垂投影,经过编程和图像处理提取试样投影轮廓曲线,得到悬垂性能指标。相比于传统悬垂性能测试法,由Kinect传感器构成的三维扫描仪不但能够准确地获取传统的悬垂性能指标,更能直观地反映织物三维悬垂形态图像,为进一步的三维悬垂性能分析提供新的测试手段。
[1]王玉清,纪 峰.织物悬垂性能理论研究综述[J].山东纺织科技,2004,29(5):50-52.
[2]徐 军,姚 穆.静态伞式悬垂实验参数的研究[J].纺织学报,1988,19(3):43-44.
[3]陈 明,周 华,杨兰君,等.织物三维悬垂形态测试指标与三维重建[J],纺织学报,2008,29(9):51-55.
[4]李 强,过玉清.基于Labview织物悬垂性测试及三维重建系统[J].仪器仪表与分析监测,2007(1):15-17.
[5]GB/T 23329-2009纺织品:织物悬垂性试验方法[S].
[6]Newcombe R A,Izadi S,Hilliges O,et al.Real-time dense surface mapping and tracking[J].Mixed and Augmented Reality(ISMAR),2011(38):127-136.
[7]Izadi S,Kim D,Hilliges O,et al.Kinectfusion:realtime 3D reconstruction and interaction using a moving depth camera[J].Mixed and Augmented Reality(ISMAR),2011(38).559-568.
Fabric Drape Measurement Method Based on Kinect Sensor
SHEN Wei,REN Jing,ZHOU Hua,SUN Xi-chao
(School of Materials and Textiles,Zhejiang Sci-Tech University,Hangzhou 310018,China)
Most fabric drape measurement methods are confined to be two-dimensional,and can't reflect intuitively 3D shape of fabric.This paper proposes a new measurement method which could obtain 3D shape of fabric by scanning directly.This method obtains depth images of multiple locations of the specimen with Kinect sensor,establishes 3D scenes,processes with C++programming and image processing software,and extracts drape indicator of the specimen.This indicator is highly consistent with that obtained by traditional measurement method,verifying that the measurement method of obtaining drape indicator of specimen by scanning with Kinect sensor is feasible.
fabric drape;3D drape;Kinect sensor;measurement method
TS101.923.1
A
(责任编辑:张祖尧)
1673-3851(2014)03-0306-04
2013-09-28
沈 伟(1988-),男,浙江嘉兴人,硕士研究生,主要从事纺织计算机应用的研究。
周 华,电子邮箱:hzzh@zstu.edu.cn
猜你喜欢
石油沥青(2021年1期)2021-04-13 01:31:08
中学生数理化·七年级数学人教版(2020年12期)2021-01-18 06:57:42
语数外学习·高中版上旬(2020年8期)2020-09-10 07:22:44
水利规划与设计(2020年1期)2020-05-25 08:01:28
西南石油大学学报(自然科学版)(2018年4期)2018-08-02 05:42:38
制冷技术(2016年4期)2016-08-21 12:40:30
中国医药指南(2016年1期)2016-07-11 11:57:51
广西电力(2016年5期)2016-07-10 09:16:44
测绘科学与工程(2016年4期)2016-04-17 06:51:14
Transactions of Nanjing University of Aeronautics and Astronautics(2015年2期)2015-11-24 02:39:22