水下潜器的航路规划技术综述
2014-05-24 16:22王奎民海军驻锦州地区军代表室辽宁锦州121000
智能系统学报 2014年6期
王奎民(海军驻锦州地区军代表室,辽宁锦州121000)
水下潜器的航路规划技术综述
王奎民
(海军驻锦州地区军代表室,辽宁锦州121000)
通过对水下潜器航路规划技术的研究和分析,概括阐述了当前水下潜器的主要航路规划技术,进而归纳总结出各种主要航路规划技术控制方法的优缺点。同时,指出主要考虑单一简化的海洋环境因素及单一简化因素的不足,并分析了实际情况下需要增加的各海洋因素。通过比较各种方法的优缺点以及结合真实复杂海洋环境因素,利用多约束条件方法,提出基于真实复杂海洋环境因素下航路规划技术的优化方法以及各海洋环境因素对水下潜器航路规划准确性及安全性的影响。进而结合有限多约束海洋因素条件分析了该环境下航路规划的可行性,并在对复杂海洋环境建模的基础上进行仿真验证。最后,对水下潜器的航路规划技术的困难及未来的发展进行了讨论和展望。
水下潜器;航路规划;环境建模;多条件约束;A∗算法;航路优化;
水下潜器是一种航行于水下的航行器,包括载人水下航行器和无人水下潜器,能够完成水下勘探、救援、侦查、军事打击等多种任务。在海洋开发日益重要的今天,水下潜器越来越受到各个国家的重视,无论在民用还是军事领域都扮演着重要的角色。
航路规划是保障其航行安全必不可少的重要功能。航迹规划是综合考虑地形、威胁、任务需求和潜器性能等多种因素,找到从起始点到目标点的最优航迹,并要求生存概率最大和航行时间最短[1⁃2]。航路规划是水下潜器任务规划的重要组成部分之一。早期的航路规划主要是依靠人工完成,需要规划人员根据水下潜器的任务,依据海图、海洋环境历史统计数据等信息进行综合评估,规划出最终航路。近些年来,随着计算机技术、软硬件技术、最优化技术的发展,智能自主航路规划越来越被人们关注,并已发展成为一个新兴热点研究方向。
1 航路规划技术研究现状
航路规划技术是一个综合性很强、难度很大的研究课题。其涉及的专业和方向很多,主要包括以下几个关键技术。
1.1 环境信息的获取及处理
水下环境的复杂性对水下潜器的工作产生很大的影响,所以为了水下潜器的工作和安全,或许周边环境信息具有重要意义。通过自身携带的各种传感器设备获得相应的信息,并通过自身携带的计算机实时的处理和修正。
1.2 环境模型的建立
环境模型从某种意义上说是航路规划的基础,合理的环境表示才能有利于规划中搜索量的减少,才能有利于时空开销的减少,环境建模的方法直接影响航路规划的效率及准确性。
常用环境几何模型有概率路图、可视图、快速扩展随机树、Voronoi图、栅格地图、细胞分解等[3]。
环境建模是一切对潜器的运动造成影响的因素的数学模型化过程。与真实环境相比,航路规划时应综合考虑海流、海浪、温度、盐都、海水密度、海底地形等影响潜器机动性能的因素。出于对其隐蔽性和安全性的考虑,其航路规划还需要考虑海水透光性、声道及声速跃层等因素。对于影响机动性的因素,可以通过增加对潜器数学模型的各方面的干扰来模拟。对影响潜器的隐蔽性和安全性的因素,可以通过对该区域的航行安全做安全评估,以此来规划最优路径。无论哪种因素,都可以概括成一个方面的约束条件。
1.3 航路规划算法
航路规划算法主要可以归纳为4类,如图1。
1)基于几何模型搜索的方法。
这类算法的原理主要分为2个步骤,首先构建包含障碍物的环境几何模型,然后选择某种合适的搜索算法,按照一定的最优策略进行搜索得到可行解。如果得到的航路解不光滑,还可以继续对非光滑的航路作进一步处理,以满足潜器的运动学和动力学要求。常用的环境几何模型有概率路图、可视图、快速扩展随机树、Voronoi图、栅格地图、细胞分解等,常用的搜索算法主要有A∗搜索算法、基于概率采样的搜索方法、Dijkstra搜索算法等[4]。
2)基于虚拟势场和导航函数的方法。
构造各种虚拟势场和导航函数是另一种应用广泛的航路规划方法。比较主要的方法有人工势场法和谐波函数势场法[5⁃6]。人工势场法是二维航路规划应用最广泛的方法之一,其最大的特点是算法简单,执行效率相当高。谐波函数势场法可较好地解决二维航路规划问题,之后又被推广到三维空间,但其主要问题是求得的航路不是最优解,并且计算复杂度太高,很难实际应用于三维环境中。
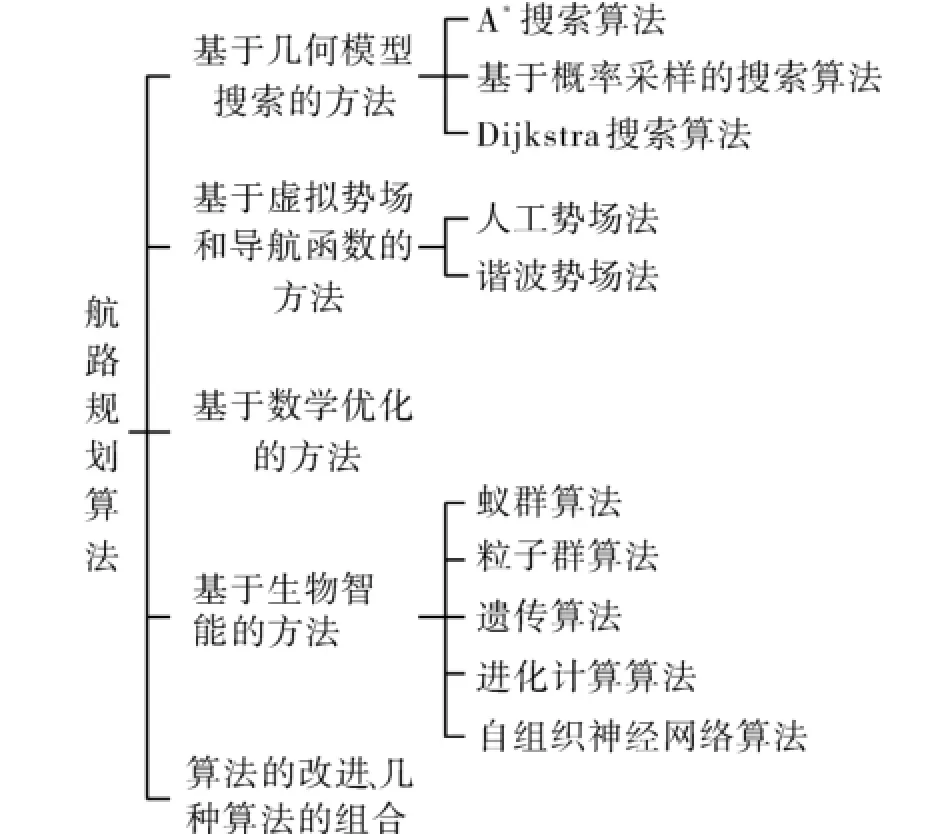
图1 常见航路规划算法Fig.1 The common path p lanning algorithm s
3)基于数学优化的方法。
基于数学优化的航路规划方法是一种在数学上完备的最优化方法。Shingh等[7]将航路规划中的各种约束转化为线性多项式约束或非线性多项式约束,然后用线性规划或非线性规划求解。与此相似的还有混合整数规划方法,该方法将空间障碍物全部近似成各条边与笛卡儿坐标轴平行或垂直的长方体。若将三维空间用Delaunay三角剖分,航路规划问题的各种约束可转化成一系列的线性矩阵不等式,通过求解线性矩阵不等式优化问题得到一条由各三角形连线构成的最优轨迹。
4)基于生物智能的方法。
基于生物智能的航路规划方法不必建立复杂的环境模型,通常都提出各种强有力的搜索算法,在稳定收敛的同时,在自由空间进行随机搜索,目前应用较多的主要有蚁群算法、粒子群算法、遗传算法、进化计算、自组织神经网络等[8⁃9]。这类算法的突出优点是可以方便的处理复杂问题模型和约束条件,并且其求解结果为全局最优。
对比上述4类方法的航路规划性能,可得出如表1所示的结果。
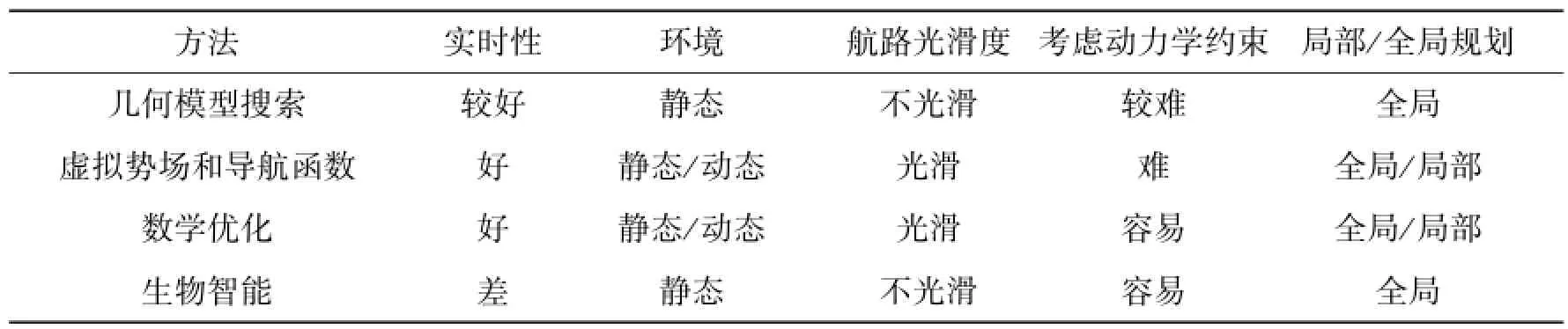
表1 航路规划方法性能比较Table 1 Comparison of path p lanningmethods
由表1可以看出,基于几何模型搜索的方法,在构建环境障碍物信息上具有简单方便的优势,可运用各种成熟的图搜索算法求取最优解,适用于静态环境和离线规划。基于虚拟势场与导航函数的方法的最大优点是实时性好,而且可得到非常光滑的航路,因此优先在局部规划器中选用这种方法。基于数学优化的方法在解决动力学约束问题时占优势,可综合考虑航路的安全性、可靠性和优化性能。基于生物智能的方法可以解决异常复杂的非结构化约束和各种难以近似处理的动力学约束等难题。但是最大不足是规划周期太长,很难在可容忍的控制周期内处理完毕,因此不宜在规划过程中频繁调用,只能应用于调用周期较大的情形或全局的初始规划。综上所述,上述4类方法各有优缺点。在实际应用中,需要根据水下潜器的应用场合、规划航路要求和潜器自身机动性能,寻找一种合适的航路规划方法。
2 复杂海洋环境下航路规划技术
就水下潜器而言,海洋环境是指影响水下潜器及其设备的整体技术、战术性能的海洋气象、海洋水文和海洋地质等方面的自然条件,其直接影响潜器航行的安全性、隐蔽性以及战术行动的作战效能。水下潜器在执行各种任务时,首先必须保证潜器平台的航行安全,而与潜器的安全性相关的外界因素,除了潜器自身质量之外,最重要的就是潜器航行所处的海洋环境场的安全性。适宜的海洋环境不但能够保证水下潜器顺利完成任务,还能为潜器航行提供掩护,提高航路的隐蔽性,甚至能提高水下潜器的航行效率,增大潜器的生存机率[10]。
在复杂环境下,航路规划是一个复杂的多约束问题,海洋环境的温度、密度、海流、海浪等对航行器的机动性和安全性造成了很大的影响。所以忽略内部和外部的约束条件前提或者单纯得强调目标搜索的航路规划方法在实际应用中是不可行的。
如图2所示,考虑海洋环境对水下潜器自身运动特性的影响,通过环境感知传感器获取海洋环境信息,同时实时制定及其修正航路规划。
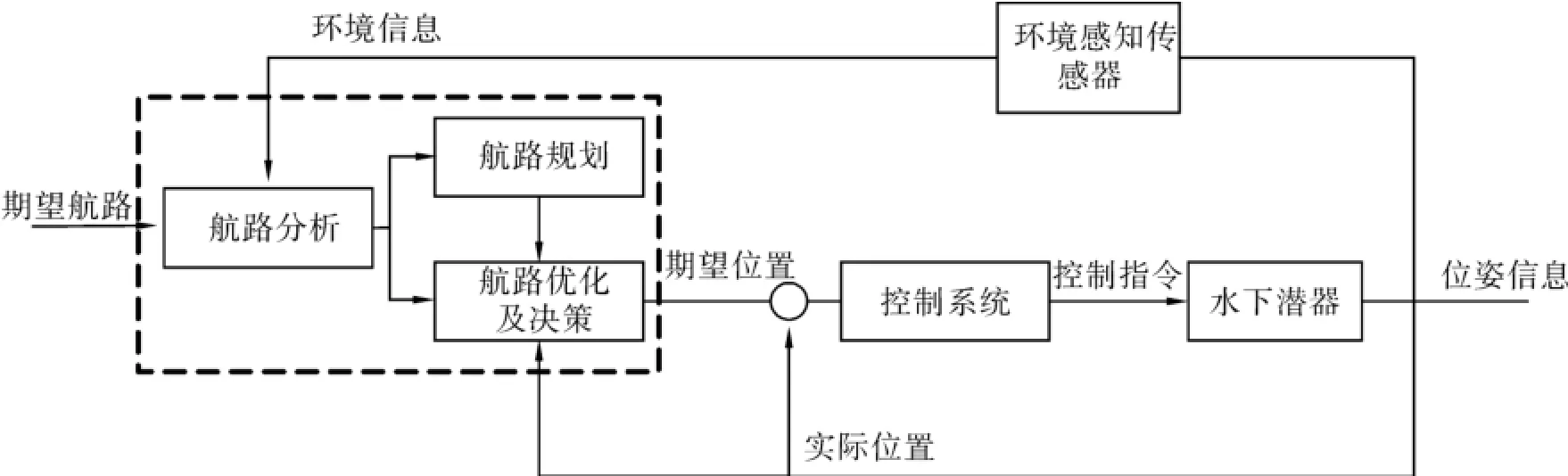
图2 水下潜器航路规划系统结构Fig.2 The system construction of path p lanning for underwater vehicles
结合考虑水下潜器自身因素及海洋环境等多方面的因素,构建一个基于多约束条件下的水下潜器航路最优规划方法。主要可以分成2个部分:目标函数及约束条件和航路的优化及决策。根据不同的规划任务,其目标函数通常不相同,目前较为普遍的是通过多个优化目标的加权和,以权重的方式协调各种优化目标之间的相对比重来构造自己所需要的目标函数。在此基础上,为了能给水下潜器的航路规划提供准确环境条件,充分地把海洋环境的各种因素构造成约束条件。
在现阶段的水下潜器航路规划算法中,通常只考虑了地形信息和敌方反潜探测对潜器航行的威胁,很少考虑在潜器航行过程中海洋环境因素的影响,导致规划出来的航路可实施性太低,成为水下潜器智能自主航路规划一直无法真正应用的原因之一。因此,如何将海洋环境要素应用到水下潜器航路规划中,是现阶段水下潜器航路规划技术面临的主要难题。表2给出了影响水下潜器航行的海洋环境要素。
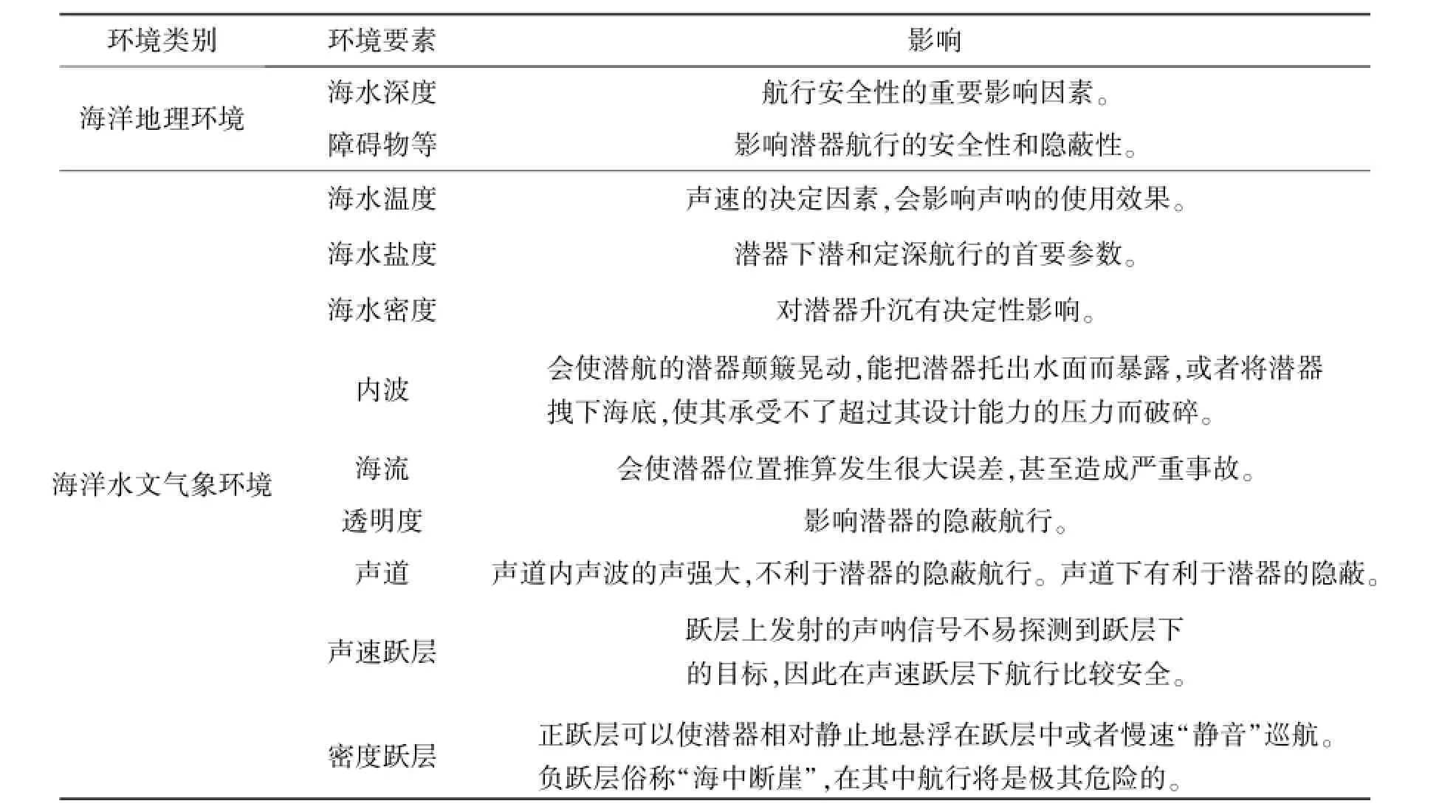
表2 影响水下潜器航行的海洋环境要素Table 2 The ocean factors effecting underwater vehicle
近年来,人们逐渐认识到海洋环境要素在航路规划中的重要性,提出了一系列考虑海洋环境要素的航路规划方法。在众多的海洋环境要素中,海流是被考虑较多的要素。徐玉如等[11]将海流因素作为遗传算法的评价因子,在航路规划的层面上考虑海流的影响。毛宇峰等[12]设计了综合航路长度、海流和转向费用的适应度函数很大程度减小了海流对水下机器人能量消耗和控制的不利影响。高博等[13]提出了一种利用B样条曲面对动态海流环境进行建模的方法使航行器能够在航路的搜索过程中,综合考虑全局航路消耗和能量消耗,寻找能够实现目标函数最优的航路。但是上述几篇论文在航路规划中采用的海流均是由流函数生成的。利用这种海流数据进行航路规划虽然在一定程度上考虑了海流的影响,但是由于这种海流与实际海流存在较大的差距,因此生成的航路与实际航线偏差较大。Al⁃varez等[14]提出了一种多变海流影响下的三维航路规划方法。该方法把搜索空间划分成粗糙的网格,然后搜索出可能航路的大致空间范围。在海流的处理上把三维海流简化为流速较小、局部方向基本不变的二维的海流。Garau等[15]提出了一种考虑海流信息的基于A∗的航路规划算法,该算法假设海流为二维固定量,航路限制为网格形式的,并且只能沿坐标轴或者45°角移动,从而大大降低了对海流的利用。Petres等提出了一种连续的的AUV航路规划算法,该算法利用各向异性的快速匹配算法进行航路规划。该方法的最大局限性是只能使用线性的能量评价函数。另外,没有考虑可以导致不可航航路的大海流,且考虑海流的最大能量节省量只能达到10%[16]。朱黎[10]将海洋环境因素作为约束条件引入了潜器的航路规划算法中,主要考虑了“海底断崖”、“液体海底”、海流等海洋要素的影响,但是对海洋环境要素的处理还相对比较简单。
水下潜器在海洋中航行会遇到各种各样海洋环境因素的影响,不同的海洋环境因素对潜器航行的影响是不同的,因此对航路规划的影响也不尽相同。海洋环境要素与一般规划问题中的障碍约束有很大的区别,它是一种不规则的、区域性的、影响模糊的环境场信息,并且不同的要素具有不同的物理分布特性。因此,如何根据海洋环境要素的特点及其对水下潜器航行的影响进行分类建模,并引入到潜器的航路规划中是一个需要解决的难题。
本文提出的基于多约束海洋环境条件的潜器航路规划方法是将海流、内波、跃层、密度、温度等一系列因素以一定的威胁度值,通过任务加权估计,进行针对该任务的加权计算,在不同的任务中,权值不同,海洋环境因素的威胁度也不同。在相应的任务中,通过这种多约束海洋环境条件下的航路规划方法将潜器的航路限制在一个满足任务要求的安全标准之上,潜器按威胁度顺序避开相应的海洋环境因素,大大提高了潜器的安全性和稳定性。
3 仿真验证
本节利用某型号水下潜器的水动力模型,在某种设定的水文环境下,对航路规划的准确性和安全性进行仿真验证。其中,除通常考虑的海流及海浪干扰等条件约束外,还考虑到海水的温度、密度、盐度以及海底地形造成的海水不规则流动等,因为实际海况的这些条件的无序性,所以在仿真中,通过添加水平方向和垂直方向随机干扰。
图3证明了在复杂海洋环境下,通过多约束方法可以实现水下潜器的三维航路规划。图5考虑了在导航信息不够精确、通过传感器结合地形等已知环境因素实现航路的最优化选择,同样,该方法也是结合了多约束条件的方法,综合考虑了海洋环境的约束条件以及潜器自身的约束条件。最终规划处在多个约束条件下的最优航路。
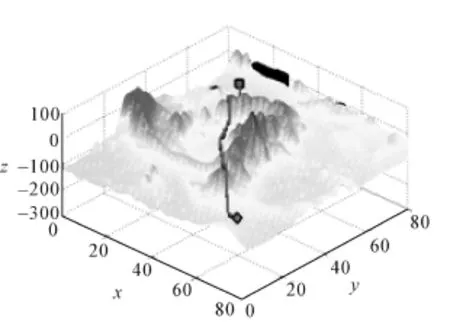
图3 复杂环境下的三维航路规划Fig.3 3⁃D path planning under com plex environment
图4 是没有参考已知环境下的多约束航路规划路径,其中,椭圆形的表示可用路径。因为缺少不利环境因素的限制约束,造成潜器在规划路线时对航路的规划范围较宽,排除的威胁航路少,对潜器的安全造成一定的影响。
图5是通过传感器测出已知信息修正后的航路规划路径。在多方面的约束下航路得到了最大程度的限制,剔除影响安全的航路,潜器的规划路径得到了最大的优化。
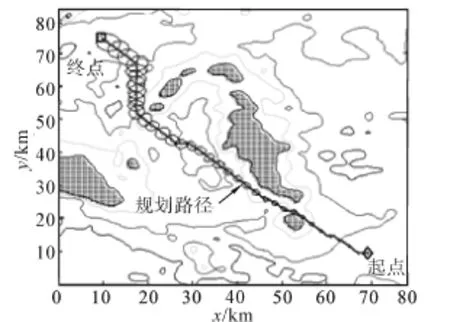
图4 基于多约束的可行规划路径Fig.4 Path p lanning based on m ultip le⁃constrain ts
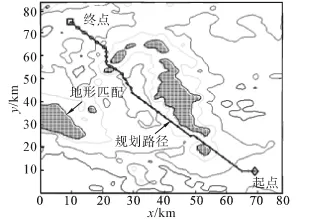
图5 基于多约束的优化航路规划Fig.5 The optim ized path p lanning based on multip le⁃constraints
4 面临的问题及发展方向
由于航行环境的特殊性,水下潜器在航行的过程中要同时面对来自自然环境和敌方的多重威胁,导致了水下潜器智能自主航路规划十分困难,目前主要面临如下问题需要进一步研究:
1)海洋环境要素处理与航行空间建模。
为了追求算法的高效性,目前的航路规划方法大多建立在规则的理想障碍物假设上,对环境过分简化,没有充分考虑影响潜器安全隐蔽航行的海洋环境要素。如果将影响潜器航行的环境要素进行归纳分类并抽象转化为可以利用的环境模型,必将大大提高规划航路的实用性。
2)高效实用的三维航路规划算法研究。
在水下潜器航路规划问题中,规划算法的好坏直接决定着航路规划的成败。目前可用于三维航路规划的算法都存在一些不足。如势场法容易陷入局部最小,A∗算法的时空要求较高,人工智能算法运算量大、规划速度慢等。因此,如果能够结合水下潜器航路规划的特点,提出一种高效实用的三维航路规划算法,必将大大推动水下潜器航路规划技术的发展。
3)多约束航路性能综合评价模型构建。
为了保证水下潜器的安全、隐蔽、快速航行,潜器的航路规划需综合考虑多种性能指标,如安全性和隐蔽性最好、能量消耗最小、航路长度最短和体现决策者意图最大等。这些性能指标中有些指标之间相互矛盾,如何在这些相互冲突的多个性能指标之间进行协调权衡是一个重要的多目标优化问题。另外,三维空间航路规划必须考虑潜器运动的约束问题,比如潜器的最小转弯半径、最大升沉角度、最大下潜深度等。因此,综合考虑潜器航行过程中的约束条件,研究基于海洋环境信息的潜器航路评价方法,构建潜器航路综合评价模型具有重要的意义。
[1]严浙平,赵玉飞,陈涛.多约束条件下UUV空间航迹规划[J].鱼雷技术,2011,19(5):365⁃369.YAN Zheping,ZHAO Yufei,CHEN Tao.3D path planning for UUV with multi⁃constrains[J].Torpedo Technology,2011,19(5):365⁃369.
[2]陈涛.威胁条件下AUV自主决策与规划研究[D].哈尔滨:哈尔滨工程大学,2010:25⁃30.CHEN Tao.Research on decision⁃making and planning of AUV in threat condition[D].Harbin:Harbin Engineering University,2010:25⁃30.
[3]曲镜圆.基于声呐的AUV环境感知与地形建模方法研究[D].哈尔滨:哈尔滨工程大学,2009:16⁃20.QU Jingyuan.Research on environment perception and ter⁃rain modeling for AUV based on sonar[D].Harbin,China:Harbin Engineering University,2009:16⁃20.
[4]HWANG JY,KIM JS,LIM SS,et al.A fast path planning by path graph optimization[J].IEEE Transactions on Systems,Man,and Cybernetics:Part A,2003,33(1):121⁃128.
[5]LIU C,WEIZ,LIU C.A new algorithm formobile robotob⁃stacle avoidance based on hydrodynamics[C]//IEEE Inter⁃national Conference on Automation and Logistics.Piscat⁃away,USA,2007:2310⁃2313.
[6]FAHIMIF,NATARAJC,ASHRAFIUON H.Real⁃time ob⁃stacle avoidance for multiple mobile robots[J].Robotica,2009,27(2):189⁃198.
[7]SINGH R,BUSSA N.Path planning using Shiand Karl level sets[C]//Proceedings of the1st International Conference on Robot Communication and Coordination.Piscataway,USA,2007:2829⁃2832.
[8]张京娟.基于遗传算法的水下潜器自主导航规划技术研究[D].哈尔滨:哈尔滨工程大学,2003:29⁃35. ZHANG Jingjuan.Research on autonomous navigation plan⁃ning based on genetic algorithm[D].Harbin:Harbin Engi⁃neering University,2003:29⁃35.
[9]刘利强.蚁群优化方法研究及其在潜艇导航规划中的应用[D].哈尔滨:哈尔滨工程大学,2007:35⁃40.LIU Liqiang.Ant colony optimization methods and its appli⁃cation in navigation planning for submaring[D].Harbin,China:Harbin Engineering University,2007:35⁃40.
[10]朱黎.基于改进蚁群算法的潜艇航路规划技术研究[D].长沙:国防科学技术大学,2009:75⁃80.ZHU Li.Research of submarine route planning based on improved ant colony algorithm[D].Changsha,China:Na⁃tional University of Defense Technology,2009:75⁃80.
[11]徐玉如,姚耀中.考虑海流影响的水下机器人全局路径规划研究[J].中国造船,2008,49(4):110⁃114.XU Yuru,YAO Yaozhong.Research on AUV global path planning considering ocean current[J].Shipbuilding of China,2008,49(4):110⁃114.
[12]毛宇峰,庞永杰.改进粒子群在水下机器人路径规划中的应用[J].计算机工程,2010,30(3):789⁃792.MAO Yufeng,PANG Yongjie.Application of improved par⁃ticle swarm optimization in path planning of underwater ve⁃hicles[J].Journal of Computer Application,2010,30(3):789⁃792.
[13]高博,徐德民,张福斌,等.海流建模及其在路径规划中的应用[J].系统仿真学报,2010,22(4):975⁃961.GAO Bo,XU Demin,ZHANG Fubin,et al.Method of de⁃signing optimal smooth way for vehicle[J].Journal of Sys⁃tem Simulation,2010,22(4):975⁃961.
[14]ALBERTO A,ANDREA C,REINERO.Evolutionary path planning for autonomous underwater vehicles in a variable ocean[J].IEEE Journal of Oceanic Engineering,2004,29(2):418⁃429.
[15]GARAU B,ALVAREZ A,OLIVER G.Path planning of autonomous underwater vehicles in current fieldswith com⁃plex spatial variability:an A∗approach[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation.Barcelona,Spain,2005:194⁃198.
[16]PETRESC,PAILHASY,PATRON P,et al.Path plan⁃ning for autonomous underwater vehicles[J].IEEE Trans⁃actions on Robotics,2007,23(2):331⁃341.
The analysis on path p lanning for underwater vehicle
WANG Kuimin
(Navy Military Representative Office in Jinzhou,Jinzhou 121000,China)
The existing path planning methods of underwater vehicles are analyzed,and then the advantages and limitations of themethods are summarized.Due to the problem that ocean environmental factors are oversimplified in current path planning,the importance and influence of the ocean environmental factors are discussed.To adapt to the real ocean environment,the path planning based onmulti-constraintocean conditions is proposed.The simula⁃tion show stability and safety of underwater vehicle sailing can be improved by the proposed method.At last,the technology development trends of the underwater vehicle path planning are given.
underwater vehicle;path planning;environmentmodeling;multi⁃constrains;A∗algorithm;rout opti⁃mization;local planning;global planning
TP18;U674.941;TJ630
A
1673⁃4785(2014)06⁃0653⁃06

王奎民.水下潜器的航路规划技术综述[J].智能系统学报,2014,9(6):653⁃658.
英文引用格式:WANG Kuim in.The analysis on path p lanning for underwater vehicle[J].CAAI Transactions on Intelligent Sys⁃tems,2014,9(6):653⁃658.
10.3969/j.issn.1673⁃4785.201408017
http://www.cnki.net/kcms/doi/10.3969/j.issn.1673⁃4785.201408017.htm l
2014⁃08⁃16.
日期:2014⁃11⁃20.
国家自然科学基金资助项目(51179038).
王奎民.E⁃mail:wangkuimin2014@163.com.
王奎民,男,1971年生,博士,高级工程师,主要研究方向为水下航行器的控制与仿真。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
电机与控制应用(2022年4期)2022-06-27
中国海洋大学学报(自然科学版)(2020年8期)2020-08-03
火力与指挥控制(2020年2期)2020-04-02
中国海洋大学学报(自然科学版)(2020年8期)2020-01-07
百科探秘·海底世界(2017年9期)2018-01-22
海军航空大学学报(2015年3期)2015-11-11
中学历史教学(2015年11期)2015-11-11
中国民航大学学报(2015年3期)2015-03-01
自然资源遥感(2014年2期)2014-02-27