基于Solid Works的厨用清洗机的创新设计与分析*
2014-05-07 12:49陈洪振朱永伟
机械工程与自动化 2014年3期
邵 健,周 欢,陈洪振,朱永伟
(扬州大学 机械工程学院,江苏 扬州 225127)
0 引言
目前市场上销售的清洗机运用的技术主要有一般喷淋方式、循环水流夹带气泡使物体表面与杂质分离的方式、紫外线(UV)技术、加入臭氧的方式、利用涡流喷淋专利清洗方式、超声波技术、利用高活性生态氧的迅速溶解技术等。随着时代的进步,越来越多的创新技术在清洗机上得到了应用。本设计中的清洗机采用机械振荡的方式来清洗物体表面,采用不完全齿轮通过间歇式啮合的方式让清洗桶按照一定频率振荡从而产生水流冲击,通过水流产生的冲击力去除吸附在清洗物表面的杂质。
1 清洗机电路和整体运动机构设计
1.1 清洗机电路设计方案的拟定
清洗机基本电路如图1所示。电路中基本的操作可分为以下几部分:
(1)电源回路:插头K→电源开关P→触点A2→电阻→零线。
(2)清洗机进水回路:插头K→电源开关P→触点A1→水位开关触点COM→触点NC→进水电磁阀ZF→零线。当清洗桶内的水位达到预定位置时,水位选择检测器的储气室中的空气压力逐渐升高,当达到额定压力时水位开关触点COM由NC转向NO,进水电磁阀ZF断电,达到预定水位。
(3)清洗机清洗和排水回路:插头K→电源开关P→触点A1→水位开关触点COM→触点NC→进水电磁阀ZF→达预定水位触点COM→触点NO→安全开关S→触点C1→调速电机BD开始运转,进入清洗模式→定时器控制时间(清洗结束)→达到清洗预设时间后蜂鸣器BZ响,清洗结束。排水时,触点C转向触点C2,排水电磁阀PF打开,同时顶杆电磁阀DF开始动作,为单向阀打开并顺利排水做好准备工作,开始排水,废水经由预先设计好的排水管道排出。

图1 清洗机基本电路
1.2 总体传动机构工作
图2为清洗机传动机构简图,其动力输出传递的顺序为:电机→离合器→电机联轴→小带轮→大带轮→小齿轮→大齿轮→不完全齿轮→清洗桶齿轮→清洗桶支承轴,最后实现桶的往复式摆动。齿轮传动部分局部放大后如图3所示,齿轮Ⅰ和Ⅱ为同步齿轮,同步齿轮的角速度大小相等,方向相反。齿轮Ⅰ和Ⅱ相互啮合时,同轴的不完全齿轮Ⅰ和Ⅱ与清洗桶齿轮分别啮合,当左边的不完全齿轮Ⅰ与清洗桶齿轮啮合时,右边的不完全齿轮Ⅱ与清洗桶齿轮不啮合,桶向右摆动;同理,当不完全齿轮Ⅱ与清洗桶齿轮进入啮合而与不完全齿轮Ⅰ脱离啮合时,桶向左摆动,并且不完全齿轮实际上只在180°范围内有齿,这样就使清洗桶能够均匀地摆动起来。
1.3 电磁阀选择与水流特性
进水、排水电磁阀均采用常闭型(通电开启阀门),公称直径为Φ10 mm;形态为隔膜式;公称压力为0.1 MPa~2.5 MPa;类型为直动式电磁阀;连接形式为螺纹联接;流量特性为8 L/min(流量可控制在0.25 L/min~8 L/min)。清洗桶在摇摆的过程中是不稳定的,桶上不能设置电子元件。在清洗桶下部安装单向阀,清洗机底板上设置一个容水箱,容水箱与排水电磁阀通过管道连接,使水流通过排水电磁阀管道排出箱体,从而形成一个完整的排水系统。水流运动为比较复杂的非恒定流动情况,液体自由面下降的速度很小,存在一条流线,如图4所示,流线一端在水面上A点,另一端在孔口B点,流线的具体位置不易确定。对A,B两点应用流体伯努利方程:

其中:pA,pB,vA,vB分别为A,B 点压强和流速;zA,zB为以B为参考点时,A,B两点到参考点的竖直距离;ρ为水流密度;g为重力加速度。

图2 清洗机传动机构简图

图3 齿轮传动示意图

图4 恒定和非恒定流动
出水口流量公式:

其中:qB为出水口的水流流量;AB为出水口横截面面积。注满水箱的时间t为:

其中:V容水箱为容水箱容积,取为1.44×10-3m3。将vA=0,pA=pB=pa(大气压损),zA-zB=h,AB=π·(0.005)2m2代入式(1)得vB≈1.71 m/s,由式(2)得qB=1.34×10-4m3/s。将式(1)、式(2)结果代入式(3),则注满容水箱的时间t≈10.7 s。
1.4 清洗桶设计与分析
清洗桶应具有耐酸碱、耐冲击、耐热等性能,且应具有较高的强度。常见的清洗桶材料有搪瓷、铝合金、不锈钢、改性聚丙烯等,本设计采用不锈钢。通过ANSYS分析软件可以看到在加载额定频率的情况下清洗桶的应力和变形情况。在清洗桶轴处施加大小为5 000 N·mm的转矩作用,在轴两端施加允许Y方向转动的约束,由于谐响应分析是用于确定线性结构在承受一个或多个随时间按正弦规律变化的载荷时稳态响应的一种技术,因此可通过谐响应分析得到清洗桶在振荡频率为4 Hz时的结果,如图5、图6所示。
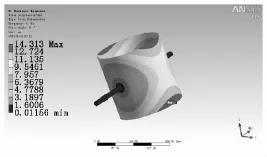
图5 清洗桶的变形

图6 清洗桶的应力情况
图5中整个清洗桶在受到转矩的作用下总变形最大为14.313 mm,位于桶壁的下边缘;最小为0.012 mm,位于整根支承轴上。图6中清洗桶最大应力为0.010 98 MPa,位于支承轴与清洗桶连接的内壁上。结果显示采用机械式振荡时桶的变形量是比较大的,因此采用刚度较大的材料,在适当增加桶壁厚度的同时增加支承轴的刚度有利于发挥清洗机整体的清洗效果。
1.5 夹紧机构与顶杆机构、单向阀的设计
图7为单向阀、顶杆、制动杆示意图。工作前,顶杆与清洗桶底部电磁阀活塞底部位置的距离为20 mm,顶杆做向上运动时,两制动杆互相靠拢,圆弧状刹车块逐渐夹持半圆形凸台。刹车块材质为橡胶,利用物体之间的摩擦力使清洗桶减速。随着制动杆逐渐夹紧,使清洗桶的重心落在垂直于地板的中心线上;同时顶杆将单向阀下部活塞顶开使单向阀导通,本应与阀体内壁紧密接触的阀芯侧壁向上移动,使处于清洗桶内的水流经阀芯内部的小孔由侧面间隙流入下部的管道内,通过预先设计好的容水箱经排水电磁阀排出。清洗结束后,由于电磁阀本身的复位功能,顶杆恢复到原位置,同时带动两制动杆做松开动作,制动杆下部连接导轨方便滑动。

图7 单向阀、顶杆、制动杆示意图
2 超声波清洗的使用试验
超声波清洗(见图8)就是通过换能器将超声波发生器的电振荡转化为机械振荡,再通过变幅杆的振幅扩大原理使得与变幅杆连接的工具头做高频振动对物品进行清洗。清洗后的效果如图8(c)所示,螺丝钉表面的铁锈被完全去除掉,这是利用超声频振动对单纯水溶液的冲击、涡流、空化效应,使生锈的螺丝钉表面受到多种作用,表面锈蚀层数秒钟得以去除。

图8 超声清洗
通过在清洗桶内部设置一个超声振动部件,使得由齿轮对产生的小幅摆动与超声高幅振动的相互作用充分发挥,则水流清洗效果会更加理想。
3 结论与展望
(1)采用激荡式洗涤是一种有效的方法,但是清洗桶的振幅不宜过大,水的容量也不宜过多。
(2)用带传动和齿轮传动组合的多级传动有效地提高了洗涤效率,但是在传导运动中会产生刚性冲击,因此必须保持各传动件的润滑效果良好。
[1] 马盛明.机械创新设计教育[J].机械设计与研究,1999(2):79-80.
[2] 高英武,刘毅君,任述光,等.振动喷淋式蔬菜清洗机的研究[J].农业工程学报,2000,16(6):92-95.
[3] 杨红兵,丁为民,陈坤杰,等.新型蔬菜清洗机的研制[J].农业工程学报,2006,21(1):92-96.
[4] 庞斌.超声波臭氧组合清洗技术试验研究与样机研制[D].杨凌:西北农林科技大学,2010:2-46.
[5] 关玉明,张文雅,肖艳春,等.间歇机构——不完全齿轮机构设计及应用[J].机械设计与制造,2009(7):59-63.
猜你喜欢
火箭推进(2022年5期)2022-10-19
中国特种设备安全(2021年5期)2021-11-06
模具技术(2021年5期)2021-10-13
中国药理学通报(2021年7期)2021-07-09
锻造与冲压(2020年13期)2020-07-09
铁道通信信号(2019年3期)2019-04-25
电子制作(2017年17期)2017-12-18
工业设计(2016年6期)2016-04-17
设备管理与维修(2016年6期)2016-03-16
船海工程(2015年4期)2016-01-05