固液混合动力火箭地面发射系统时序设计①
2014-05-03 08:29蔡国飙齐霄强
固体火箭技术 2014年2期
宋 佳,王 伦,蔡国飙,齐霄强
(1.北京航空航天大学宇航学院,北京 100191;2.北京机电工程研究所,北京 100074)
0 引言
固液混合动力探空火箭是一种新型的、采用固液混合火箭发动机作为动力装置的、具有推力可调、可重复启动等特点的飞行器[1]。自苏联1933年设计并成功发射世界上第一个应用固液混合火箭发动机的飞行器“GRID-9”探空火箭以来,世界范围内发射固液混合动力探空火箭20余次,探空火箭已经成为固液混合火箭发动机应用最多的飞行器,其主要的飞行目的是验证固液混合火箭发动机的实际飞行性能、验证飞行器各系统的实际飞行性能[2],为低成本、安全性好、稳定性高的固液动力飞行器的研制积累经验。2004年6月21日,世界上首次由私人投资建造的准载人航天器“太空船一号”的成功发射,向全世界证明了混合动力的发展潜力,在全世界范围内重新掀起了研究热潮[3-4]。2008年12月 5日,北京航空航天大学成功发射国内第1枚固液探空火箭“北航2号”,于2012年4月25日再次成功发射了固液探空火箭“北航3号”,并实现飞行过程中变推力[5]。
固液混合火箭发动机是采用液体氧化剂和固体燃料的混合火箭发动机,主要由液体氧化剂供给系统和发动机主体系统组成。其工作原理是采用挤压式氧化剂供给系统,触发点火器后打开液路阀门释放液体氧化剂,氧化剂在燃烧室中与固体燃料接触并燃烧,发动机开始工作,由增压阀门调节氧化剂流量,改变推进剂的燃烧速率,实现发动机的变推力控制[6-8]。其中,点火器、液路阀门和增压阀门的精确时序控制是发动机工作的关键环节,时序的精确控制便是完成固液动力探空火箭发射和实现发动机推力可变的关键技术。点火的可靠性直接关系发动机工作的成败,时序控制在发射过程中显得尤为重要。
本文针对固液混合动力探空火箭的总体结构和工作特性,设计并实现了用于探空火箭发射的时序控制系统,系统包括地面PLC时序控制分系统,箭载单片机时序控制分系统,地面和箭载时序控制匹配分系统。主要完成发射前地面供电到箭载供电的转换,数据采集设备的启动,点火器、液路电磁阀、增压电磁阀、主路吹除电磁阀、辅路吹除电磁阀的按时序精确关闭和开启。具有结构简单、安全可靠、研制周期短、现场可编程、对发射控制时序修改简单易行、能够在恶劣外界条件下稳定工作的特点。本文主要简述该系统的实现方法,以期对固液动力探空火箭的发展起到促进作用。
1 固液动力火箭地面发射控制系统时序要求
本文所涉及的探空火箭属于无控飞行器,即在火箭起飞后不再进行地面操作人员的实时控制。因此,要求在发射时序控制系统中设计从发射前准备到发射过程直至飞行过程中所需的所有时序控制,包括发射前准备阶段的时序控制、发射过程中的时序控制、火箭离开发射架飞行过程的时序控制。
如表1所示,发射前的准备阶段包括对复位信号、转电信号、地面供电信号的开关进行时序控制,系统应严格按照信号的开启顺序实施控制,在有限时间内完成发射前的准备过程及箭载控制电路转电控制,此部分由主控计算机对PLC发出控制命令,PLC按程序对箭载电路进行控制。
发射过程中的时序控制包括对转电信号、采集系统触发信号、点火器控制信号、液路电磁阀控制信号、增压电磁阀控制信号的开关进行时序控制。其中,转电信号关的时刻即为执行发射命令按下发射按钮的时刻,系统要求在点火器开启前800 ms开启采集系统触发信号,使采集系统进入工作状态。对点火器要求提供400 ms的脉宽信号,点火器信号关闭600 ms后,液路电磁阀和增压电磁阀同时开启,液路电磁阀开启后自锁不关闭,增压电磁阀开启3 s,固液发动机在此3 s内实现变推力控制。但由于火箭总体设计要求,液路电磁阀由地面供电,并由地面PLC直接控制,增压电磁阀由箭载供电,并箭载单片机直接控制。因此,出现了两者时序匹配的关键问题。本文在地面箭载时序控制匹配分系统中详细叙述了解决方案,并用示波器对时序匹配精度进行了测量,平均误差<±300 ms,满足火箭总体设计要求。
在固液混合动力探空火箭离开发射架的飞行过程中,只包括对辅路吹除电磁阀控制信号和主路吹除电磁阀控制信号的开启控制,系统要求在增压阀门关闭的同时,辅路吹除电磁阀开启并持续4 s,主路吹除电磁阀在辅路吹除电磁阀关闭40 s后,开启并持续4 s,这2个电磁阀都由箭载单片机时序控制系统完成。
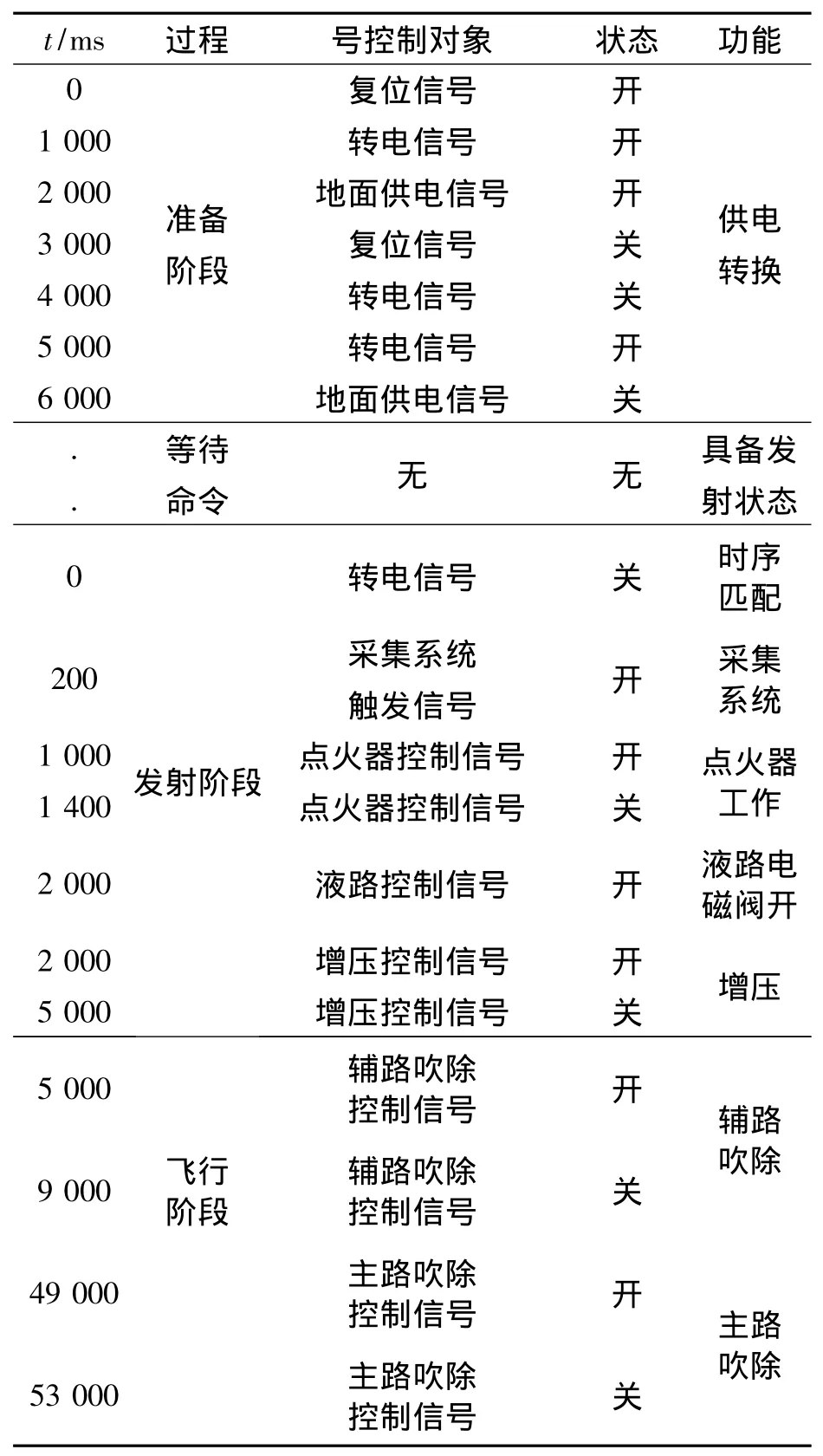
表1 总体控制时序Table 1 Overall sequence control
2 固液动力火箭地面PLC时序控制分系统
地面PLC时序控制系统是整个控制系统的核心部分,现场操作人员通过主控计算机对PLC发出指令。一部分指令(复位信号、转电信号、地面供电信号)是对箭载单片机的控制指令,继而对增压电磁阀、辅路吹除电磁阀、主路吹除电磁阀进行间接控制;另一部分指令(点火器控制信号、液路电磁阀控制信号)是对箭载点火器和液路电磁阀的直接控制指令。两部分指令关系到火箭发射整个流程,尤其点火器和液路阀门是固液动力发动机工作的关键所在,并直接影响发动机的工作性能[9]。固液混合动力火箭发动机的重复启动能力是其优点之一,美国火箭公司以及马歇尔空间飞行中心已多次对其点火控制进行了可行性研究[10]。可见,点火器控制的精确性是固液混合动力探空火箭发射时序控制系统可靠性的重要标志。
2.1 硬件控制系统设计
核心控制系统要求其控制装置具有极高的控制精度、可靠性和稳定性。因此,本系统选用以微处理器为基础的通用工业控制装置-可编程逻辑控制器PLC(西门子S7-200及EM222 RELAY扩展模块)作为控制装置,它不仅可靠性高、稳定性好、能适应恶劣外界条件,而且低成本、高质量、易编程、可扩展性好,并通过232转485通讯协议与主控计算机实时通讯[11]。
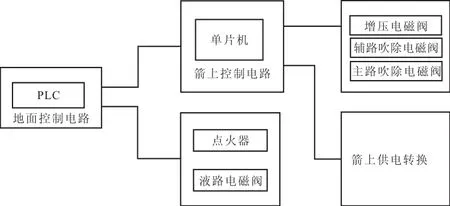
图1 地面PLC控制分系统结构图Fig.1 Ground PLC control subsystem structure
2.2 地面PLC对发射前准备阶段的时序控制
在固液动力探空火箭正式点火前,需一系列准备工作。其中,很重要一项是对箭载控制电路由地面供电向箭载锂电池供电转换。由于发射前需要长时间、多次对箭载电路进行功能测试,为减少箭载锂电池的使用,减轻火箭载荷,在发射前对箭载电路施行地面供电,直至发射前准备过程完成,才转换为箭载锂电池供电。PLC输出端子A、B、C分别控制箭载控制电路的复位信号、转电信号、地面供电信号。每一步间隔时间为1 000 ms,由PLC程序编程控制。时序见图2。
2.3 地面PLC对发射阶段的时序控制
发射阶段从转电信号关闭时刻开始,200 ms后由PLC输出端子D提供5 V触发信号,采集系统开始工作,触发信号开启后自锁不关闭。800 ms后,由PLC输出端子E控制点火器开启,开启信号持续400 ms关闭,关闭同时由PLC输出端子F控制的液路电磁阀和箭载单片机控制的增压电磁阀同时开启,液路电磁阀开启后自锁不关闭,增压电磁阀开启3 s后关闭。控制时序如图3所示。
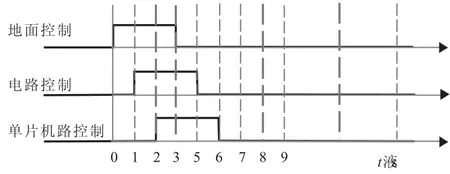
图2 准备过程时序Fig.2 Preparation process sequence
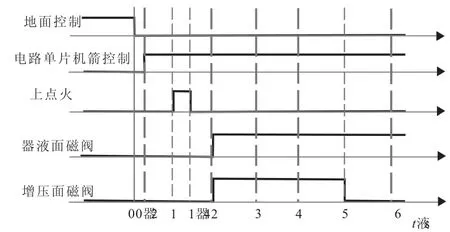
图3 发射过程时序Fig.3 Em ission process sequence
为完成PLC对点火器和液路电磁阀的时序控制,需将PLC控制的继电器分别接入点火器和液路电磁阀的开启回路。原理如图4所示,保护继电器是确保在火箭点火器开启之前点火器两端短接,不与电源接触,避免因为操作端的误操作而引起点火器误开启[12]。在点火命令发起之前,首先要打开保护继电器,保护继电器常闭触电断开,常开触电闭合,使得点火器电源负极与点火器一端接通。此时,由PLC程序按时序控制PLC继电器接通,使得点火器电源正极与点火器另一端接通,点火器电源与点火器构成完整回路,从而触发点火器开启,开启时刻及开启脉宽由PLC程序设定。液路电磁阀时序控制原理与点火器时序控制原理相同,不再赘述。
3 固液火箭箭载单片机时序控制分系统设计
箭载单片机时序控制分系统是整个控制系统的重要部分,在发射过程中,它严格按照预定时序控制增压电磁阀。文献[13]表明,只要简单改变氧化剂流量大小,就可使推力改变90%,性能只损失10%,而氧化剂流量大小通过增压电磁阀改变压力得到控制。因此,增压电磁阀的精确开启是实现火箭在飞行初期变推力控制关键环节。在飞行过程中,由于火箭为无控飞行,所以在火箭脱离发射架起的一切控制任务,均由箭载单片机按照预定时序控制完成,包括辅路吹除电磁阀和主路吹除电磁阀的时序控制,实现对火箭辅路通道和主路通道的氧化剂残留的清除。
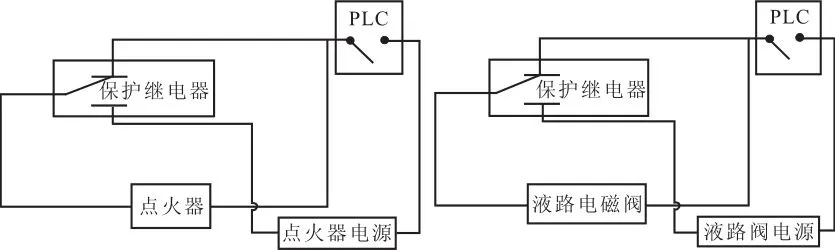
图4 地面PLC时序控制原理Fig.4 Ground PLC sequential control principle
3.1 硬件控制装置
箭载控制装置是一次性使用产品,飞行中不可维修,而且在发射直至飞行过程结束环境变化剧烈,文献[14]要求箭载控制系统具有足够高的可靠性和稳定性,能够克服震动、低温等恶劣条件;又由于是箭载控制系统,为了减小火箭载荷,控制系统应尽量选用可靠、重量轻、占用空间小的元器件进行设计。因此,本系统选用AT89S52系列单片机作为箭载的时序控制装置,达林顿驱动器(UL2003)作为驱动,通过C语言编写软件程序,运用中断方式,实现对箭载增压电磁阀、辅路吹除电磁阀和主路吹除电磁阀的时序控制。其具有体积小、重量轻、价格低、易开发的优点、并广泛用于工业控制领域,具有较高的可靠性和稳定性[15]。
3.2 单片机时序控制原理
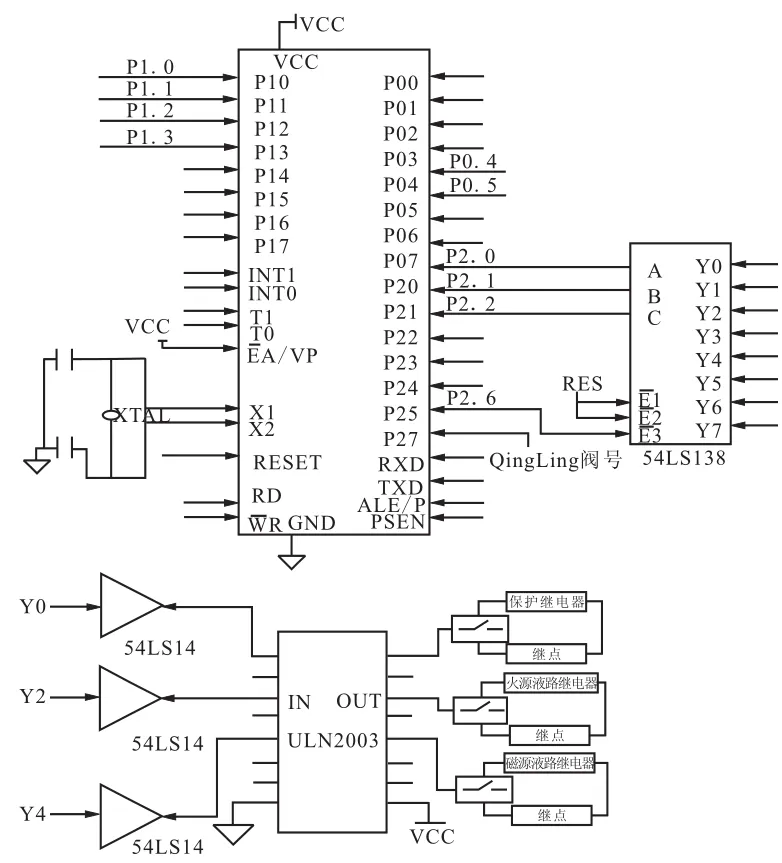
图5 箭载单片机时序控制原理Fig.5 The rocket MCU sequential control principle
对箭载控制电路而言,最关键的问题是增加电路逻辑上的可靠性和安全性,尤其是增压电磁阀的控制,若增压电磁阀误开启,会导致火箭储箱压力骤然增大,甚至会产生爆炸[16]。因此,系统采用 3-8译码器(54LS138),将控制线增加到了3条,只有3路控制信号同时正确,才会触发控制信号,起到时序控制作用;另外,2路信号由复位与紧急断电控制信号后反向得到,在火箭发射前起到安全保障作用。控制原理如图5所示,3个电磁阀的动作由AT89S52单片机的3路输出信号控制,3路输出控制信号经过3-8译码器(54LS138)译码后,通54LS14反相器[17]再由达林顿管(ULN2003)[18]分别驱动3个继电器吸合,从而接通增压电磁阀、辅路吹除电磁阀、主路吹除电磁阀的回路,控制电磁阀动作。其中,阀门开启的电源均由箭载锂电池提供,控制时序由C语言编程实现。箭载单片机控制系统对增压电磁阀、辅路吹除电磁阀、主路吹除电磁阀的控制时序如图6所示。
4 固液火箭地面和箭载时序匹配控制设计
整个时序控制分为地面PLC时序控制和箭载单片机时序控制。前者完成发射前的准备过程即箭载的电路的供电转换和点火器、液路阀门的按时序精确开启;后者完成增压电磁阀、辅路吹除电磁阀、主路吹除电磁阀的按时序精确开启。但火箭的总体设计要求由地面PLC控制的液路电磁阀和由箭载单片机控制的增压电磁阀同时开启,因此需要将2种时序控制器的时序相匹配,并达到ms级的匹配精度,才能保证火箭的整个发射控制任务顺利完成。

图6 箭载单片机控制时序Fig.6 Rocket MCU sequence
为完成地面时序控制和箭载时序控制的匹配,需设计一个将2个控制系统耦合起来的控制信号,考虑系统的简洁性、可靠性,选择转电控制信号作为耦合控制信号。在整个时序控制系统中2次用到转电信号,第1次是在发射前的准备过程中,完成对箭载电路的供电转换;第2次是在发射过程中,以转电信号关作为发射过程开始的标识。如图7所示转电控制信号关这一动作,将触发PLC和单片机同时计时。PLC计时200 ms后,采集系统触发信号开,800 ms后,点火器控制信号开启,开启400 ms后关闭,等待600 ms,液路电磁阀开启,此时PLC共延时2 s;转电信号关将给单片机P27发出“QL”低电平信号,单片机计时器低电平触发开始计时,2 s后增压阀门开启。此时,理论上将与PLC的2 s计时同步,即液路电磁阀与增压电磁阀同时开启,实现发动机大推力工作模式。这种时序匹配方法要求在发射前准备阶段过程中,“转电信号关”到“转电信号开”两步之间时间间隔必须小于2 s;否则,系统会误以为"转电信号关"的信号是发射开始信号,由系统软件设计两步之间时间间隔为1 s。

图7 地面PLC与箭载单片机时序匹配原理Fig.7 G round PLC and rocket MCU sequence matching principle
5 固液动力探空火箭时序控制系统测试
为验证时序控制系统的控制精度,采用示波器对PLC控制的点火器脉冲宽度、单片机控制的液路阀门脉冲宽度、PLC控制的液路电磁阀与单片机控制的增压电磁阀匹配误差进行测量。PLC对点火器信号脉宽400 ms,误差优于ms级。单片机对增压电磁阀的控制信号脉宽产生小于200 ms的误差。经多次测量,液路电磁阀与增压电磁阀匹配平均误差<±300 ms。
由测试结果可看出:PLC时序控制精度已经优于ms级,完全满足系统控制要求;单片机采用50 ms扫描周期,信号最多产生1个扫描周期的误差,此误差为控制装置本身决定,不可消除,但误差较小,不影响固液探空火箭发射控制;硬件电路采用继电器控制增压电磁阀开启,又因火箭总体涉及电磁继电器的控制,继电器的使用不可避免,因此单片机的时序误差无法从根本上消除,但该误差并不会对时序控制系统的正常工作带来影响,只是决定了系统的最终时序的不确定度,误差满足系统控制要求;因PLC和单品的控制电路硬件上的不同,必然会产生时序匹配误差,但此误差对固液动力探空火箭的发射不会造成影响,经多次火箭发动机靶场测试证明,此误差能满足系统控制要求。
6 结论
(1)设计并实现了一种固液混合动力探空火箭发射时序控制系统。克服了传统时序控制系统延时通道少、智能化程度低、延时精度差、不便于携带的缺点。此地面发射控制系统已经多次成功用于固液混合动力发动机的地面热试车,并2次成功完成固液混合动力飞行器的发射任务,系统运行稳定、可靠性高,能够适应恶劣的气象条件。
(2)所设计的控制系统采用地面PLC时序控制装置与箭载单片机时序控制相结合的控制方案,能达到固液混合动力火箭地面发射时序控制ms级的控制要求,为固液混合动力飞行器发展起到一定作用。
[1] 廖少英.固液火箭发动机性能特征[J].上海航天,2004(5):8-14.
[2] 蔡国飙.固液混合火箭发动机技术综述与展望[J].推进技术,2012,33(6):832-836.
[3] 蔡国飙,田辉,俞南嘉.固液混合火箭发动机技术[J].载人航天,2009(1):15-17.
[4] Rao Da-lin,CaiGuo-biao,Zhi Hao,et al.Design and optimization of variable thrust hybrid rocketmotors for sounding rockets[J].Sci.China Tech,Sci,,2012,55:125-135 doi:10.1007/s11431-011-4597-4.
[5] Zhu Hao,Cai Guo-biao,Rao Da-lin,et al.Optimal design of hybrid rocket motor powered vehicle for suborbital flight[J].Aerospace Science and Technology,doi:10.1016/j.ast,2011.12.014.
[6] Zeng Peng,Li Xin-tian,Li Jun-hai.Developmentof the variable thrust hybrid sounding rocket:BeiHang-3[R].Italy:International Astronautical Federation,2012.
[7] Altman D.Hybrid rocket developmenthistory[R].AIAA 91-2515.
[8] Martin J C,Kenneth K K.Fundamentals of hybrid rocket combustion and propulsion[M].USA:American Institute of Aeronautics and Astronautics,2007.
[9] Mead FB.Early developmengts in hybrid propulsion technology at the air force rocket propulsion laboratory[R].AIAA 95-2946.
[10] 胡建新,夏智勋,张钢锤.固液火箭发动机在空间发射上的应用前景[J].导弹与航天运载技术,2002,257(3):18-22.
[11] Dong Yu-lin,Zheng Chun-jiao.Design and Research of Embedded PLCDevelopment System[D].Liao Ning:Liao Ning University of Technology,2011.
[12] 宋佳,蔡国飙,孔德帅.一种固液动力飞行器地面发射控制装置[P].中国:CN102689698A,2012-05-23.
[13] Willians F A.Grain design and throttling of hybrid rocket motors[J].Chemical Engineering Progress Symposium Series,1966,62(61).
[14] 徐延万.控制系统[M].北京:中国宇航出版社,1989.
[15] 彭礴,张明敏,林飞龙.基于AT89S52高精度步进电机伺服控制系统设计[J].电子测量技术,2011,34(3):49-52.
[16] 杨玉新,胡春波,何国强.固液混合火箭发动机中的关键技术及其发展[J].宇航学报,2008,29(5):1616-1618.
[17] 孟武胜,李亮.基于AT89C52单片机的步进电机运动控制系统设计[J].测控技术,2006,25(11):45-47.
[18] 黄勇,廖宇,高林.基于单片机的步进电机运动控制系统设计[J].电子测量技术,2008,31(5):150-154.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
上海航天(2022年2期)2022-04-28
小猕猴智力画刊(2022年3期)2022-03-28
石油矿场机械(2020年4期)2020-08-01
铁道建筑技术(2020年11期)2020-05-22
宇航总体技术(2019年5期)2019-10-11
导弹与航天运载技术(2019年3期)2019-07-11
汽车电器(2018年5期)2018-06-07
电子制作(2017年13期)2017-12-15
汽车文摘(2016年10期)2016-12-07