
CRH3动车组牵引逆变器3种调制策略研究与仿真
2014-04-28 07:03丁菊霞蒋奎
电气传动 2014年6期
丁菊霞,蒋奎
(1.西南交通大学峨眉校区电气工程系,四川峨眉山 614202;2.南京航空航天大学自动化学院,江苏南京 210016)
CRH3动车组牵引逆变器3种调制策略研究与仿真
丁菊霞1,蒋奎2
(1.西南交通大学峨眉校区电气工程系,四川峨眉山 614202;2.南京航空航天大学自动化学院,江苏南京 210016)
为了研究CRH3动车组牵引逆变器所适合的调制策略,分别分析了正弦脉宽调制(SPWM)、电流滞环PWM(CHBPWM)和空间矢量脉宽调制(SVPWM)这3种调制方法的基本原理,证明了SVPWM调制直流电压利用率最高,并通过Matlab/Simulink对分别采用3种调制策略的电机逆变器控制系统进行对比仿真分析。仿真结果表明,采用SVPWM调制时的定子相电流畸变率和电磁转矩脉动均很小,是适合CRH3动车组牵引逆变器采用的一种调制策略。
CRH3动车组;正弦脉宽调制;电流滞环脉宽调制;空间矢量脉宽调制;仿真
CRH3型动车组是由我国唐山轨道客车有限公司和西门子公司合作生产的高速动车组,其运营速度达350 km/h。CRH3型动车组采用电压型两电平三相逆变器[1-2],并采用矢量控制策略[2]对电机进行控制,而逆变器有多种调制方式,如SP-WM 调制[3]、CHBPWM 调制[4]、SVPWM 调制[4]、SHEPWM[3]、最小纹波电流PWM[5]等。
本文针对CRH3动车组牵引逆变器,分别对SPWM调制、CHBPWM调制及SVPWM调制的原理进行了对比分析,并把3种调制方法分别应用于电机矢量控制系统中,通过Matlab/Simulink软件对其进行计算机模拟仿真,对3种调制策略的定子相电流、电机输出电磁转矩波形进行了比较分析。
1 SPWM调制
CRH3动车组牵引逆变器采用电压型二电平三相逆变器,牵引逆变器拓扑如图1所示。
当逆变器采用SPWM双极性调制时,a,b,c三相共用一个三角载波uc,而调制信号ura,urb,urc依次相差120°。三相按相电压分别进行调制,输出相电压PWM波形,如图2所示。
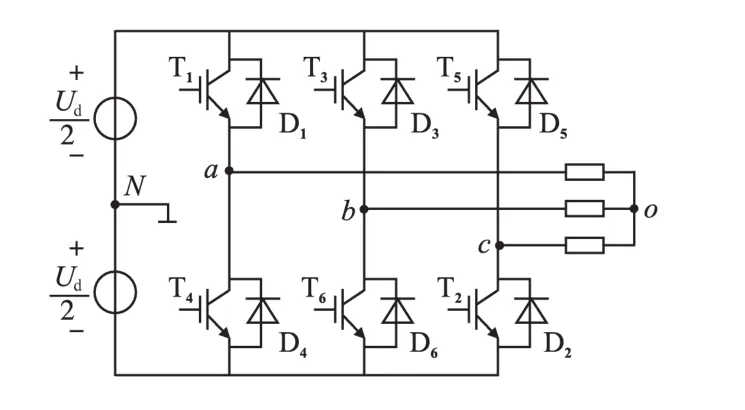
图1 牵引逆变器拓扑结构Fig.1 Traction inverter topology structure

图2 SPWM调制电压波形Fig.2 SPWM modulation voltage waveforms
把逆变器输出相电压、线电压通过傅里叶级数展开,可得相电压、线电压基波幅值

动车组牵引逆变器采用SPWM调制时,通常低频段采用异步调制方式,以改善系统的低频性能、减少负载转矩脉动和噪声;高频段采用分段同步调制,不同频段取不同N值,使输出波形对称。

2 CHBPWM调制
CHBPWM调制属于电流控制型调制方式,即反馈逆变器的输出电流,与电流给定值经滞环电流比较器比较后,得到相应桥臂开关器件的开关状态,使实际电流跟踪给定电流变化。以其中一项为例,CHBPWM调制原理[1]如图3所示。

图3 滞环电流PWM调制原理Fig.3 The principle of CHBPWM
图3中,HBC为滞环电流比较器,环宽为2Δi。将给定电流i*与输出实际电流i进行比较,若i<i*-Δi,HBC输出高电平,驱动上桥臂功率开关器件T1导通,变流器输出正电压,使i增大,当i增长到超出环宽时,即i>i*+Δi时,使HBC翻转,输出低电平,关断T1,并经延时后驱动T2,电流i逐渐减小,直到到达滞环偏差的下限值i*-Δi,使HBC再翻转,又重复使T1导通。这样,T1与T2交替工作,使输出电流i保持在给定值之间的偏差范围内,呈锯齿状跟踪给定正弦电流,因此,逆变器实质上成为了一个带有一定峰-峰值纹波的电流源。从图4中可以看到,输出电流十分接近正弦波。

图4 滞环电流PWM调制电流波形Fig.4 CHBPWM modulation current waveforms
CHBPWM调制的精度与滞环的环宽有关,同时还受到功率开关器件允许开关频率的制约。当环宽选得较大时,可降低开关频率,但电流波形失真较多,谐波分量高;如果环宽太小,电流波形虽然较好,却使开关频率增大了。通常希望能够设置一个综合考虑谐波成分以及逆变器开关损耗的最优带宽。
CHBPWM调制方法最大的优点是电路简单,且动态性能好、输出电压不含特定频率的谐波分量,可直接限制器件的峰值电流。缺点是PWM开关频率不固定,从而造成严重的噪音,和其他方法相比,同一开关频率下输出电流中所含谐波较多。
3 SVPWM调制
3.1 SVPWM调制原理
牵引逆变器拓扑结构如图1所示。定义上桥臂为“1”状态,下桥臂为“0”状态,则逆变电路共有8种开关组合模式。8种开关模式下的空间电压矢量图如图 5所示[1]。
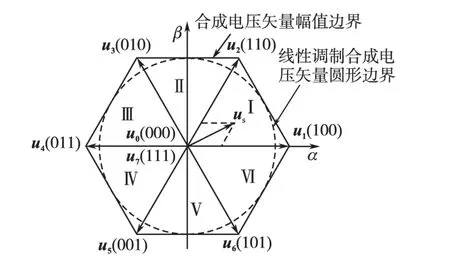
图5 空间电压矢量图Fig.5 Space voltage vector diagram
当定子相电压ua,ub,uc为三相对称正弦电压时,可以推导出us是一个以电源频率ω为角速度作恒速旋转的空间矢量[1]。
3.2 SVPWM调制算法
通过8种电压矢量的不同组合,使定子磁链轨迹逼近圆形或正多边形,以第I扇区为例,图6为由基本电压空间矢量u1,u2合成期望输出电压矢量us。

图6 电压空间矢量线性组合Fig.6 Voltage space vector linear combination
由伏秒平衡原理解得t1,t2[1]。随着参考电压空间矢量us模的增加,t1,t2也线性增大,t0逐渐变小,但要使合成电压矢量在线性区内就必须满足





由式(2)和式(3)可得即SVPWM方式比SPWM方式的直流电压利用率最多可提高15.47%。
4 3种调制方法仿真比较
4.1 CRH3动车组电机逆变器控制系统
无论是采用SPWM,CHBPWM还是SVPWM调制,其目标均是产生变压变频的三相交流电,以驱动牵引电机,并保证牵引电机具有良好的静、动态性能。CRH3动车组电机逆变器控制系统框图如图7所示,其中的恒速控制器采用双滞环恒速控制器[6],电机控制采用间接磁场定向矢量控制策略[2]。需要说明的是,图7所示的控制框图是以SVPWM调制为例的,当采用SPWM,CHBPWM调制时,产生触发脉冲模块部分有所不同。
为便于比较分析,控制系统参数统一设为CRH3动车组实际参数:逆变器输入直流电压3 200 V,牵引电机额定功率562 kW,额定线电压2 700 V,额定频率 138 Hz,极对数 2,定子电阻0.15Ω,转子电阻0.16Ω,定子漏感1.42 mH,转子漏感0.6 mH,互感25.4 mH,转动惯量1.5 kg·m2。通过Matlab/Simulink分别建立基于上述3种调制策略的电机逆变器控制系统仿真模型。
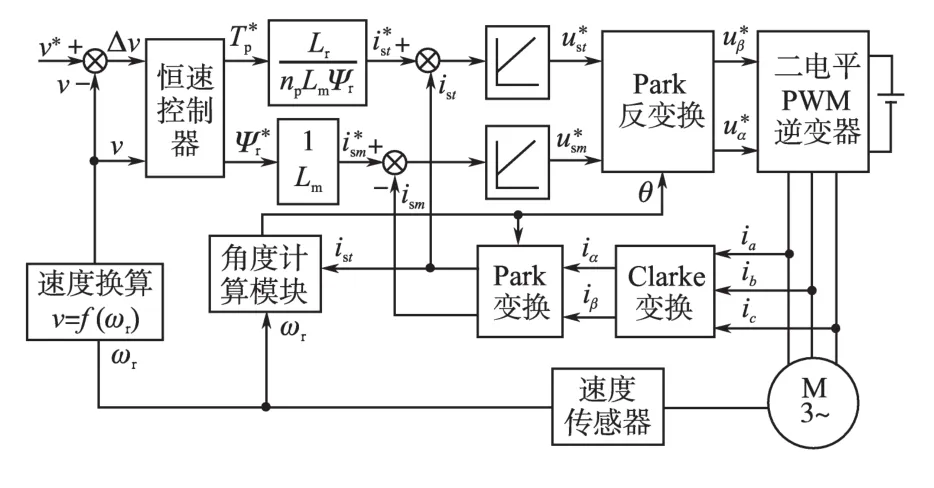
图7 CRH3动车组电机逆变器控制框图Fig.7 CRH3 EMU motor inverter control block diagram
4.2 牵引逆变器3种调制方法仿真比较分析
为了比较3种调制策略应用于矢量控制系统中的优劣,在t=0~0.7 s时,动车组速度给定v*=250 km/h,t=0.7~1.5 s时,速度给定为v*=30km/h;负载转矩由实际运行速度决定[2]。本文针对3种调制策略应用于牵引逆变器,主要对定子相电流、牵引电机输出电磁转矩的仿真结果进行对比分析。4.2.1 牵引电机定子相电流
采用3种调制策略时电机定子a相电流波形如图8所示。

图8 定子a相电流仿真波形Fig.8 Simultion waveforms stator current of a phase
从图8可以看出,当牵引逆变器采用SPWM调制方式时,定子相电流正弦度较低,存在较高的谐波含量,从而产生的定子磁链轨迹偏离圆形;当采用CHBPWM调制方式时,定子相电流波形正弦度相对于SPWM调制方式有较大的提高,谐波更少,说明定子相电流跟踪给定电流性能较好;当牵引逆变器采用SVPWM调制策略时,定子相电流较SPWM,CHBPWM调制方式正弦度是最高的,谐波含量很少,从而使产生的定子磁链轨迹非常接近于圆形。
4.2.2 牵引电机输出电磁转矩
牵引电机输出电磁转矩仿真波形如图9~图11所示。从图9~图11可知,在t=0 s时,给定速度为250 km/h,列车运行于牵引工况,电机按牵引特性输出电磁转矩,在0.3 s左右时,电机输出电磁转矩达到稳态与负载转矩相等,进入恒速运行;同样由于在t=0.7 s时给定速度降为30 km/h,列车开始制动,电机按制动特性曲线输出电磁转矩,在1 s左右时进入恒速运行。

图9 SPWM调制下电机输出电磁转矩Fig.9 Electromagnetic torque in SPWM modulation
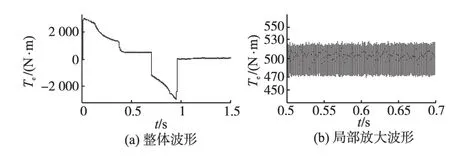
图10CHBPWM调制电磁转矩Fig.10 Electromagnetic torque in CHBPWM modulation

图11 SVPWM调制电机电磁转矩Fig.11 Electromagnetic torque in SVPWM modulation
通过比较分析可知,采用SPWM调制策略时,牵引电机输出电磁转矩脉动峰峰值约200 N·m;采用CHBPWM调制时,电机输出电磁转矩脉动峰峰值约60 N·m;采用SVPWM调制时,电机输出电磁转矩脉动峰峰值仅为10 N·m。由此可知,SVPWM调制时牵引电机输出电磁转矩脉动较其他两种调制策略小得多,从而电机运行更平稳,噪音更小。对于频繁启停、加减速,并且要求运行平稳的高速动车组,SVPWM是一种较佳的调制策略,而且如果将SVPWM调制策略与矢量控制等高动态性能的控制技术相结合,将会得到很好的控制性能。
5 结论
本文阐述了CRH3动车组牵引逆变器SPWM,CHBPWM,SVPWM 3种调制方法的原理,对3种调制策略在电机逆变器矢量控制系统中的应用,通过Matlab/Simulink软件进行了仿真对比分析。仿真结果表明,CHBPWM和SVPWM两种调制策略比SPWM调制策略更优,但采用CHBPWM调制时,定子电流的跟踪精度与滞环环宽有关,因此,综合比较,CRH3动车组牵引逆变器更适合采用SVPWM调制策略。
[1] 冯晓云.电力牵引交流传动及其控制系统[M].北京:高等教育出版社,2009.
[2] 冯晓云,王利军,葛兴来,等.高速动车组牵引传动控制系统的研究与仿真[J].电气传动,2008,38(11):25-28.
[3] 陈国呈.PWM逆变技术及应用[M].北京:中国电力出版社,2007.
[4] 曾允文.变频调速SVPWM技术的原理、算法与应用[M].北京:机械工业出版社,2011.
[5] 阮毅,陈伯时.电力拖动自动控制系统-运动控制系统[M].第4版.北京:机械工业出版社,2011.
[6] 李官军,冯晓云,王利军,等.高速动车组恒速控制策略的研究与仿真[J].机车电传动,2007(5):12-14.
[7] 徐德鸿,马皓,汪槱生.电力电子技术[M].北京:科学出版社,2010.
[8] Bimal K Bose.现代电力电子学与交流传动[M].王聪,赵金,于庆广,等,译.北京:机械工业出版社,2006.
修改稿日期:2014-01-07
Research and Simulation on Three Modulation Strategies of Traction Inverter in CRH3 EMU
DING Ju-xia1,JIANG Kui2
(1.Department of Electrical Engineering,Southwest Jiaotong University Emei Campus,Emeishan614202,Sichuan,China;2.Institute of Automation,Nanjing University of Aeronautics and Astronautics,Nanjing210016,Jiangsu,China)
Aiming at studying the modulation strategy suitable for traction inverter of CRH3 motor train unit,the basic principle of SPWM,current hysteresis PWM and SVPWM modulation methods were analyzed respectively,and it is proved that the DC voltage utilization rate of SVPWM modulation is the highest,simulation analysis is also made by Matlab/Simulink.Simulation results show that the distortion rate of stator phase current and the ripple of electromagnetic torque are both small when using SVPWM,so SVPWM modulation strategy is suitable for traction inverter of CRH3 EMU.
CRH3 motor train unit;sinusoidal pulse width modulation(SPWM);current hysteresis band pulse width modulation(CHBPWM);space vector pulse width modulation(SVPWM);simulation
TM464
A
中央高校基本科研业务费专项资金资助(2682013CX007EM)
丁菊霞(1977-),女,博士研究生,副教授,Email:northdingding@163.com
2013-07-09
猜你喜欢
科技创新导报(2022年17期)2022-09-22
微电机(2022年1期)2022-03-21
防爆电机(2021年1期)2021-03-29
海峡姐妹(2020年2期)2020-03-03
铁道通信信号(2018年11期)2019-01-19
测控技术(2018年2期)2018-12-09
制造技术与机床(2017年12期)2017-02-02
铁道通信信号(2016年11期)2016-06-01
电机与控制应用(2015年10期)2015-03-01
电测与仪表(2014年21期)2014-04-04
