丰田普锐斯典型工况测试及控制策略分析
2014-04-21 07:20:08孙远涛张金柱王云龙范德会朱荣福
交通科技与经济 2014年5期
孙远涛,张金柱,王云龙,范德会,朱荣福
(黑龙江工程学院 汽车与交通工程学院,黑龙江 哈尔滨150050)
随着世界能源的日益枯竭及汽车保有量的急剧增长,导致各国的能源危机不断加深、气候环境不断恶化。解决能源短缺、环境污染这两大问题已成为当今世界各国的首要任务。由于混合动力汽车同时具备传统汽车的续驶里程长、燃料补给快捷以及纯电动汽车具有的节能、低排等优点,现已成为目前最具可行性、可操作性的节能环保型汽车,并引领汽车技术的未来发展趋势。丰田普锐斯是世界上最早商业化生产的混合动力汽车,目前,也是世界上最成功的混合动力车型之一。因此,对其典型工况运行模式进行测试及控制策略研究具有重要的现实意义。
1 普锐斯典型工况实验内容及测试条件
1.1 实验内容
本测试对普锐斯汽车(第二代)在车辆起步、加速、匀速及减速滑行等典型工况进行测试,并根据每个工况的特点进行不同情况下的测试。
起步工况按照SOC值偏低(60%以下)、SOC值较高(60%以上)两种状态进行测试。加速工况按照全油门加速工况测试,并根据SOC值偏低、较高两种状态进行测试,加速区间为0~100km/h。匀速工况分别在SOC值偏低、较高两种状态下进行,并以10km/h为速度间隔,10~80km/h速度为区间进行测试。试验过程中应尽量保持速度稳定,减速滑行工况采用D档滑行状态,滑行速度区间为60~30km/h。
在上述各工况的测试中主要观察SOC值、发动机转速、发电机(MG1)和电动机(MG2)的转速及扭矩等参数的变化并记录分析。
1.2 测试条件
本测试采用丰田普锐斯(第二代)车和丰田专用故障诊断仪进行测试,主要对环境条件、道路要求等方面按照相关标准要求进行如下测试。
1)环境条件为:晴天,微风,室外气温20℃左右;
2)道路条件为:干燥的沥青路面,在测量区和加速区后200m的纵向坡度不超过0.5%。加速区的纵向坡度不超过4%,测量区的横向坡度不超过3%。
2 普锐斯典型工况模式测试及控制策略分析
试验前将丰田专用故障诊断仪(即Intelligent Tester 2)连接到普锐斯的数据链路连接器上,再将点火开关转到ON,然后按下“自动”或“手动”模式,进入检测模式。选择的检测项目主要包括:SOC值,车速,MG1输出扭矩及MG2输出扭矩等参数。进入相关工况的检测状态,进行测试,测试状态中的普锐斯车和测试仪器如图1所示。
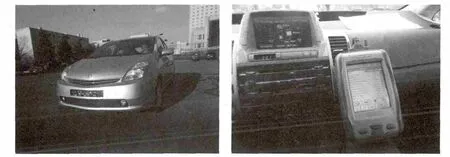
图1 测试中所采用的普锐斯车和测试仪器
2.1 车辆起步工况
2.1.1 SOC值在60%以下时的起步工况
混合动力控制系统记录了车辆起步工况时SOC值在60%以下的发动机转速、发电机(MG1)转速和扭矩、电动机(MG2)转速和扭矩以及SOC值随时间的变化情况(以上6个参数简称为各参数,下同),测试时间是从起车后的10.9s到23.2s,各参数随时间的变化情况如图2所示。
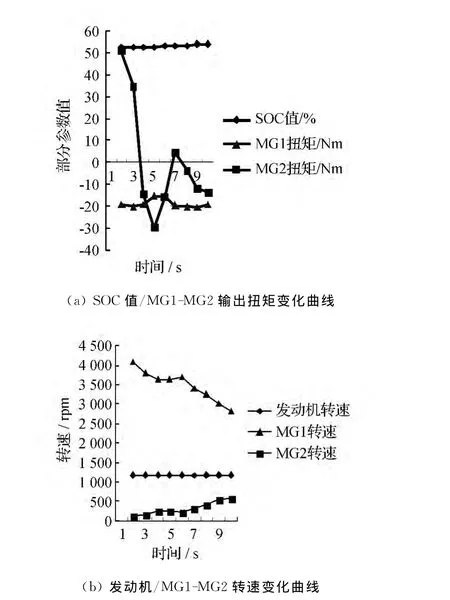
图2 车辆起步工况(SOC值偏低)各参数变化情况
从图2可看出:SOC值随时间变化缓慢增加;MG1输出负扭矩;在MG2工作时,先输出正扭矩,再输出负扭矩;发动机启动并工作。由此可得出此时的控制策略为:发动机工作并带动MG1工作为动力蓄电池充电,MG2作为辅助动力驱动车辆运行。
2.1.2 SOC值在60%以上时的起步工况
测试时间是从起车后的8.8s到14.7s,各参数随时间变化情况如图3所示。
从图3可以看出:SOC值随时间变化略有增加;MG1输出负扭矩;当MG2工作时,先输出正扭矩,再输出负扭矩;车辆启动一段时间后发动机再启动并工作。由此可得出此时的控制策略:MG2先单独驱动车辆,之后发动机工作且带动MG1工作,并为动力蓄电池充电。
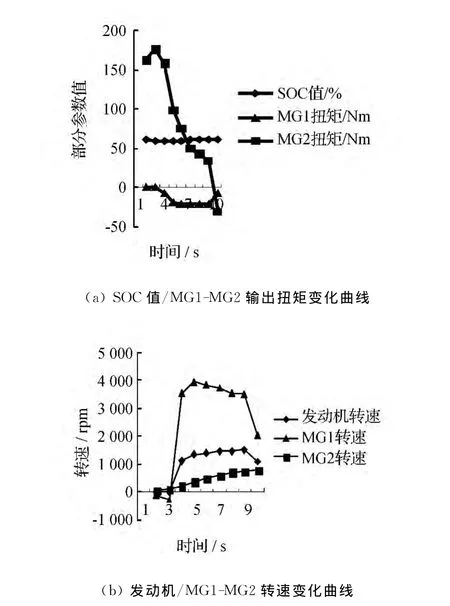
图3 车辆起步工况(SOC值偏高)各参数变化情况
2.2 加速行驶工况
测试全油门加速工况下的各参数值。
2.2.1 SOC值在60%以下时的行驶工况
测试车辆在0~100km/h时的加速时间及各参数随时间的变化情况,加速时间一般为从起车后的11.1s到22.7s,各参数随时间变化情况如图4所示。
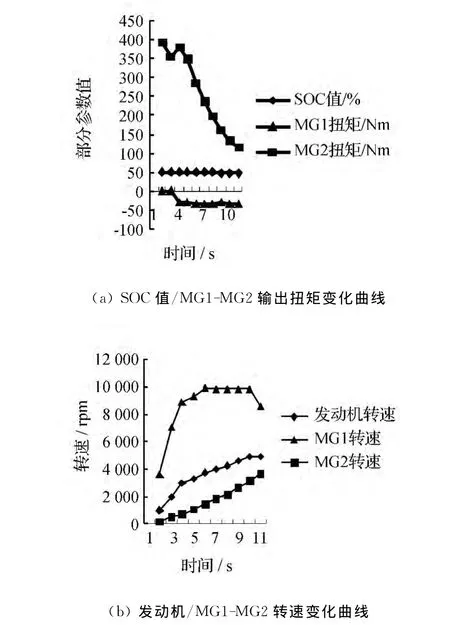
图4 车辆加速工况(SOC值中等)各参数变化情况
从图4可看出:SOC值随时间变化而略有减小;MG1输出负扭矩;MG2输出正扭矩,并逐渐减小;发动机启动并工作。由此可得出此时的控制策略:MG2和发动机作为动力源同时工作,并且发动机的输出动力只用于驱动车辆。
2.2.2 SOC值在60%以上时的行驶工况
测试车辆在0~100km/h时的加速时间及各参数随时间的变化情况,加速时间一般为从起车后的10.8s到22.5s,各参数随时间变化情况如图5所示。
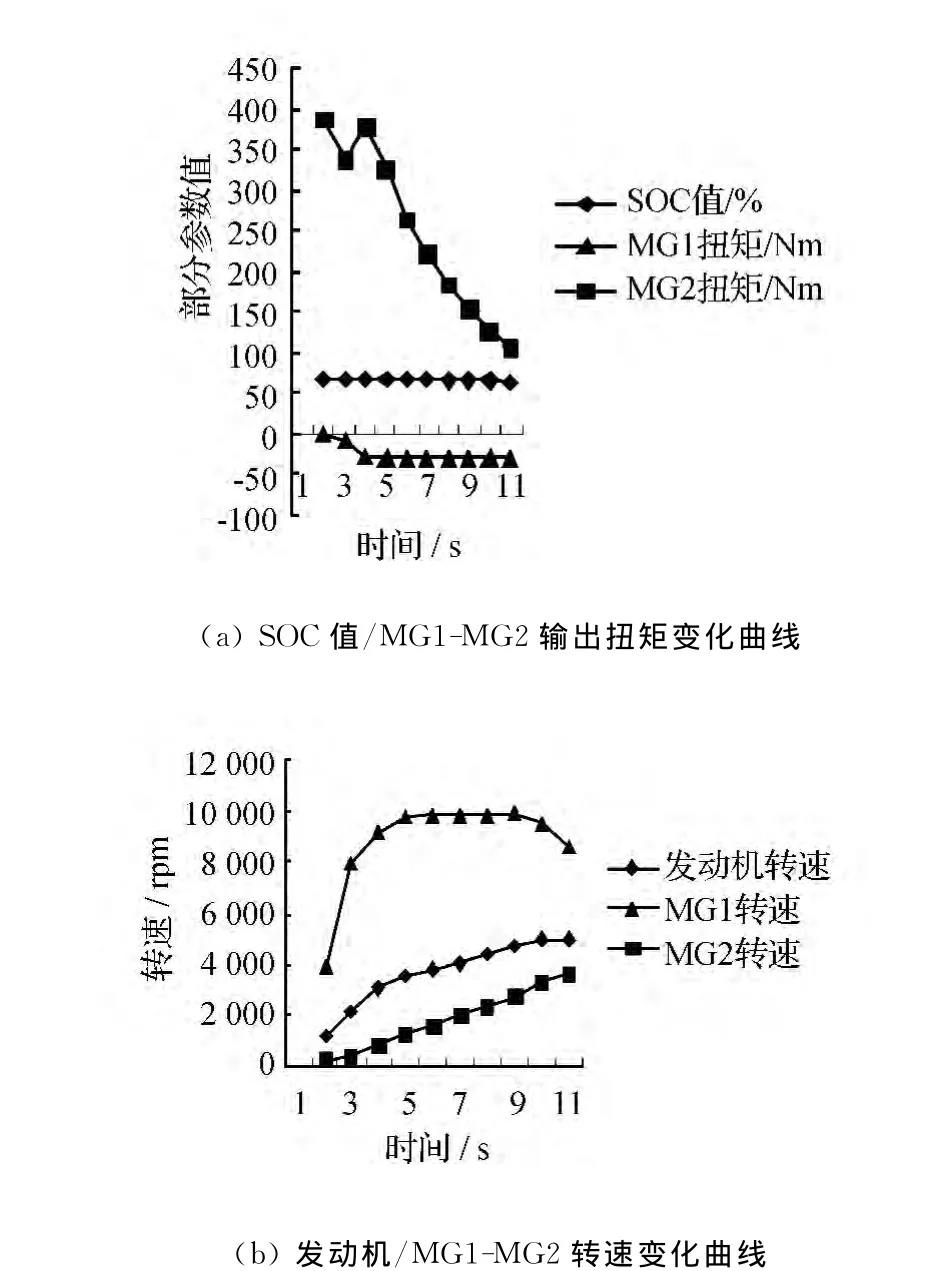
图5 车辆加速工况(SOC值偏高)各参数变化情况
从图5可看出:各参数值与SOC值在60%以下时的变化趋势相同,因此,控制策略也相同。
2.3 匀速工况
2.3.1 SOC值在60%以下的匀速工况
选择10km/h,20km/h,30km/h,…,70km/h工况,观察各参数值的变化,如图6所示。
从图6可以看出:SOC值先略有增大后略有减小;MG1输出负扭矩;MG2输出负扭矩;发动机工作转速先减小再有较大幅度的增大。由此,可得出此时的控制策略:发动机先以低速运转且带动MG1工作为动力蓄电池充电,再以高速运转输出动力,MG2作为发电机工作为动力蓄电池充电。
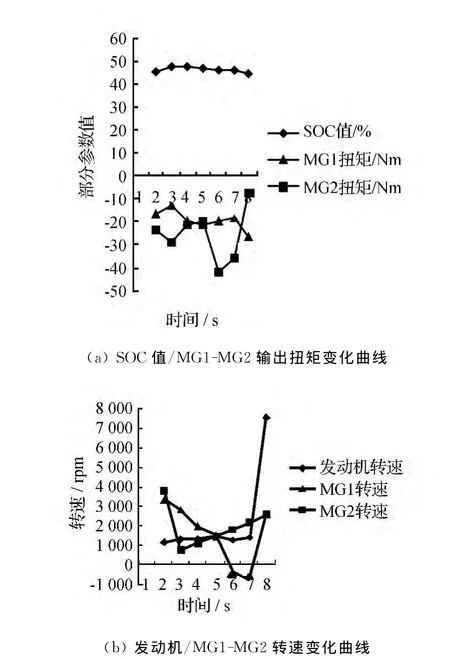
图6 车辆匀速工况(SOC值偏低)各参数变化情况
2.3.2 SOC值在60%以上的匀速工况
选择10km/h,20km/h,30km/h,…,90km/h工况,观察各参数值变化,如图7所示。
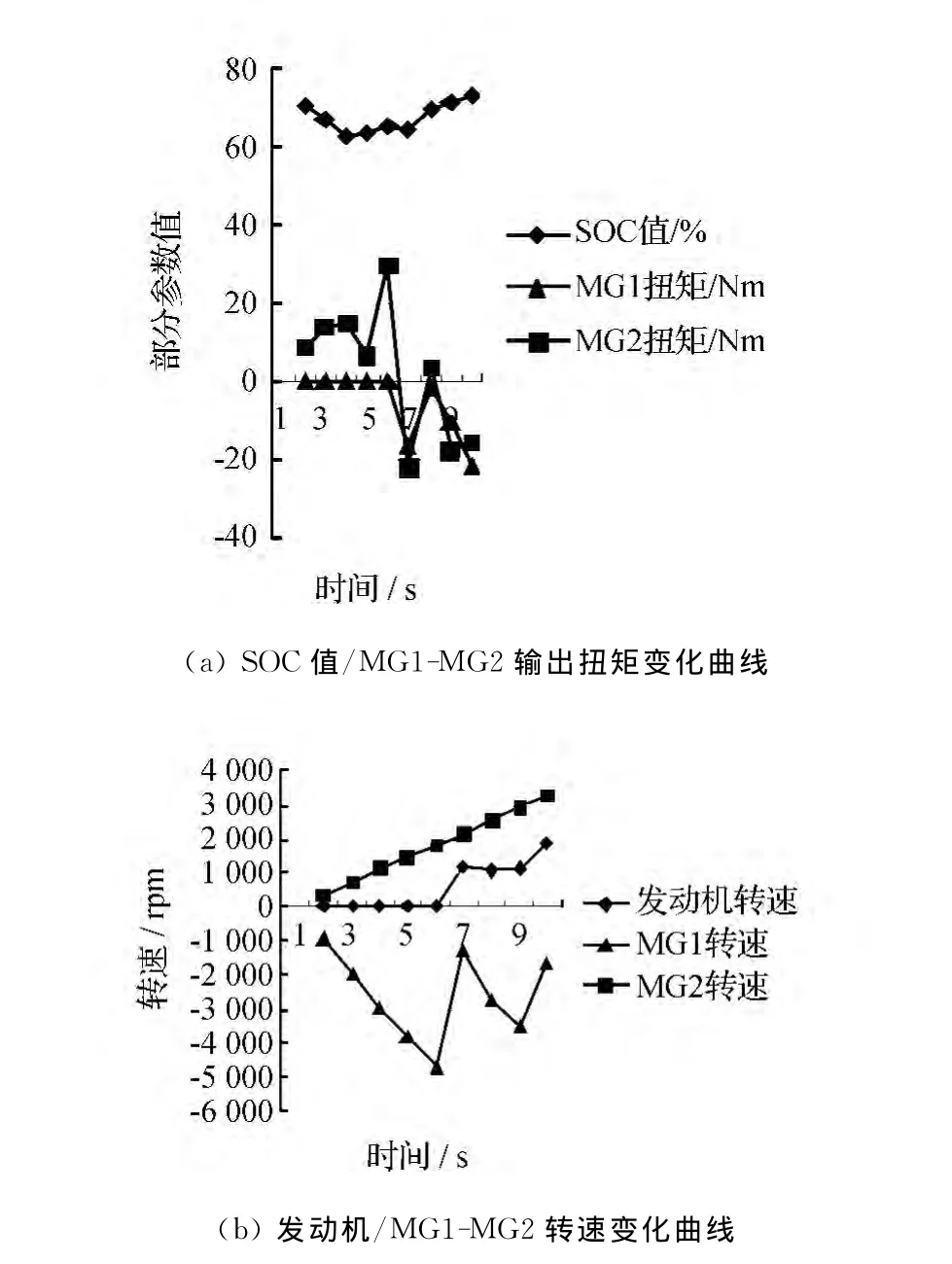
图7 车辆匀速工况(SOC值偏高)各参数变化情况
从图7可看出:SOC值先略有减小,然后增大;MG1刚开始不工作,之后启动并输出负扭矩;MG2工作先输出正扭矩,再输出负扭矩;发动机先不工作,之后启动并工作。由此可得出此时的控制策略:车辆运行之初动力源只有MG2,运行一段时间后发动机启动并工作,且带动MG1工作为动力蓄电池充电。
2.4 滑行工况
采用D档滑行,滑行速度为60~30km/h,观察各参数变化,如图8所示。
2.4.1 SOC值在60%以下的滑行工况
从图8可看出:SOC值小幅度增加;MG1不输出扭矩;MG2工作并输出负扭矩;发动机不工作。由此可得出此时的控制策略:发动机不工作,MG2作为发电机工作并为动力蓄电池充电。
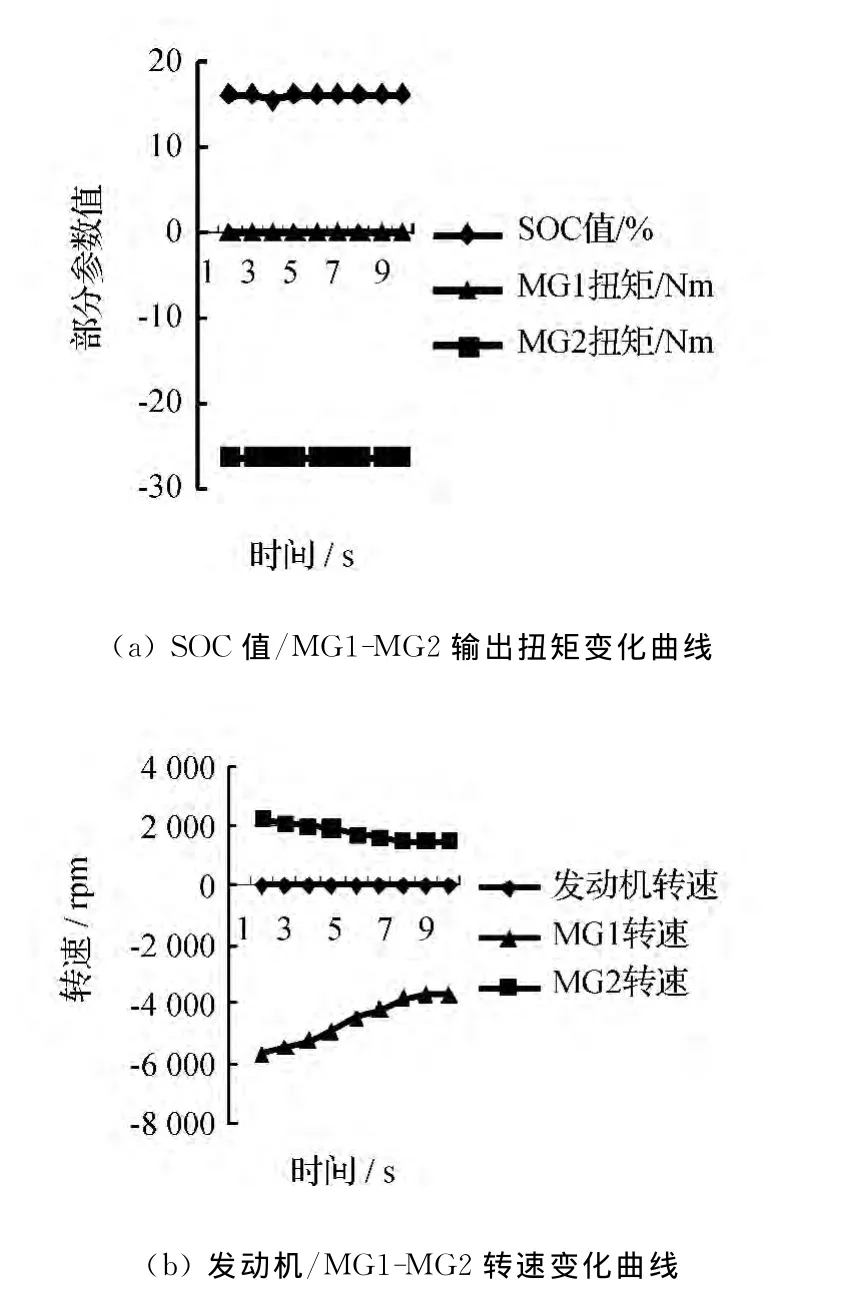
图8 车辆滑行工况(SOC值中等偏下)各参数变化情况
2.4.2 SOC值在60%以上的滑行工况
从图9可看出:各参数值与SOC值在60%以下时的变化趋势相同,因此,控制策略也相同。
3 结 论
通过测试丰田普锐斯在各典型工况下的工作状态,得出SOC值在高、低两种状态下对各动力总成的控制策略:
1)在起步和匀速两种工况下,两种动力源都是有条件的参与工作;
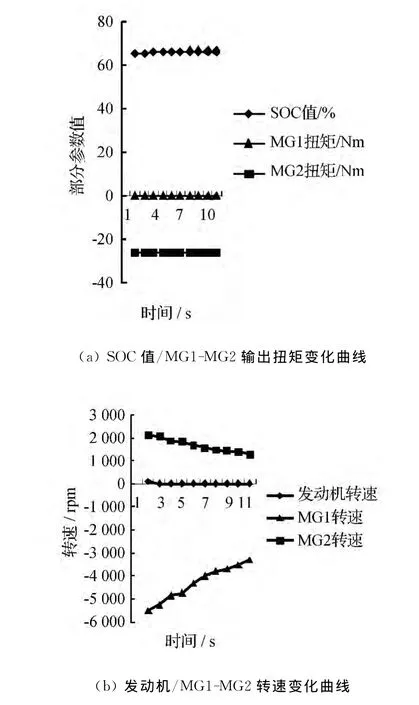
图9 车辆滑行工况(SOC值偏高)各参数变化情况
2)在加速工况下,两种动力源同时工作;
3)在滑行工况下,发动机不工作,MG2作为发电机工作。
通过对普锐斯典型驱动工况的测试,不仅对研究普锐斯复杂的动力总成工作规律具有很好的参考价值,也对研究成熟的混联式混合动力汽车的控制策略具有重要意义。
[1]Valerie H.Johnson.HEV control Strategy for Real-Time Optimization of Fuel Economy and Emission.Computer and Communications.2006,24(1):130-136.
[2]孙鹏龙,付主木.混合动力汽车再生制动模糊控制策略[J].计算机仿真,2014,31(2):210-214.
[3]陈智家,陈祥丰,欧阳海.混合动力汽车控制策略研究现状及发展趋势[J].汽车工程师,2009(10):18-20.
[4]林歆悠,孙冬野.混联式混合动力客车驾驶员风格自适应控制策略研究[J].机械传动,2014,38(4):18-20.
[5]Zahra Amjadi,Student Member,IEEE and Sheldon S.Williamson.Novel Control Strategy Design for Multiple Hybrid Electric Vehicle Energy Storage Systems,2009.
[6]张鹏,储江伟.城市混合道路行驶工况的能量利用率研究[J].交通科技与经济,2014,16(4):99-103.
[7]龚贤武,吴德军,高闯,等.混联型混合动力汽车建模及控制策略研究[J].郑州大学学报:工学版,2014,35(3):73-77.
[8]王保华.混合动力城市客车控制策略与试验研究[D].上海:上海交通大学,2008.
猜你喜欢
客车技术与研究(2023年6期)2023-12-19 01:21:18
——全新丰田普锐斯PHEV
世界汽车(2023年4期)2023-05-30 02:10:50
中国煤层气(2021年5期)2021-03-02 05:53:14
能源工程(2020年6期)2021-01-26 00:55:22
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
凿岩机械气动工具(2017年3期)2017-11-22 07:21:50
通信电源技术(2016年1期)2016-04-16 04:57:26
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:50
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:50