基于圆柱筒支撑紧缩场极坐标测试扫描系统的研制
2014-04-13 09:30曹铁泽孙安斌王继虎
计测技术 2014年4期
曹铁泽,孙安斌,王继虎
(中航工业北京长城计量测试技术研究所,北京100095)
0 引言
紧缩场是紧缩平面场的简称,其英文名称为CATR(Compact Antenna Test Range),它能够将点源产生的球面波在近距离内变换成为平面波,从而可以在近距离上提供一个性能优良的平面微波测试区。对紧缩场性能鉴定有多种方法,国际上最通用的方法是探头扫描法,即用标准探头直接对紧缩场测试区准平面波场的幅度和相位进行测试评估[1]。紧缩场测试扫描架(以下简称:紧缩场扫描架)用于安装测试用探头天线,保证探头天线在测试区域内移动时探头天线口面处于同一个平面上。因此,紧缩场扫描架是紧缩场最终性能指标检测和评定的重要设备[2]。
目前紧缩场扫描架的主要结构有两种,分别是直角坐标扫描架和极坐标扫描架,其中直角坐标扫描架主要用于小型紧缩场的性能检测,而极坐标扫描架则用于大型紧缩场的性能测试。通常极坐标扫描架以塔式结构为主,为了保证其直线度或平面度,所设计的结构复杂、笨重、不易安装。随着紧缩场技术的发展,紧缩场静区的尺寸和频率都在不断增大和提高,如艾斯特里厄姆航天公司(EADS Astrium)为开展卫星的RCS 测量工作,建立了 CCR20/17,CCR75/60 和CCR120/100 三种型号的卡赛格仑补偿式紧缩场,其静区直径的大小分别为1.3,5,8 m,最高工作频率分别为400,200,100 GHz[3-4],这就要求所对应的测试扫描架的平面度(在行波方向的偏移量)分别为0.008 mm(RMS),0.015 mm(RMS)和0.03 mm(RMS)。目前国内用于飞机性能测试的紧缩场其最高工作频率要求已经达到75 GHz,为了满足该类紧缩场性能测试的要求,本文设计了一种带自动补偿的高精度圆柱筒支撑结构紧缩场扫描架,该扫描架克服了纯机械装置其精度难保证的缺点,同时满足了紧缩场静区质量快速检测、扫描架结构简单且安装方便等要求。
1 结构设计
1.1 设计要求
圆柱支撑扫描架是为了满足多种紧缩场静区快速检测需要而设计的极坐标扫描架。设计的目标是满足静区范围在3.5 m×3.5 m 内、静区高度在5 ~8 m 之间、最高工作频率为75 GHz、相位不平度不大于6°的紧缩场检测的需要。
扫描架技术要求:扫描架一次性扫描范围为3.5 m×3.5 m,扫描架扫描中心最高高度为8 m,扫描架扫描的平面度的实时测量误差为0.04 mm。
1.2 总体结构设计
圆柱筒支撑结构极坐标扫描架总体结构如图1所示,扫描架的主要组成部件有:底座部件,固定支撑部件,斜拉部件,转接支撑部件,自动转向机构,扫描部件,平面度补偿机构等。为方便描述,建立全局坐标系,正对来波方向为X 轴正向,竖直向上方向为Z 轴正向,建立右手坐标系如图1所示。
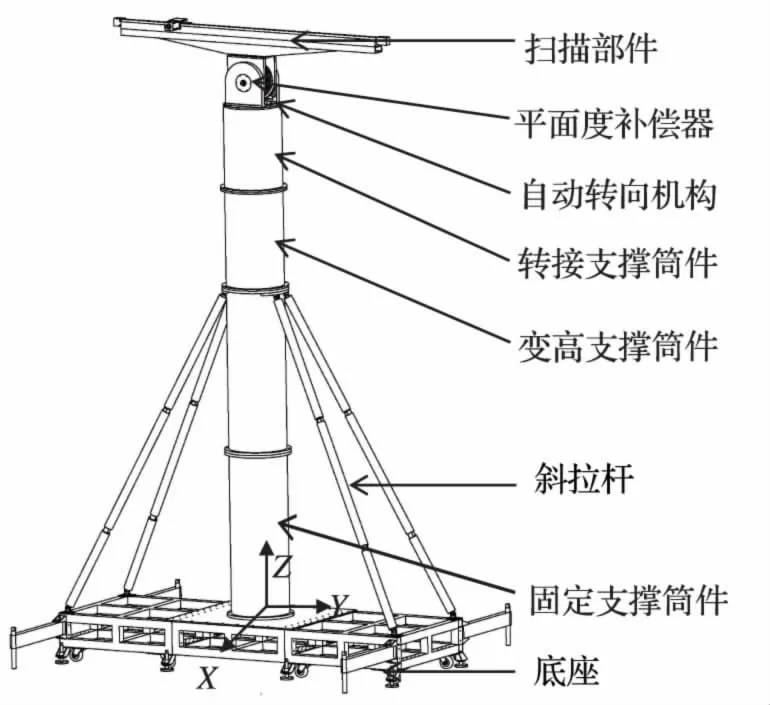
图1 圆柱筒支撑极坐标扫描架结构图
扫描架结构具体特点如下:扫描部件导轨采用硬铝型材导轨作为扫描探头滑台的驱动定位部件,通过导轨直线度调整块来保证导轨的整体直线度优于0.10 mm,导轨在行波方向对称放置,驱动电机采用导轨下侧放置形式,以实现重心在行波方向前后对称,导轨有效行程3.5 mm。导轨支撑桁架采用硬铝材料焊接而成,外面支撑板法线与行波方向成155°,以防止电磁波沿原路返回。
主支撑部件和结构采用圆柱支撑方式,以此来简化结构并通过粘结吸波材料减少扫描架自身的RCS(雷达散射截面面积)值。主支撑结构具有7 m 以上高度,在支撑结构顶端不可避免地会有较大的挠度,为减少挠度本文采用了斜拉杆并施加预应力方式来增加结构的整体刚度。转接部件是为适应不同高度紧缩场静区检测需要而配做的圆柱支撑筒。底座部件是支撑扫描架整体结构的基础,具备水平调整和方位调整功能,底部部件主体结构由方钢焊接而成,最终通过三块拼接而成,侧面设计有可折叠支架以增加其支撑范围。
1.3 转向机构设计
自动转向机构是实现扫描架水平工作状态与竖直工作状态之间自动转换以及保证转向后扫描架探头平面度的关键机构。其结构如图2所示,该转向机构将蜗轮固定在转向部件中间支撑筒上,支撑筒与扫描架支撑架通过螺栓连接。驱动电机及蜗杆安装在底座上,电机驱动蜗杆转动就可驱动扫描架部件转动。该结构通过锁紧前后螺母施加预载荷将角接触轴压紧来保证其无间隙运行。在蜗轮副中采用双螺距渐厚蜗杆传动、在轴承安装套上安装调整套使得蜗杆能够在蜗杆轴向调整,以消除蜗轮副的吻合间隙。
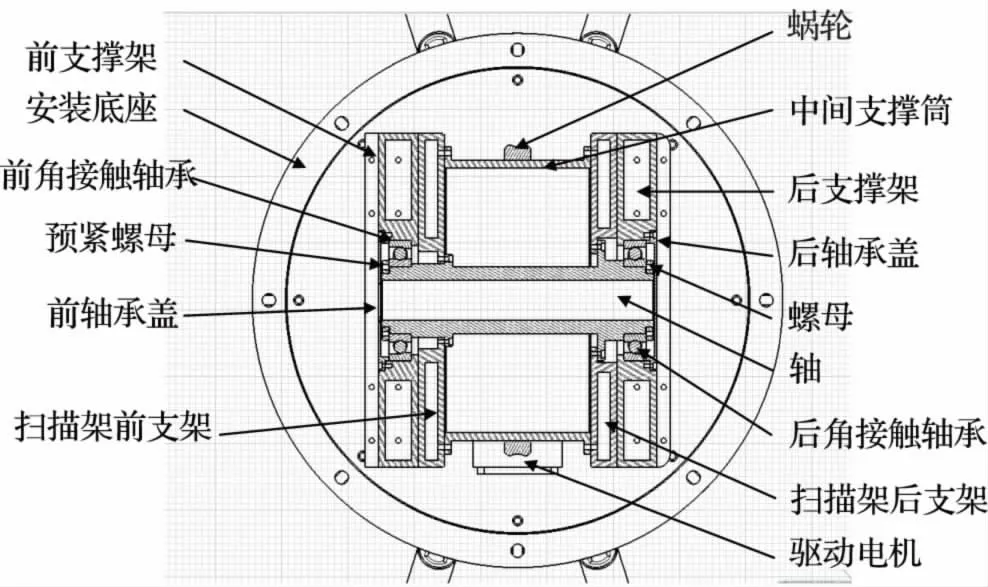
图2 转向机构结构图
1.4 扫描架机械误差分析[5-8]
按照1.2 所设计的扫描架在无补偿的情况下引入的平面度误差包括:转动机构引入的轴系偏摆误差、载荷偏心引入的形变误差、导轨直线度误差。其中由转动机构引入的轴系偏摆误差是以下几项误差的合成:
1)前角接触轴承径向偏摆误差μ1
设轴承径向跳动为0.005 mm,前后轴承的跨度l1=360 mm,则该项误差为
μ1=0.005/l1=1.39×10-5rad=2.86″
1rad=2.06×105(″)
2)后角接触轴承径向偏摆误差μ2
设轴承径向跳动为0.005 mm,前后轴承的跨度l1=360 mm,则该项误差为
μ2=0.005×2.06×10/l1=2.86″
3)转轴角接触轴承安装处同轴度误差μ3
设安装位置偏差为0.02 mm,前后轴承的跨度l1=360 mm,该项引起的误差为
μ3=0.02×2.06×105/l1=11.44″
4)前后轴承安装座轴承安装孔中心对安装连接面的不平行度μ4
设安装孔中心位置偏差0.02 mm,前后轴承的跨度l1=360 mm,该项引起的误差为
μ4=0.02×2.06×105/l1=11.44″
则转动机构轴系引入的总偏摆误差为

若转轴中心到探头喇叭在导轨两端时的距离l2=1800 mm,该项偏摆引起探头喇叭在导轨两端的最大偏移量为
u1=δ× l2/2.06×105=0.15 mm
载荷偏心引入的形变误差是指扫描部件在喇叭探头天线及电机偏心载荷作用下,会引起探头喇叭在行波方向的偏移量,经有限元计算分析,其在竖直工作状态下引起行波方向最大偏移量为
u2=0.02 mm
导轨直线度误差是指导轨本体的直线度,采用硬铝型材导轨作为扫描探头滑台的驱动定位部件,通过导轨直线度调整块可保证导轨的整体直线度优于0.10 mm,即
u3=0.10 mm
综合以上误差,引起探头在行波方向的最大偏移量为
u=u1+ u2+ u3=0.27 mm
上述分析表明,在不作补偿的情况下,扫描架平面度的偏差最大可达到0.27 mm,远不能满足紧缩场静区检测要求。
2 紧缩场扫描架平面度补偿
由以上分析可知,受到机械变形及装配加工精度的限制,紧缩场扫描面上探头的平面度不能满足测试要求,直接影响测量的幅相精度。一种有效的解决方案是,在保证一定机械精度的前提下,利用先进的激光测量技术测得探头的实际空间位置,通过软件补偿的方法对此位置误差进行补偿以修正其相位[9-11]。
平面度补偿器主要由旋转激光头和一维位置敏感探测器(PSD)组成,如图3所示。激光发射器固定在自动旋转的平台上,PSD 安装在被测物上。当激光头以一定的速度旋转时,激光器发出的激光能够扫出一个理论上的平面。激光照射在PSD 上时,PSD 便能感知到激光在PSD 上的位置,PSD 上下(如图3 箭头方向)移动后其感应值与之前感应值会产生一定的差值,此值通过电压或电流形式表现出来,经过标定,其位置移动的大小便可求出。旋转激光头固定安装,PSD 安装位置的变化即可测得。该平面度补偿器的指标如下:旋转激光器测量误差为0.012 mm/m,转速为0.5 ~10 r/s;PSD 测量误差为±0.01mm,工作范围为0.5 ~1.8 m。
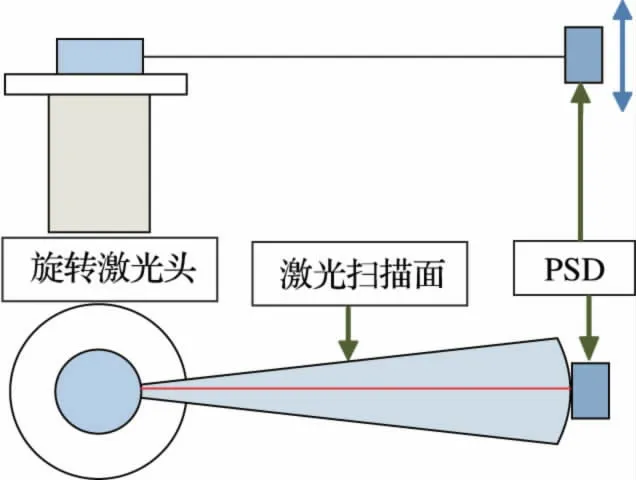
图3 自动补偿器原理图
使用时将旋转激光器安装在前支撑架端面上且与扫描架转轴同轴的位置,转轴是中空的,旋转激光器可在轴向方向调整;PSD 安装在接收天线喇叭安装座的下端面上;调整PSD 与旋转激光器的位置,使得旋转激光器发出的激光接近PSD 中点位置区域;滑台的位置由步进电机控制驱动丝杠转动的圈数控制,导轨重复性定位误差为±0.02 mm,故滑台位置可通过控制电机的脉冲数量来确定;滑台每移动一段距离便停下等待喇叭天线接收电磁波数据,与此同时采集PSD 上的数据,之后再继续移动,重复以上过程完成一个工作状态的测试。在水平位置测试完成后进行竖直状态下测试,激光器安装位置相对运动极小可忽略不计,平面度补偿器测量的平面度值即为扫描架平面度的修正值。该平面度补偿器在1.8 m 位置测量平面度的误差为0.032 mm,满足了设计要求。
3 静区测试
本试验采用单反射面紧缩场,紧缩场静区大小为2.7 m×2.7 m,工作频率范围为1 ~40 GHz。采用AgilentN5244A 一体化矢量网络矢量分析仪作为电磁波发射接收及数据处理测量设备。以一个典型的测试数据为例,该组数据是在17 GHz 水平极化下测得的,未作平面度补偿所得到的相位如图4所示,由于相位误差较大,所得到的测试结果无法对紧缩场进行评定。将相位的变化曲线(见图4 中实线)与导轨水平放置时导轨探头在行波方向的偏移量曲线(见图5)进行比较,可以看出两者的变化趋势一致,当探头位置偏移量大时,则相位误差也变大。图4 中,虚线为(理论)相位曲线。
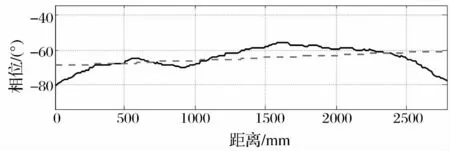
图4 竖直状态水平极化未补偿的相位数据
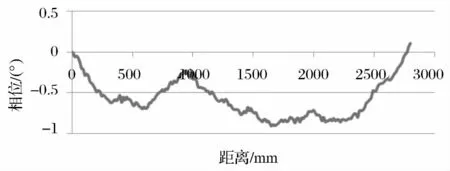
图5 导轨探头在行波(X 轴)方向的偏移量
将通过平面度补偿器测得扫描架探头在行波方向上的偏移量转换到对应波长的相位,并补偿到微波矢量分析仪中,便获得了静区补偿后的相位数据(见图6),可以看出相位误差明显减小。由此引入的相位测量误差不会影响对紧缩场性能进行评定。
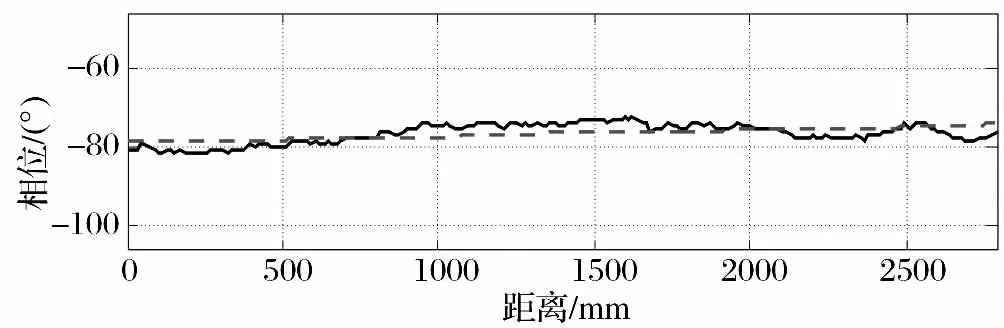
图6 竖直状态水平极化补偿后的相位图
通过本试验,验证了扫描架采用补偿方法的可行性,说明扫描架探头机械位置的平面度可适度放宽,利用先进的探测手段测得其平面度便可以进行相应补偿,从而满足紧缩场静区检测的需要。
4 结语
高精度紧缩场扫描架主要体现在微波接收头运动平面具有较高的平面度。本扫描架采用筒式支撑加斜拉杆结构,即简化了结构又减轻了重量,扫描头类采用极坐标结构,并采用平面度自动补偿器实时测量接收头原始位置的平面度,根据被测波段的频率对相位进行补偿修正。测试结果表明扫描架探头位置平面度检测误差为0.032 mm,静区测试结果表明,该扫描架能够满足最高频率为75 GHz 紧缩场静区的检测要求。
[1]全绍辉,何国瑜,徐永斌,等.大型紧缩场电气性能检测[J].微波学报,2003,19(2):77-80.
[2]何国瑜,卢才成,洪家才,等.电磁散射的计算和测量[M].北京:北京航空航天大学出版社,2006.
[3]Hartmann J,Habersack J,Steiner H-J.Antenna Measurement in Compact Ranges[M].Ahmedabad,India:ISIO,2002.
[4]John Demas,Terrance Speicher.Innovative Mechanical Designs for Scanners[C]// Antenna Measurement Techniques Association(AMTA)symposium.Carson,USA:AMTA,1996.
[5]张厚江,樊锐,陈五一.高精度紧缩场扫描架的研制[J].机械设计与制造,2005(9):111-113.
[6]胡春华,樊锐,陈五一.紧缩平面场扫描架系统研制[J].北京航空航天大学学报,2002(1):122-124.
[7]焦洪杰,张以都,黎定仕.大型紧缩场扫描架旋臂结构及动态性能分析[J].北京工商大学学报,2007,25(6):19-22.
[8]焦洪杰,陈五一,王春洁.大型紧缩场测试扫描架误差分析探讨[J].北京工商大学学报,2006,24(6):18-21.
[9]王秀春.天线近场测量系统的控制设计综述[J].现代雷达,2004,26(10):48-51.
[10]NSI.Near-Field System Inc Technical Papers[Z].2007.
[11]王秀春.激光测量技术在天线近场系统中的应用[J].现代雷达,2003,25(7):36-39.
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学杂志(2022年2期)2022-09-27
计量学报(2022年7期)2022-08-23
地理空间信息(2022年3期)2022-04-01
成都信息工程大学学报(2018年1期)2018-05-31
制造技术与机床(2017年6期)2018-01-19
制造技术与机床(2017年7期)2018-01-19
测绘工程(2017年3期)2017-12-22
重型机械(2016年1期)2016-03-01
时代农机(2015年3期)2015-11-14