
基于地球剖分的卫星成像调度研究
2014-04-07 07:45:38安丰光宋树华程承旗濮国梁
测绘通报 2014年2期
安丰光,宋树华,2,程承旗,濮国梁,李 滨,陈 东
(1.北京大学遥感与地理信息系统研究所,北京 100871;2.中国卫星资源应用中心,北京 100094)
一、引 言
成像卫星运行在一定高度的轨道上,对每个地面目标只有一定长度的成像时间窗口。为了充分利用宝贵的卫星资源,在卫星在轨运行的有限时间范围内,根据已有数据信息(卫星成像预案、卫星有效载荷性质、成像目标属性等)和确定的约束条件(载荷控制指令、侧视角、太阳高度角、云量等),合理安排有限资源(相机开关机时间、侧视次数、星载存储器容量、地面站资源等),以获取最优成像效果的地面目标影像数据。因此,需要对卫星在什么时间、使用何种角度、对哪些目标进行成像实施调度[1]。而云量是成像卫星调度的重要约束条件之一。
目前,影像数据的云量信息采用云遮蔽整个区域的百分比来描述,如遥感影像元数据标准ISO19115-2中的云量百分比(cloudcover percentage)、美国遥感信息元数据标准FGDC-STD-012-2002中的平均云量、我国地理信息共享领域元数据标准中的云斑覆盖比例等[2]。这种云量百分比的描述云量方法只从宏观层面上对其进行了描述,缺乏云的空间分布信息。因此,利用现有卫星影像中的云信息难以用于成像卫星规划调度。
为了弥补影像云量信息缺乏空间分布不足,本文提出了基于地球剖分的云区位标识编码模型,通过云区位标识编码隐含的空间区域信息,结合卫星运行轨道信息,确定成像卫星相机开关机区域,并由此确定成像卫星调度,为获取高质量的影像数据奠定基础。下面将对云区位标识编码模型和卫星成像调度原理进行阐述。
二、基于地球剖分的云区位标识编码模型
1.地球剖分模型GeoSOT及其编码模型
如何对空间目标高效地标识与编码,国内外学者进行了深入的研究。其中,基于地球剖分的空间信息高效组织与编码,如基于多级网格[3]、正多面体[4-14]、正六边形[15-17]及 Voronoi图[18],已取得了不少成果,但对目标统一的标识仍考虑较少。为此,笔者所在单位的研究团队提出了基于2n及整型一维数组的全球经纬度剖分网格[19](geographical coordinate subdividing grid with one dimension integer coding on 2n-Tree,GeoSOT),以及相应的区位标识模型。
GeoSOT网格是在地球表面经纬度空间3次扩展基础上进行严格的递归四叉剖分,由此将整个地球分割为大到全球、小到厘米级的整度、整分和整秒的层次网格体系,如图1所示。其中,第1次空间扩展是将整个地球表面扩展为 512°×512°(如图2(a)所示),面片中心与赤道和本初子午线的交点重合,然后递归四叉剖分到1°网格单元;第2次空间扩展是将 1°网格单元从 60'扩展为 64'(如图2(b)所示),然后递归四叉剖分到1'网格单元;第3次空间扩展是将1'网格单元从60″扩展为64″(如图2(c)所示),然后递归四叉剖分到1″网格单元。1″以下剖分单元直接采用四叉分割,直到(1/2048)″。这样,整个地球表面经纬度空间在经线方向和纬线方向通过严格的2分方法,将整个地球表面分割覆盖全球的多级网格体系。

图1 GeoSOT网格多级剖分示意图
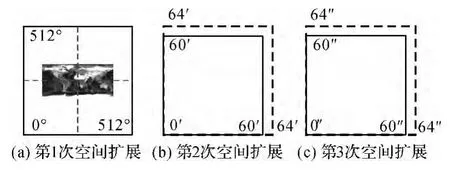
图2 GeoSOT网格3次扩展示意图
针对GeoSOT网格剖分方案,采用64位编码对每个剖分面片唯一标识。假设第k层某剖分面片编码为a0a1a2…ak,0≤k≤31,a0~ak取值范围为{0,1,2,3}。在东北半球区域 0、1、2、3 按反Z序从下到上从左至右顺序编码(如图3(a)、图3(b)所示),在西北半球、东南半球和西南半球等区域GeoSOT网格面片的编码,除a0取值不同外,其他编码与东北半球区域的编码相同且分别关于本初子午线、赤道和原点对称,如图3(c)所示。
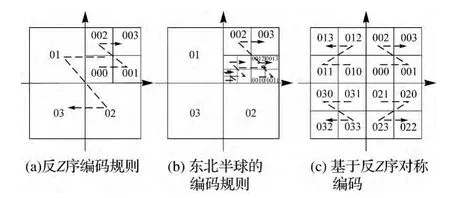
图3 GeoSOT网格单元的编码
鉴于GeoSOT网格剖分面片的空间位置确定性和编码全球唯一性的特点,基于GeoSOT网格及其编码可用于空间目标的标识与编码。
2.GeoSOT区位标识编码模型
GeoSOT区位标识编码模型采用以空间信息最小外包矩形(MBR)中左下角剖分面片为参考面片C0、以沿纬向的面片个数M和沿经向的面片个数N的聚合编码(C0,M,N)三元组;对空间目标编码,则在参考面片的基础上采用局部行列号对集合进行表示[20],如图4所示。图中左下角黑色的面片为参考面片C0,灰色实线面片为目标的边界,M、N为局部行列数,M≥1,N≥1。这样,GeoSOT区位标识编码模型具有将空间定位、尺度、范围和结构集于一体的特点。其中,空间位置和尺度由C0及对应的层级确定,范围由C0与偏移量M、N确定,空间目标的结构则由目标边界面片行列号对确定。因此,GeoSOT区位标识编码本质上以某个GeoSOT剖分层级下的面片聚合来表示空间信息的空间位置和区域范围,为空间信息的组织与管理提供一致性的区位定位和区位索引基础。
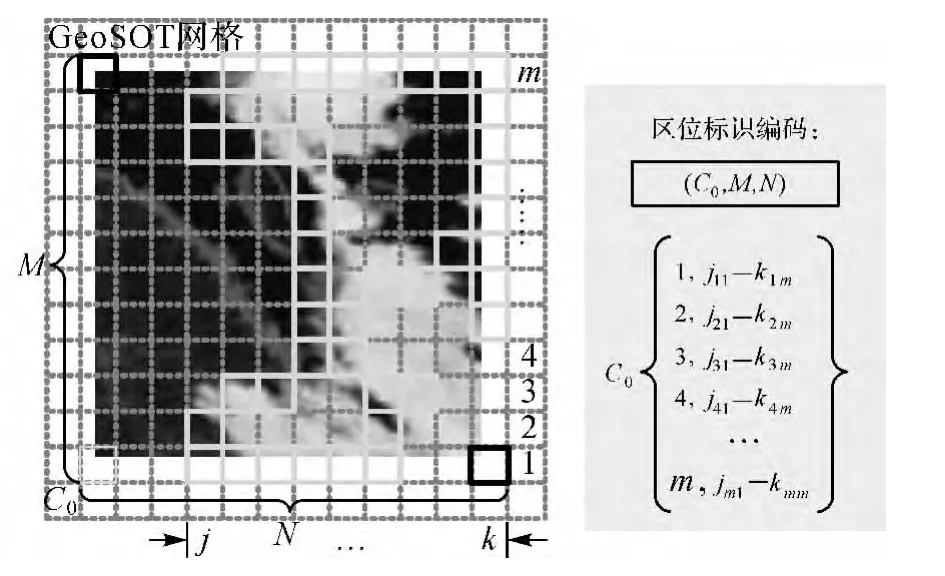
图4 GeoSOT区位标识编码模型
三、基于地球剖分的成像卫星调度原理
1.云区位标识编码
若将气象影像数据中的云视为空间目标,则影像中云也可采用GeoSOT区位标识编码进行编码。云区位标识编码步骤为:①根据影像分辨率信息确定影像数据对应于GeoSOT网格中的某级,并由影像的空间范围确定覆盖的剖分面片,从而确定(C0,M,N);②根据云的外轮廓空间位置信息,确定云覆盖的剖分面片;③ 根据与C0之间相对关系确定云的剖分区位标识编码。其中,云的轮廓信息可利用影像变化检测方式或人工交互方式获得。
基于GeoSOT的云区位标识编码在实际应用中具有如下优势。
1)影像中云覆盖的剖分面片个数与整个影像覆盖的剖分面片个数的百分比即可认为是云量百分比,因此可容易地计算出影像中云量百分比。
2)基于GeoSOT的云区位标识编码可推断出云的空间分布区域范围。
3)根据步骤2),可方便确定目标区域是否有云覆盖,有利于从海量影像数据中挑选高质量的影像;
4)根据步骤2)得到的云的空间分布区域范围,可将其作为成像卫星的云量约束条件,对成像卫星上的相机开关机进行控制,达到提高成像影像质量的目的。
2.基于地球剖分的成像卫星调度原理
由于地球剖分网格在地球表面具有确定的空间位置且剖分面片编码具有全球唯一性,因此基于GeoSOT的云区位标识编码具有空间区域性,由此得到云的空间分布和关于云信息的卫星成像调度的约束条件。基于云区位标识编码的卫星成像调度过程如下:①对覆盖范围广的气象卫星影像中的云进行GeoSOT区位标识编码,并推算云分布区域的空间范围信息;② 根据卫星的运行轨道、传感器等信息,确定卫星成像的空间区域;③ 将卫星成像区域与云分布的区域进行叠加,确定卫星拍摄的区域是否有云覆盖,从而决定相机是否开关机。如果卫星拍摄的区域有云覆盖,则可将相机关闭;否则,如果卫星拍摄的区域整体有云但监测的目标区域无云,则打开相机进行拍摄。由此,利用云的剖分区位标识编码实现了对卫星成像有效地调度(如图5所示)。
四、试验及分析
本文利用Microsoft Visual Studio 2008和C#语言作为开发平台,以2012年6月14日风云二号气象卫星云图为试验数据,对影像中云进行了区位标识编码,并对卫星相机关机区域进行了仿真试验。
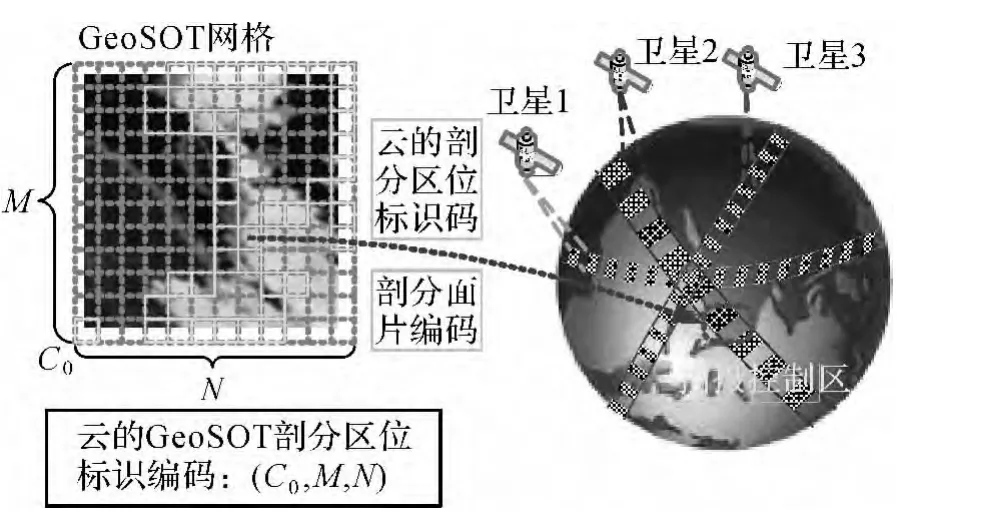
图5 基于地球剖分的成像卫星调度原理图
由于风云二号卫星云图没有空间位置,本文首先利用Google Earth获得控制点经纬度并利用Global Mapper对影像数据进行空间配准处理,处理后的卫星影像范围约为(62.99°E—147.52°E,1.24°N—63.04°N),与 GeoSOT 网格的第8层对应。影像的左下角(62.99°E,1.24°N)对应的定位面片编码为G00011111,沿纬线的剖分面片个数为32,沿经线的面片个数为 43,则影像聚合码为(00011111,32,43)。
在仿真系统中,对于影像云轮廓信息,本文采用人机交互的方式获得,其结果如图6所示中黑色多边形。根据云边界信息,确定云边界所在的剖分面片及其编码,由此可计算出基于GeoSOT的云区位标识编码(见表1)。将云区位标识包含的剖分面片的个数与整幅影像的个数相比,即可得到影像中云量百分比,其值为65%。

表1 基于GeoSOT云区位标识编码
在云区位标识编码的基础上,通过成像卫星轨道或卫星拍摄目标区域范围与云区位标识编码隐含的空间范围进行叠加分析,其相交的区域为卫星相机关机区域。在仿真系统中,成像卫星拍摄区域用一定宽度的多边形来模拟,则结合云区位标识编码,成像卫星相机关机的空间范围为图6中绿色实线剖分面片区域,具体经纬度范围见表2。
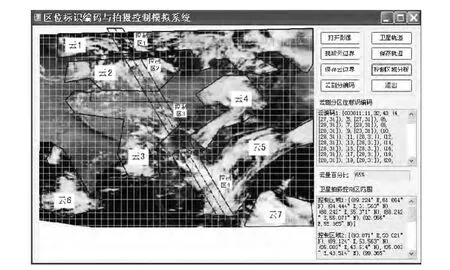
图6 风云影像云区位标识编码和卫星成像调度区域仿真结果

表2 成像卫星相机关闭空间范围
五、结束语
GeoSOT区位标识编码模型可对影像中的云进行统一编码,并对云的空间分布进行更准确的描述,有利于对影像中的云进行准确统计。同时,结合云区位标识编码中隐含的空间信息与成像卫星轨道信息,可准确地分析得到成像卫星轨道对应的哪些剖分面片有云覆盖而不适合卫星拍摄,或存在适合拍摄的局部“窗口”,以便于拍摄特定区域的信息,从而提高卫星拍摄质量。最后,通过仿真试验验证,基于GeoSOT的云区位标识编码可用于卫星成像调度。
[1] 何川东,汤航,杨斌,等。像卫星计划编制优化决策算法研究[C]∥第十一届全国遥感遥测遥控学术研讨会论文集.昆明:[s.n.],2008:360-362.
[2] 钟洪麟,施润和,曲培青,等.MODIS影像的局地云量信息元数据提取算法与应用[J].地球信息科学学报,2010,12(4):587-592.
[3] 李德仁,朱欣焰,龚健雅.从数字地图到空间信息网格——空间信息多级网格理论思考[J].武汉大学学报:信息科学版,2003,28(6):642-650.
[4] GOLAY J E.Hexagonal Parallel Pattern Transformations[J].IEEE Transactions on Computers,1969,C-18(8):733-739.
[5] CONWAY J H,SLOANE J A.Sphere Packings,Lattices and Groups[M].New York:Springer Verlag,1988.
[6] FEKETE G.Rendering and Managing Spherical Data with Sphere Quadtrees[C]∥Proceedings Visualization’90.New York:ACM,1990.
[7] FEKETE G,TREINISH L.Sphere Quadtrees:A New Data Structure to Support the Visualization of Spherically Distributed Data[C]∥Proceedings of SPIE,Extracting Meaning from Complex Data:Processing,Display,Interaction.Santa Clava,USA:[s.n.],1990:242-253.
[8] GOODCHILD M F,YANG Shiren.A Hierarchical Spatial Data Structure for Global Geographic Information Systems[J].Graphical Models and Image Processing,1992,54(1):31-44.
[9] OTOO E,ZHU Hongwen.Indexing on Spherical Surfaces Using Semi-quadcodes[R].Singapore:[s.n.],1993:509-529.
[10] GRAY R W.Exact Transformation Equations for Fuller’s World Map[J].Cartographica,1995,32(3):17-25.
[11] DUTTON G.A Hierarchical Coordinate System for Geoprocessing and Cartography[R].Berlin,Germany:Springer-Verlag,1999.
[12] DUTTON G.Encoding and Handling Geospatial Data with Hierarchical Triangular Meshes[C]∥Proceedings of7th International Symposium on Spatial Data Handling.Netherlands:[s.n.],1996.
[13] WHITE D,KIMERLING A J,SAHR K,et al.Comparing Area and Shape Distortion on Polyhedral-based Recursive Partitions of the Sphere [J].International Journal of Geographical Information Science,1998,12(8):805-827.
[14] 袁文,程承旗,马蔼乃,等.球面三角区域四叉树L空间填充曲线[J].中国科学:E 辑,2004,35(5):584-600.
[15] 贲进,童晓冲,张永生,等.球面等积网格系统生成算法与软件模型研究[J].测绘学报,2007,36(2):187-191.
[16] 张永生,贲进,童晓冲,等.基于球面六边形网格系统的空间信息处理方法[J].测绘科学技术学报,2006,23(2):110-114.
[17] 童晓冲,贲进,秦志远,等.基于全球离散网格框架的局部网格划分[J].测绘学报,2009,38(6):506-513.
[18] 赵学胜,陈军,王金庄.基于O-QTM的球面Voronoi图的生成算法[J].测绘学报,2002,31(2):157-163.
[19] 程承旗,任伏虎,濮国梁,等.空间信息剖分组织导论[M].北京:科学出版社,2012.
[20] 吕雪峰.基于GeoSOT剖分编码的空间信息区位标识研究[D].北京:北京大学,2012.
猜你喜欢
印刷工业(2020年5期)2020-03-29 06:47:00
南京大学学报(数学半年刊)(2020年1期)2020-03-19 02:24:48
中国煤炭工业(2019年5期)2019-11-04 00:53:32
智富时代(2019年4期)2019-06-01 07:35:00
赤峰学院学报·自然科学版(2018年9期)2018-10-18 07:15:52
三门峡职业技术学院学报(2017年1期)2017-06-05 10:17:29
乡村地理(2016年2期)2016-06-15 20:29:27
幸福家庭(2016年3期)2016-04-05 03:47:08
池州学院学报(2015年3期)2016-01-05 01:13:07
地震地质(2015年3期)2015-12-25 03:29:42
