
基于组合模型的原子钟时差数据修正算法
2014-04-03 01:45:22翟静董莲陆福敏张树生
计算机工程与应用 2014年9期
翟静董莲 陆福敏张树生
Zhai Jing1,2 Dong Lian2 Lu Fumin2 Zhang Shusheng1
1.中国计量学院 机电工程学院,浙江 杭州 310018
2.上海市计量测试技术研究院,上海 201203
1. College of Electrical and Mechanical Engineering China Jiliang University Hangzhou 310018;
2. Shanghai Institute of Measurement and Test Technology, Shanghai 201203
1 引言
原子钟广泛应用于守时系统或卫星导航系统中,基于完好性,这些系统均需要对原子钟进行检测,然而在原子钟运行过程中,任何测量比对系统可能会由于外界因素造成测量数据的突变,如外电系统突然断电、钟失锁或比对系统故障等,导致系统采集的数据不完全反映原子钟的性能。因此,在利用比对数据进行时间尺度的计算前必须对其进行分析,检测并修正错误或丢失的数据。目前。常用的修正方法就是考虑原子钟过去数据的变化趋势,利用二次多项式模型进行修正[1],尽管能够预报丢失的数据,但随着丢失数据点的增多,预报误差逐渐增大,预报精度降低。
本文利用灰色模型对原子钟丢失数据进行预报并修正,尽管预报的时差数据精度较二次多项式模型有所提高,但仍不理想。通过对二次多项式模型和灰色模型的预报残差分析,建立了两种组合模型来对原子钟丢失的时差数据进行修正。
2 数学模型
理想情况下,原子钟的时差模型主要由初始相位偏差、初始频率偏差和线性漂移三部分组成.在实际应用中,时间偏差 x(t)的数学模型用下式表示[2]:

其中 x0为原子钟的初始相位偏差, y0为原子钟的初始频率偏差,D为原子钟的线性漂移,为原子钟随机噪声所引起的变化量。
2.1 二次多项式模型
由式2.1知,原子钟读数T和系统时间t之间的关系可以用一个二次多项式表示[2]:

其中a0、a1和a2分别是t0时刻原子钟相对于系统时间t的钟差、钟速(频差)和半加速度(频率漂移的一半)。
设相对于时间 t1,t2,…,tn,观测误差为 e,根据式2.2可建立误差方程


根据最小二乘估计原则,记
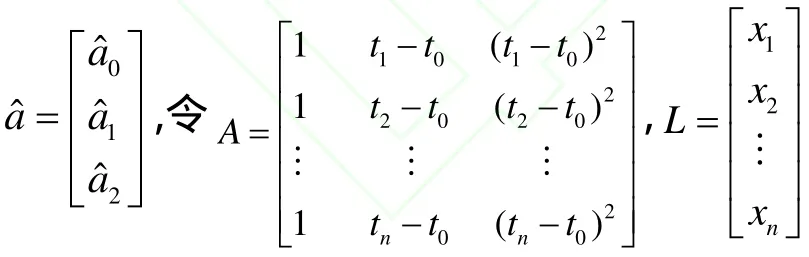
由最小二乘原理得估计值

采用二次多项式模型进行丢失数据修正,其实质是利用过去数据,通过最小二乘法拟合后的曲线预测缺失点数值,但由于仅依赖过去数据变化的特点,未考虑公式 2.1中随机误差项会造成丢失点数据的实际应测值逐渐偏离拟合曲线,使得随着丢失数据个数的增加,预测误差逐渐积累,修正精度越来越差。
2.2 GM(1,1) 灰色模型
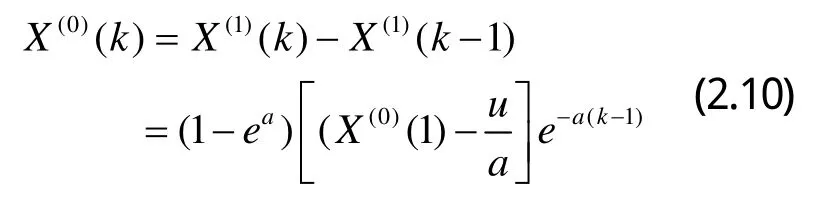
GM(1,1)灰色模型是将原子钟时差的变化过程看做一个随时间变化的灰色过程[3][4],它由只包含单变量的一阶微分方程构成,适用于对本身数据的预测[5]。


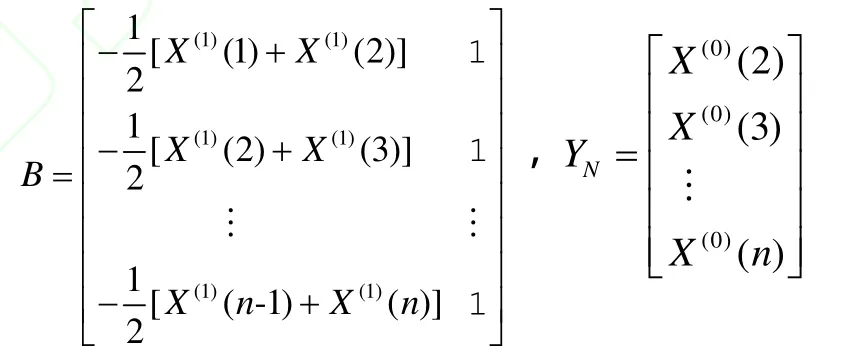
即GM(1,1)模型,其解为:

式中:k为时间序列,a为发展灰度,u为内生控制灰度。

式中:B为数据阵;YN为数据列,B和YN的表示如下:
则最终预测值如下所示
2.3 组合模型
针对二次多项式模型的缺陷,笔者提出了两种组合模型来进行时差的预报和修正,兼顾考虑了丢失点前后数据列的变化特点,减小随机误差项对丢失点数据预测的影响。
设m为丢失数据点数,2n为参与修正的实际观测数据的个数,算法流程如图1所示。设Δtˆ为丢失数据初次建模后估值,为其二次建模后预估值,为最终预报值。
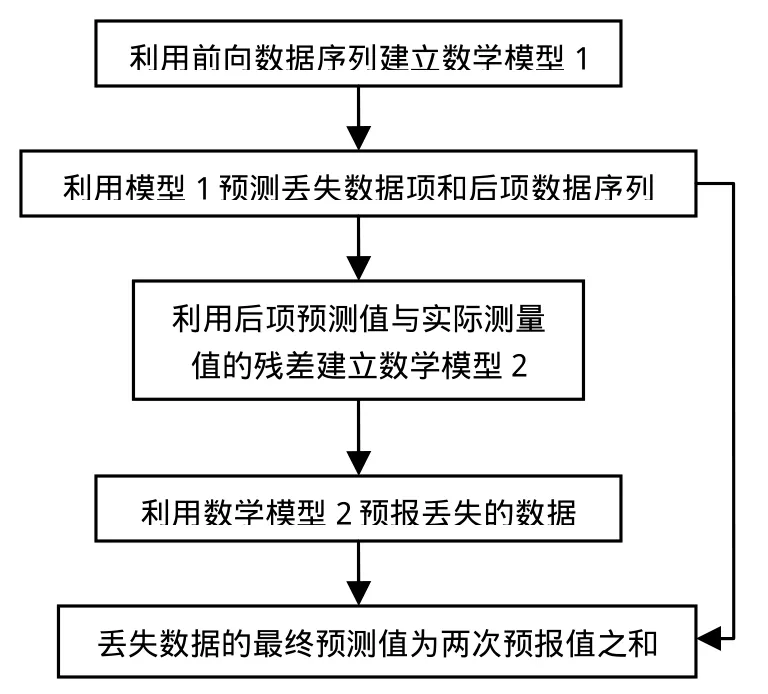
图1 组合模型算法流程
2.3.1 组合模型1
对于组合模型1,前向数据采用二次多项式模型建模,并对丢失点数据和后项数据进行预测,其中丢失点的预测值满足如下公式:

利用后项数据的预报值与其实际观测值的残差建立二次多项式模型,对丢失点数据进行预测,其预测值满足如下公式:

因此丢失点最终预测值itδ为:

式中i=n+1,n+2,…,n+m。
2.3.2 组合模型2
对于组合模型2,前向数据采用灰色模型建模,对丢失点数据和后项数据进行预测,其中丢失点的预测值满足如下公式:

利用后项数据的预报值与其实际观测值的残差建立二次多项式模型,对丢失点数据进行预测,其预测值满足如下公式:

因此丢失点最终预测值jtδ为:

式中j=n+1,n+2,…,n+m。
3 算例分析
本文采用两台铯原子钟与主钟的小时差比对数据进行分析。丢失点的前向数据和后项数据长度可根据条件设定,当数据个数较少时,进行建模的信息点较少,预测精度较差,当数据个数较多时,预测精度高,但要求对系统进行长时间的观测。为验证四种模型的优劣,前向数据和后项数据分别采用48小时的时差数据。由于在守时系统中,丢失点数据个数超过10个时(即10小时数据),此钟将不再参与地方原子时的计算[7],因此假设丢失8小时数据。
测试方案:方案1:用二次多项式模型对丢失点预测;方案2:利用灰色模型对丢失点预测;方案三:利用组合模型1对丢失点预测;方案四:利用组合模型2对丢失点预测。比较结果如表1和图2、图3所示。

表1 四种模型对丢失点预报残差的比较(单位:ns)

图2 利用四种模型预测原子钟Cs1丢失数据点

图3 利用四种模型预测原子钟Cs2丢失数据点
通过以上算例可以分析出:
(1) 如图2所示,当原子钟丢失点的前向数据上下波动性较强时,所建模型受局部波动影响较大,因此原子钟Cs1采用二次多项式模型和灰色模型都无法精准的预测丢失数据,误差较大。如图3所示,当前向数据规律性较强、波动不大时,原子钟Cs2采用二次多项式模型和灰色模型能够较好的预报丢失数据,其中灰色模型的预测精度高于二次多项式,这表明灰色模型更适合于对上下波动不大的数据建模;
(2)采用两种组合模型进行预报时,能取得较高的预报精度,优于二次多项式模型:对于Cs1而言,采用两种组合模型,其预测精度较二次多项式模型和灰度模型均提高了一个数量级,对于Cs2而言,两种组合模型的预测精度较二次多项式模型有所提高;
(3)对于两种组合模型而言,对前项数据选择何种模型需要考虑数据本身的变化特性,对变化平稳、规律性较强的数据建模时,应选择组合模型2,而当前向数据上下波动性较强时,应选择组合模型1进行丢失数据预测并修正。
4 结束语
二次多项式模型预报丢失数据具有很大的弊端,而采用灰色模型进行预报并修正时,尽管精度有一定程度的提高,但仍不理想,这主要是没能充分利用系统信息,忽视了丢失点后项时差序列的变化趋势和原子钟随机误差影响导致,而采用两种组合模型预测,兼顾考虑了丢失数据前后的时差序列变化趋势,能够取得较高的精度,因此,在原子钟数据分析中具有一定的实用性。
[1]朱亚敏.守时系统用户信号监测方法研究与软件设计[D].西安: 中国科学院国家授时中心,2010:30-36.
[2]郭海荣.导航卫星原子钟时频特性分析理论与方法研究[D].郑州:信息工程大学测绘学院,2006:92-94.
[3]路晓峰,贾小林,崔先强.灰色系统理论的优化方法及其在卫星钟差短期预报中的应用[J].测绘工程,2006,15(6):12-15.
[4]朱凌凤,唐波,李超.两种模型用于卫星钟差预报的性能分析[J].飞行器测控学报, 2007,26(3):39-43.
[5]朱凌风,吴晓平,李超,等.灰色模型在卫星钟差预报中的缺陷分析[J].宇航计测技术,2007,27(4):42-44.
[6]刘永义,党亚民,张承飞.一种组合模型在卫星钟差长期预报中的应用研究[J].测绘科学,2012,37(2):17-19.
[7]何大林.守时数据处理及其可视化实现[D]. 西安: 中国科学院国家授时中心,2010:28-31.
[8]陈正生,吕志平,张华清,等.基于时间序列分解的 GPS卫星钟差预报[J]. 测绘科学,2011,36(3):116-118.
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
小学生学习指导(低年级)(2020年3期)2020-06-02 08:50:40
中学生数理化·八年级物理人教版(2019年9期)2019-11-25 07:33:06
法律方法(2019年4期)2019-11-16 01:07:28
电子测试(2018年11期)2018-06-26 05:56:12
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
Coco薇(2017年2期)2017-04-25 17:59:38
Coco薇(2017年2期)2017-04-25 17:57:49
为了孩子(3~7岁)(2016年8期)2016-05-14 09:06:17
