
粒子滤波算法在信号源定位中的应用研究
2014-04-03 05:34
自动化仪表 2014年7期
(河北工业大学控制科学与工程学院,天津 300130)
0 引言
无线电移动监测车是无线电监测测向的主要技术装备之一,它可以行驶到固定监测站到达不了的地区,对发射信号进行测量、测向、监听等工作[1]。移动监测车由于受到周围建筑物等影响,接收到的信号通常会遇到折射和反射,在实际工作中定位结果往往误差较大,这就需要考虑引入估计方法定位来降低误差。
就优化估计方法而言,著名的Kalman滤波是之前流行的适用方法,它是一种线性最小方差估计算法,适用于线性和噪声为高斯的动态模型[2-3]。而最近流行的粒子滤波算法是适用于非线性、非高斯问题的预估新方法,一经提出就被迅速应用到目标跟踪、导航、故障检测等领域[4-5],是解决非线性、非高斯状态估计问题的最优滤波器。
本文采用粒子滤波算法对无线电干扰源的测向定位位置进行估计,通过与Kalman滤波仿真分析作对比,验证了粒子滤波算法对无线电干扰源定位精度的提高及其应用的可靠性。
1 粒子滤波算法
粒子滤波算法的基本思想是依据系统状态向量的经验条件分布,在状态空间产生一组随机样本的集合,这些样本称为粒子;然后根据量测不断调整粒子的权重和位置,通过调整后的粒子信息修正最初的经验条件分布。
假设离散非线性系统的状态方程和观测方程分别如下:
xk=fk-1xk-1+ωk
(1)
zk=hkxk+νk
(2)
式中:xk,ωk∈Rn为k时刻的状态向量和过程噪声;fk-1:Rn×Rn→Rn为状态转移函数;zk,νk∈Rm为观测向量和观测噪声向量;hk:Rm×Rm→Rm为测量函数。

1.1 贝叶斯估计
贝叶斯估计就是从所得到的观测值z1:k中推理出k时刻的状态值xk,先要求得后验概率密度函数p(xk|z1:k),从而求得k时刻的状态估计,即:
(3)
贝叶斯递推滤波一般有预测和更新两个过程。预测是利用系统模型预测从一个测量时刻到下一个时刻的后验概率密度函数,而更新是利用最新的测量值对这个后验概率密度进行修正[7]。
预测方程为:
(4)
更新方程为:
(5)
由于以上的积分项只对一些有限的模型成立,因此人们提出了用逼近算法来解决积分问题,常用的是蒙特卡洛方法。该方法能够将积分运算转化为有限样本点的求和运算。有些分布往往不能直接对其进行采样,需要借助一些采样性算法来实现目标分布的采样,实际中大多采用可实现递推估计的序贯重要性采样(sequential importance sampling,SIS)算法。
1.2 序贯重要性采样
序贯重要性采样将序贯分析方法应用到蒙特卡洛方法中,从而实现后验滤波概率密度的估计。采用蒙特卡洛方法采样时不改动过去样本的状态序列,而采用递归的形式计算权值。
假设重要性概率密度函数q(x0:k|z1:k)可以分解为:
q(x0:k|z1:k)=q(x0:k-1|z1:k-1)q(xk|x0:k-1,z1:k)
(6)
设系统状态是一个马尔可夫过程,且给定系统状态下各次观测独立,则有:
(7)
(8)
可得权值的递归形式为:
(9)
序贯重要性采样算法的具体步骤为:先从重要性概率密度函数中生成采样粒子;并随着测量值的依次到来进行递推,求得相应的权值;最终以粒子加权和的形式描述后验概率密度,从而得到状态估计[7-8]。
1.3 重采样
在序贯粒子滤波中,普遍存在的一个问题是权系数的退化问题。针对样本退化问题,目前主要通过增加粒子数目至无穷、选择好的重要分布函数和重采样等方案来解决。粒子数目的增加在许多情况下是不现实的,且会导致计算复杂度的增加。选择好的重要分布函数是比较困难的,一般采用状态转移分布p(xk|xk-1)作为重要性函数,所以重采样是目前解决样本退化的主要方法。衡量退化程度的一个恰当的尺度是有效样本数:
(10)
Neff越小,表明退化现象越严重。当Neff低于某个门限时,则进行重采样[7-8]。这样就不需要在每个时刻都进行重采样,从而能够根据样本情况决定是否进行重采样,可以在一定程度上降低计算复杂度。重采样的目的是消除权值较小的粒子。复制权值较大的粒子即增加有效样本。目前已经提出了多种重采样算法,包括系统重采样、分层重采样、残差重采样等[9]。重采样的基本思想是通过对采用粒子和相应权值表示的后验概率密度函数进行重采样,从而产生新的粒子集。本文使用系统重采样方法。该方法实现简单且使方差达到最小。
2 信号源侧向定位问题建模
定位设备是可以移动的无线电监测车,它自身的坐标可以由GPS提供。目标是静止不动的无线电干扰源信号,可通过多次改变移动监测车的位置对信号源进行测量,定位原理如图1所示。通过测量到达角度实现信号源位置的估计。

图1 定位原理图
系统状态转换模型用来描述目标状态随时间变化的过程。在定位算法中,车载是移动的,目标是静止的,所以状态模型可描述为:
Xk=Xk-1+ωk-1k=1,2,…,m
(11)
式中:Xk为目标k时刻的状态值;ωk-1为过程噪声。
观测模型与粒子k时刻的状态值有关,用来更新粒子的权值,观测模型可描述为:
(12)
式中:Zk=[θk]T为k时刻的观测数据向量;(xk,yk)为移动监测车k时刻的位置坐标;νk为k时刻的观测噪声。
3 粒子滤波定位算法实现流程
粒子滤波定位算法实现流程具体如下。
(2) 对于k=1,2,…,m,循环执行以下步骤。
(13)
② 权值计算:利用下式,由新的观测值计算各时刻样本的权值[10]。δ2为观测噪声的方差。
(14)
③ 权值归一化:利用下式对各权值进行归一化处理。
(15)

(16)
粒子滤波算法流程如图2所示。

图2 粒子滤波算法流程图
4 仿真试验分析
在Matlab平台下进行仿真试验,以移动监测车的初始位置为原点建立直角坐标系,假设被测发射源的目标为(1 400 m,600 m),系统过程噪声是均值为0、方差为1的高斯噪声,观测噪声方差为3.801 8×10-4rad2,粒子数目为500,采样时刻为60,移动监测车的运行轨迹如图3所示。

图3 车测轨迹图
参照文献[11],对静态目标的波达角(angle of arrival,AOA)算法的非线性系统做线性化近似处理后,采用卡尔曼滤波对定位和粒子滤波的性能作比较。粒子滤波和卡尔曼滤波的定位结果如图4和图5所示,表1列出了两种模型估计的误差比较。图4和图5中,星号表示对信号源X位置的估计,圆点表示对信号源Y位置的估计。
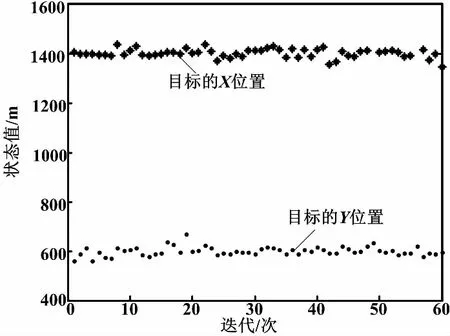
图4 粒子滤波定位结果示意图

图5 卡尔曼滤波定位结果示意图

表1 滤波误差比较
从仿真结果和误差比较可以看出,粒子滤波的预测效果及仿真误差明显优于卡尔曼滤波。这主要是因为卡尔曼滤波方法是线性高斯系统的最优滤波器。通过线性化来逼近非线性状态方程和测量方程,仍简单地采用均值和方差表征状态概率分布,未考虑误差的分布情况,这在应用上造成了状态估计精度较低。而粒子滤波算法不需要对状态变量的概率密度作过多的约束。采样贝叶斯估计算法只是随着采样粒子数的不断增大逐渐趋向状态的后验概率密度,在解决非线性非高斯系统时具有明显的优势。本文提出的粒子滤波算法实现了对干扰信号源位置的估计,提高了定位精度。
5 结束语
本文介绍了粒子滤波算法[9-11]的理论基础及其对信号干扰源定位的应用,并在Matlab环境下对无线电干扰源的定位算法进行了仿真分析和验证。结果表明,粒子滤波算法可以比较可靠地定位信号源的位置,具有一定的应用前景。
目前,粒子波滤法算法还处于理论仿真阶段,仿真环境车载运行轨迹也比较理想化。后续,该算法将被应用于国家无线电监测中心。该算法在实际应用时存在的问题,还需要进行深入的研究与改进。
[1] 何学群,石永新.无线电移动监测车的监测测向[J].中国无线电,2006(9):43-46.
[2] 杨宁,钟绍山,徐耀良,等.一种改进高斯-卡尔曼滤波的RSSI处理算法[J].自动化仪表,2013,34(7):6-8+11.
[3] 刘静,姜恒,石晓原.卡尔曼滤波在目标跟踪中的研究与应用[J].信息技术,2011,15(10):74-77.
[4] Scharcanski J,Oliveira A B,Cavalcanti P G,etal.A particle-filtering approach for vehicular tracking adaptive to occlusions[J].IEEE Transactions on Vehicular Technology,2011,60(2):381-389.
[5] 苗媛媛,陈华杰.基于粒子滤波的弱目标检测前跟踪算法[J].计算机系统应用,2013,22(1):111-115+125.
[6] Zuo J Y,Jia Y N,Gao Q X.Simplified unscented particle filter for nonlinear/non-Gaussian Bayesian estimation[J].Journal of Systems Engineering and Electronics,2013,24(3)537-544.
[7] 朱志宇.粒子滤波算法及其应用[M].北京:科学出版社,2010:20-32.
[8] 胡士强,敬忠良.粒子滤波原理及其应用[M].北京:科学出版社,2010:23-25.
[9] 代芳,张奇志,周亚丽.粒子滤波算法仿真分析[J].北京信息科技大学学报,2011,26(2):82-87.
[10]单覃,周文婷,潘磊.浅析粒子滤波算法及其参数设置的影响[J].轻工科技,2012(12):56,109.
[11]曹轶超.无线电定位算法研究及目标运动分析[D].上海:东华大学,2009.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
中国卫生统计(2020年3期)2020-06-28
统计与决策(2019年6期)2019-04-22
电子制作(2019年23期)2019-02-23
计算机测量与控制(2018年3期)2018-03-27
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
自动化学报(2017年7期)2017-04-18
