地下停车场智能化照明与停车引导系统设计
2014-04-03 02:10:18
自动化仪表 2014年4期
(陕西科技大学电气与信息工程学院,陕西 西安 710021)
0 引言
目前,地下停车场多采用传统光源,并采用全天供电的方式,能源浪费严重。同时,我国汽车的拥有量不断攀升,但地下停车场的利用率却很低。原因在于驾驶员无法第一时间获取当前空车位数量,而且进入场内只能靠场内工作人员引导或车道上的路标自行寻找空车位。基于此,本文构建了一种基于ZigBee无线网络的地下停车场智能化照明与引导系统。由于地下停车场几乎没有障碍物,不会影响ZigBee无线网络通信,因此设备移动性好。以LED取代传统光源,节能环保,寿命长,而且可有效利用LED的易调光特性,对地下停车场进行智能照明控制。当有车辆进入时,可结合给定的算法,为驾驶员选择最佳停车位,并引导驾驶员在最短时间内达到停车目的。
1 系统总体设计方案
地下停车场智能化照明与引导系统[1]主要由检测节点、LED灯具节点和协调器三部分组成。检测节点包括安装在入口处的车辆检测节点和每个停车位上方的车位检测节点;LED灯具节点安装在车道上方;协调器安装在管理室外部。这三部分构成了第一层网络,即ZigBee无线通信网络。协调器通过RS-232总线与管理室的监控中心实现通信,形成第二层网络。系统总体结构如图1所示。

图1 系统总体结构
1.1 ZigBee组网
ZigBee网络支持三种拓扑结构:星型拓扑、树型拓扑和网状拓扑。星型拓扑由协调器和终端节点组成,每个终端节点直接和协调器进行通信,但终端节点须经过协调器建立绑定关系才能进行通信。树型拓扑由一个协调器和若干类似星型拓扑的子网组成,每个子网由一个路由器节点和若干终端节点组成。路由器节点是网络信息传输的中转站。不同子网内的终端节点进行数据传输时,需先将数据传到路由进行汇总,再上传给协调器。协调器下传的数据和控制信息也要经过路由器节点进行分发。网状拓扑网络的核心是由一个协调器和若干个路由器节点组成的一个骨干网络,骨干网络内的每个节点之间都是对等的关系,可以和终端进行直接的数据通信[2]。
星型拓扑结构简单,实现起来较容易,但由于其覆盖范围有限,难以应用在大型地下停车场。网状拓扑是一种具有高稳定可靠性的网络,也具有很强的组网灵活性。数据的传输可以有很多路由路径,但网状拓扑组建较为复杂,对硬件的要求很高。在相对空旷的地下停车场中,障碍物较少,通信环境相对较好,选用树状拓扑结构,不仅保证了通信能力,而且满足地下停车场网络覆盖率广、扩展性强的要求。
1.2 系统总体功能
为满足监控设备等地下停车场的一般照明需求,在无人员和车辆的情况下,LED灯具采取亮度为全亮度10%的节能模式。灯具装有微波传感器,当感应到周围有人(车)移动信息时,可自行从节能模式变为全亮度模式。延时一段时间后,若未检测到人员和车辆移动信息,则调回节能模式。各停车位检测节点定时采集车位信息,并通过ZigBee无线网络将采集到的车位信息转发给协调器。协调器对所有车位信息进行处理后,通过RS-232上传给监控中心,监控中心根据反馈的空车位信息,对停车场内部车位分布情况进行更新、存储。当监控中心收到入口车辆检测节点发送的有车辆进入信号时,会根据改进的Dijkstra算法,为车辆选择最佳停车位及通往最佳停车位的最短路径;并通过发送控制命令,将通往最佳停车位的最短路径上的LED灯具依次变为全亮模式,以引导驾驶员在最短时间内达到停车目的。
2 系统硬件设计
协调器、LED灯具节点、检测节点的微控制器均选用TI公司的CC2530芯片。CC2530是用于IEEE 802.15.4、ZigBee和RF4CE应用的片上系统(system on chip,SOC)的解决方案,内嵌增强型8051内核并集成了RF射频收发模块。CC2530的片内外设包括调试、闪存控制器、I/O控制器、DMA控制器、定时器、ADC、随机数发生器、AES加密/解密内核、看门狗、UART等模块。利用丰富的片内外资源,用户可以进行相应的应用开发[3]。
2.1 LED灯具节点设计
LED灯具节点电路主要由控制电路和驱动电路构成,如图2所示。灯具控制电路以CC2530微控制器为核心,由电源模块、复位电路、振荡电路、Debug调试接口、射频模块、微波传感器组成[4]。
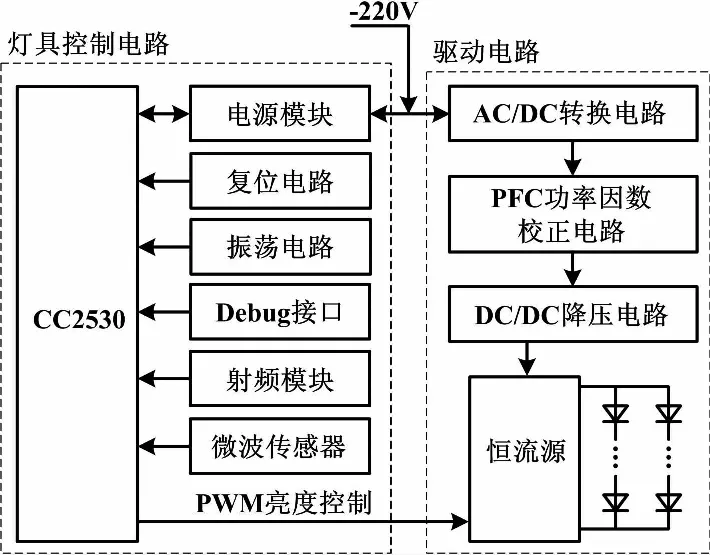
图2 LED灯具节点硬件框图
微波传感器负责对感应范围内的人员车辆移动情况进行检测。CC2530微控制器的外围模块主要包括复位电路、振荡电路及Debug调试接口。射频模块通过连接CC2530微控制器的RF-P和RF-N引脚实现ZigBee无线通信。驱动电路主要由AC/DC转换电路、PFC功率因数校正电路、DC/DC降压电路、恒流源控制电路组成,支持可变占空比的PWM数字脉冲调光方式,因此输出的恒定电流精度高,确保了LED光源亮度的一致性。当微控制器接收到微波传感器发送的人车移动信息或接收到监控中心的控制命令时,通过逐级改变PWM脉冲信号的占空比来改变恒流源的输出电流,实现LED亮度的平滑调节,达到LED智能照明或LED照明引导的目的。
2.2 检测节点和协调器设计
检测节点分为入口处车辆检测节点和车位检测节点,两个节点硬件电路唯一不同的是传感器模块。入口处车辆检测节点仅在车辆进入时对协调器发送信号。考虑到要保证对人车信号准确区分,传感器部分选用技术和应用比较成熟的地感线圈。车位检测节点安装在每个停车位上方,主要负责对车位占缺信息进行检测,因此选择超声波传感器。基于超声波原理,通过测量声波从发出、到目标物体再反射回来所需要的时间来进行传感监测,探测车位是否被车辆占用。
协调器负责整个ZigBee无线网络的建立和维护[5]。一方面接收子节点上传的数据信息,并通过RS-232模块上传给监控中心;另一方面接收监控中心的命令,并通过ZigBee无线网络将命令下达给子节点。实时时钟主要记录车辆驶入车位和离开车位的实时时间,方便停车场智能管理。存储器主要负责协调器大量数据的存储。RS-232模块则负责协调器与监控中心的通信。
检测节点和协调器硬件结构框图如图3所示。

图3 检测节点及协调器硬件框图
3 系统软件设计
3.1 Z-Stack协议栈
协调器节点、路由器节点、LED灯具节点、车位检测节点的软件设计主要是基于Z-Stack协议栈和IAR集成开发环境。Z-Stack协议栈包括物理层(PHY)、媒体访问控制层(MAC)、网络层(NWK)和应用层(APL),应用层又分为应用层框架(AF)、应用支持层(APS)和ZigBee设备对象(ZDO)。各层通过相应的数据实体服务接入点和管理实体服务接入点与其上下层进行交互。Z-Stack作为分层的模块化协议栈,每层或者每个功能都被组织为一个文件夹。其中,App为用户应用层文件,用户根据需求修改、添加应用任务;HAL为系统硬件驱动存放区;MAC主要包括库函数接口文件;MT为监控调试层目录;NWK为网络层文件;OSAL用来存放操作系统抽象文件,是系统的核心目录;Profile包括各种对AF进行处理的函数;Security主要存放安全相关的文件;Services包括地址处理的相关函数;Tools为工程配置文件夹;ZDO为ZigBee设备对象目录;ZMac主要包括系统对MAC层进行参数的配置以及对MAC层库函数的回调进行处理的函数;ZMain为主函数目录;Output为文件输出层。
3.2 应用层设计
Z-Stack由main()函数开始执行。首先进行系统的初始化,包括硬件及软件、操作系统的相关初始化。初始化完成后通过osal_start_system()启动操作系统,系统调度为一死循环,通过轮询机制查看是否有事件需要处理。与用户相关的函数主要有ZDApp_init(taskID++)和GenericApp_init(taskID)。这两个函数均被系统初始化任务函数osalinitTasks()调用。osalinitTasks()函数被操作系统初始化函数osal_init_system()调用。
系统通过配置ZDApp_init(taskID++)函数完成协调器节点、路由器节点、LED灯具节点、车位检测节点的组网;通过任务初始化函数GenericApp_init(taskID)在应用层添加相应的任务,并通过任务间的相互合作来实现系统功能[6]。
协调器作为整个系统的核心,完成的功能包括网络的初始化、组建及维护,对其他节点上传的数据进行处理,系统故障检测、节点故障检测及与监控中心的串口通信。系统将任务划分为数据处理任务、命令解析任务、数据上传任务、数据下传任务、故障检测任务。路由器节点主要负责网络中数据的转发及其子节点的故障检测,任务划分与协调器相同。检测节点主要负责数据的采集和发送,主要划分为信息采集任务、命令解析任务、数据发送任务。LED灯具节点主要通过接收控制命令对LED灯具亮度进行调节,主要划分为命令解析任务、灯具控制任务[7-8]。
3.3 监控中心软件设计
监控中心采用Visual C++和SQL Server数据库完成软件设计,主要实现的功能有:对协调器发送的各车位占用信息和各个车辆的进出时间进行实时更新和存储;当有车辆进入时,根据车位引导算法为入场车辆选择最优车位和从入口到最优车位的最短路径,再通过协调器将控制命令发送到最短路径上的各LED灯具节点。
引导算法采用了带约束条件的优化Dijkstra算法。从驾驶员角度出发[9-10],将车位到人行出口(如电梯)的步行距离及方便性、从入口到车位的距离、停车安全性作为最佳车位选择的主要因素。基本思想为:以人行出口为中心,在一定范围内搜索空车位;然后分别以人行出口和停车场入口为中心,将这些空车位距离人行出口和停车场入口的最短路径和空车位在停车
场的地理位置按照一定权值比例进行计算,选择出最佳车位。这种方法不仅减少了节点数量、计算量和运算时间,而且从驾驶员需求角度考虑,大大提高了人性化程度。
4 结束语
本文基于ZigBee无线网络,设计了一种地下停车场智能化照明和停车引导系统。系统能够有效解决地下停车场耗能严重、控制方式不合理、可靠性差、停车难、引导系统不完善等问题。系统将智能照明与停车引导融合起来,灵活性好,可靠性强,大大提高了地下停车场的停车效率,具有一定的应用价值。
[1] 陈名开.基于无线传感器网络的停车诱导系统研究[D].广州:华南理工大学,2012.
[2] 王春燕.基于ZigBee的自动照明系统在智能家居中的应用[J].自动化应用,2011(10):41-43.
[3] 凌志浩,郑丽国.ZigBee无线通信技术及其应用研究[J].华东理工大学学报,2006,7(12):35-39.
[4] 吴志辉,刘丽珏,孙世颖,等.基于ZigBee无线传感器网络的智能灯光跟随系统[J].电子设计工程,2012,20(21):119-125.
[5] 周登龙,陈硕.基于ZigBee无线通信技术的智能照明系统[J].现代电子技术,2012,35(17):192-194.
[6] 李文仲,段朝玉.ZigBee无线网络技术入门与实战[M].北京:北京航空航天大学出版社,2007.
[7] 徐勇,栾晓明,王丹.基于ZigBee技术的智能照明系统设计[J].国外电子测量技术,2010,29(1):42-45.
[8] 李智,涂亮,孙先松,等.基于ZigBee技术的智能照明系统设计[J].物联网技术,2012,29(4):29-37.
[9] 季彦婕,王炜,邓卫.停车场内部泊车行为特性分析及最优泊位选择模型[J].东南大学学报:自然科学版,2009,39(2):399-403.
[10]刘姣,葛召炎,谢静,等.停车场泊车问题的研究与仿真[J].计算机仿真,2011,28(7):340-344.
猜你喜欢
建筑与预算(2022年2期)2022-03-08 08:40:58
建筑与预算(2020年10期)2020-11-04 07:55:18
汽车画刊(2020年5期)2020-10-20 05:37:35
建筑与预算(2020年9期)2020-10-13 12:06:18
建筑与预算(2020年8期)2020-09-04 08:28:56
祝您健康·文摘版(2020年3期)2020-04-09 04:47:27
电子制作(2018年9期)2018-08-04 03:31:18
现代家长(2018年11期)2018-01-05 11:22:22
电子制作(2016年15期)2017-01-15 13:39:21
少年博览·初中版(2016年11期)2016-11-30 05:02:05