一种判断印品套准偏差的插值亚像素检测方法
2014-04-03 02:10:18
自动化仪表 2014年4期
(上海市电站自动化技术重点实验室1,上海 200072;国网上海市电力公司2,上海 200025)
0 引言
随着印刷技术水平的提高,现代印刷机正在向高效率、高精度、高质量方向发展[1]。印刷机工作时速更高,并采用更多的自动化操作与调整来满足印刷需要[2]。在这个发展过程中,快速准确地检测印刷机套准标记对提高印刷机的自动化水平和印刷质量发挥了重要的作用。
在彩色印品印制过程中,常采用Y(黄色)、M(品红色)、C(蓝色)、BL(黑色)4种颜色来印刷[2]。印刷后工作人员通过估计在印品边缘附近的套准标记偏差大小来调节套准机构,最终希望四色尽可能重合,印品清晰度达到最佳。套准精度直接影响着印刷品的视觉效果,是印刷品质量评价的重要指标[3]。因此,套准标记的检测方法是四色印刷技术的关键环节[4-5]。
1 四色印品的套准标记设计
目前,国外主要印刷机品牌多采用自动套准检测技术,如德国海德堡公司的自动套准控制系统CPC4[6],其自动套准精度为0.05 mm,但其核心技术保密。我国目前也开展了相关技术的研究,但多集中在检测装置的设计、控制方式的选择等方面,这就对我国研究高速印品在线检测系统提出了新的课题[7]。在高速印品在线检测系统的研究过程中,采用什么形式的套准标记是最基本的,也是最先需要解决的问题。
市场上常采用一种十字形线套准标记来计算套准偏差,但该套准标记在最后一个印刷单元工作完成以后,4种颜色的十字形线会重叠在一起,这会使采集的图像处理较为复杂,耗时较长。根据套准标记简单、便于快速处理的需要,本文研究主要针对一种实心圆套准标记进行分析处理。该套准标记如图1所示,标记的图形包括:2个黑色实心圆、1个黄色实心圆、1个品红色实心圆、1个蓝色实心圆。2个黑色实心圆标记图形作为套准标记的基准色标,形状为直径等于1 mm的实心圆,2个黑色实心圆标记圆心相距30 mm;其他色标均为直径等于1 mm的实心圆,色标圆心间距为5 mm。

图1 套准标记示意图
印刷机一启动,在印刷品上首先印出套准标记图案,然后通过工业摄像头获取套准标记图形,通过图形处理算法计算出各实心圆标记图形圆心。分别判断各实心圆标记图形圆心横轴坐标、纵轴坐标之间的间隔。如果实际间隔在预定的范围之内,说明套印准确;如果实际间隔超过了预定的范围(一般为0.10 mm[8-9]),则说明套印出现偏差,将该套印偏差信号反馈给伺服机构,以作出相应调整。
2 四色印品套准标记偏差检测方法
2.1 去除干扰图像
通常,在印刷品上印刷套准标记图案的过程中,由于抖动等因素造成的一些干扰图像如图2所示。

图2 套准标记干扰图像示意图
为了便于后续插值亚像素法对边缘进行提取,首先需要去除这些干扰图像。以黑色图像为例,采用的去除方法步骤如下。
① 对图像按照从左向右、从上往下的顺序进行逐个像素扫描。
② 判断扫描到的像素点是否为黑点,如果是,则执行下面的进一步判断,否则跳转回步骤①。
③ 按优先级依次降低判断顺序,分别对当前像素点的右上、正上、左上及左前点判断连通性。其中,右上点的优先级最高,左前点的优先级最低。
④ 若右上点与左前点(或左上点)标记值不相同,则置当前点为与右上点相同的值。然后从头到尾扫描图像,把所有跟左前点(或左上点)标记相同的像素点置为与右上点相同的标记值。
⑤ 若当前像素点的正上点为黑点且不属于步骤④中描述的情况,即当前点与其正上点属于同一区域且其邻域不存在多种区域标记的可能性,则将当前点与其正上点作同一标记,并置当前点为与正上点相同的值。
⑥ 若当前像素点的左上点为黑点,且不属于步骤⑤中描述的情况,即当前点与其左上点属于同一区域,且其邻域不存在多种区域标记的可能性,则将当前点与其左上点作同一标记,并置当前点为与左上点相同的值。
⑦ 若当前像素点的左前点为黑点,且不属于步骤⑥中描述的情况,则当前点与其左前点属于同一区域,所以将当前点与其左前点作同一标记,并置当前点为与左前点相同的值。
⑧ 若当前像素点的右上、正上、左上及左前共4个像素点均为白点,表示该点与这4个像素点不连通,那么可认定此点是一个新区域中的点。这时将区域数加1,并置该点为黑色点,即该点RGB值为(0,0,0)。
⑨ 通过前面8个步骤,可以将标记图像中相同颜色的图案进行分块,得到分块后每块图案的像素点总数。当分块后某一图案的像素点总数大于设定值时,则该图案为所需要的套准标记图案,其余图案全部置为白色,即RGB值置为(255,255,255)。
2.2 套准标记边缘提取
在提取各套准标记图像边缘时,可以通过编码器等机械机构将套准标记图像限定在一定的搜索范围内,以减小图像处理区域。
边缘提取的实质是通过一些算法来提取图像中灰度不连续的边缘像素。为了提高边缘的检测精度,从 20世纪70年代起,就有不少专家提出了一些有效的亚像素方法,使图像的边缘定位达到亚像素级[10]。常用的亚像素方法有最小二乘法、空间矩法和插值法[11]。最小二乘法、空间矩法有很高的定位精度,但计算时间较长。插值算法计算时间相对较短,采用改进的样条插值法后,可以有效提高检测速度。
插值法亚像素边缘检测的理论依据是:像素边缘特征点处于光强函数斜率最大的地方。用插值函数近似恢复像边缘过渡区的一维连续光强函数,再根据亚像素边缘检测的理论,求出像素边缘特征点的坐标。
改进样条插值函数S(w)的表达式为:
(1)
式中:w为样条节点。
二维空间的样条插值用矩阵表示,即:
F(m,n)=ABC
(2)
(3)
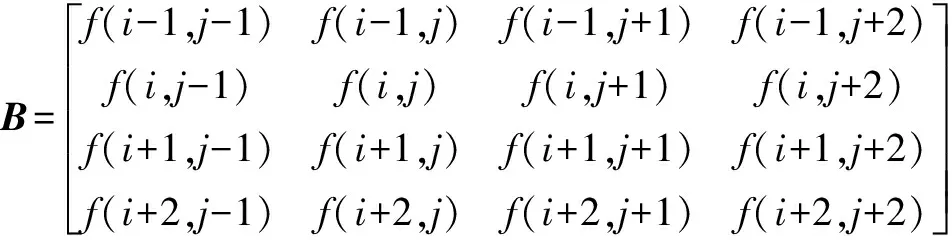
式中:F(m,n)为插值后的图像;f(i,j)为输入的插值前像素点;u=m-[m],v=n-[n],其中,[·]表示取整。
通过改进样条插值亚像素法对标记图像进行处理后,可以得到清晰连续的边缘图像。该边缘图像定位精度为0.3左右像素级,且提取速度快,确保后续偏差计算的准确性与高效性。
2.3 套准标记偏差计算
套准标记边缘提取后,通过每种颜色标记边缘坐标计算出对应颜色标记的圆心坐标,再通过圆心坐标分别计算出每种颜色实心圆标记圆心坐标相对于基准黑色圆心坐标横轴、纵轴的偏差。将该偏差与标准图像间隔进行比较,即可判断该次印刷是否准确,若不准确,可将该套印偏差信号反馈给伺服机构做出相应调整。计算圆心坐标横轴、纵轴偏差的方法如下。
设过两黑色实心圆标记圆心坐标的直线方程为:
y=kx+b
(4)
将黑色实心圆标记圆心坐标值代入式(4),可得:
(5)
式中:(xbl1,ybl1)和(xbl2,ybl2)分别为黑色标记1与黑色标记2的圆心坐标。

3 试验测试和结果
3.1 试验测试
本文检测方法是利用C#语言在 VS2005平台上编写程序,用该软件程序在开发的套准检测实验平台系统上进行试验。检测平台系统结构框图如图3所示。

图3 套准检测平台系统结构框图
针对印刷机多色套准的需求,开发了用于高速机器视觉套色检测的实验平台。实验平台包含高速以太网CCD摄像头、机器视觉光源、光电传感器、I/O卡、编码器信号逻辑处理模块、计算机、调速皮带等。
实际的套准检测平台系统包括照明光源、位置传感器、镜头、工业相机、PC机、警报及剔除等装置。实际生产线套准标记图像和采用本文方法得到的套准标记边缘检测结果如图4所示。
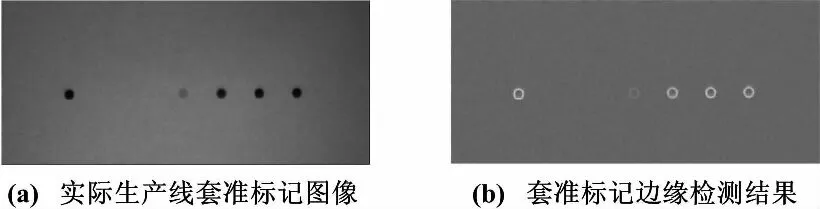
图4 采集的试验套准标记图像
由图4可以看出,采用本文偏差检测方法,不仅能有效去除套准标记图像边缘周围的干扰图像与微小噪声,移除的图像精度可达到1个像素点,而且使检测出的边缘图像比较连续,减少了边缘中的断点,使得套准标记图像的边缘清晰可见。同时,该方法能够确保检查的实时性和精确性。如对一幅大小为1 000×450像素的图像进行检测,检测时间低于40 ms,速度最大能够达到每秒25帧图像。
3.2 偏差定位精度与检测时间测试
采用本文检测方法、空间矩法、质心法、Canny算子检测方法对实际生产线套准标记图像进行检测。为了保证测试的公平性,将每个算法迭代测试50次取平均值。实际测试结果如表1所示。
从表1可以看出,求取质心参数的检测方法检测速度快,但定位精度低,抗噪能力弱。空间矩法定位精度高且抗噪能力好,但检测速度过慢。Canny算子检测方法定位精度与检测速度均不理想。本文的检测方法检测迅速,定位精度较高,能较好地顾及高速印品套准标记所需要的运行速度与定位精度,具有较高的实用性。
4 结束语
本文基于插值亚像素技术,采用改进区域分块算
法去除套准标记的干扰图像,然后采用改进样条插值亚像素算法提取标记边缘,再通过边缘参数来计算出每种颜色标记的圆心参数及对应的套准标记偏差。
试验证明,将该机器视觉方法应用于四色印品的套准标记检测过程中,能有效地提高检测速度与定位精度,而且在有噪声干扰的情况下,该算法也能较快速、精确地实现偏差检测,优于传统的偏差检测方法。
[1] 黎妹红,杜晔,刘吉强.一种用于卷筒纸印刷的智能套准系统[J].计算机工程,2011(22):287-289.
[2] 于丽杰,李德胜.彩色印刷套准识别方法研究[J].计算机工程与应用,2011(5):163-165,171.
[3] 李俊锋,唐正宁.印刷十字线套准检测算法的研究[J].计算机工程与应用,2012(28):174-177.
[4] 石绘,余文勇.图像传感型印刷套色控制方法的研究[J].计算机工程与应用,2011(4):242-244.
[5] 黄亚男.套准机构在印刷中的调节与使用[J].印刷世界,2012(5):33-34.
[6] Dworkni S B,Nye T J.Image processing for machine vision measurement of hot formed parts[J].Materials Processing Technology,2006,174(1-3):1-6.
[7] 李传伟,陈广华.基于色标点印报机自动套准系统设计[J].国外电子测量技术,2006(7):11-13.
[8] 姚峰林,詹海英.机器视觉中的边缘检测技术研究[J].机械工程与自动化,2005(1):108-110.
[9] Rakun J,Zazula D.Optimization of image registration for print quality control systems[C]//Systems,Signals and Image Processing,2007 and 6th EURASIP Conference Focused on Speech and Image Processing,Multimedia Communications and Services,14th International Workshop on,Maribor,2007:454-458.
[10]Cox I J,Kruskal J B,Wallach D A.Predicting and estimating the accuracy of a subpixel registration algorithm[J].Pattern Analysis and Machine Intelligence,IEEE Transactions on,1990,12(8):721-734.
[11]Yang Ou,Guo Baoping,Hu Tao,et al.A real-time vision system for defect detection in printed matter and its key technologies[C]//Industrial Electronics and Applications,ICIEA 2007,2nd IEEE Conference on,2007:2157-2161.
猜你喜欢
福建中学数学(2023年5期)2024-01-25 17:41:36
橡塑技术与装备(2018年17期)2018-09-01 06:59:24
中等数学(2018年1期)2018-08-01 06:41:04
江西建材(2018年4期)2018-04-10 12:36:52
电脑知识与技术(2018年35期)2018-02-27 13:29:44
自动化学报(2017年11期)2017-04-04 02:52:44
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01 04:06:28
橡胶工业(2015年8期)2015-07-29 09:22:40
电视技术(2014年11期)2014-12-02 02:43:28
数学大世界·初中生辅导版(2010年2期)2010-03-08 01:47:46