
自适应智能光电循迹系统的设计与实现
2014-04-03 02:04
自动化仪表 2014年3期
(河北工程大学信息与电气工程学院,河北 邯郸 056038)
0 引言
随着自动化技术和控制技术的发展,智能设备的研究和应用将会对人类社会产生深远的影响。近年来,智能机器人在工业生产和日常生活中发挥着重要的作用,因此,智能设备也成为了人工智能领域研究的热点[1-2]。本文设计实现的自适应智能循迹系统能够使智能机器人在给定的具有多种背景色的区域内沿着白色引导线稳定行进,通过及时调整机器人的前进方向和行进速度,有效消除行进过程中产生的累积误差,引导机器人准确、快速地到达目的地。
1 系统基本原理及总体设计
本文设计的循迹系统采用传感器探测法,即通过传感器输出的电压高低来区别引导线和背景色。当输出电压为高电平时,为背景色;反之,则为白色引导线[3]。同时,利用光电旋转编码器采集车速信息并发送给主控制器。主控制器通过分时扫描的方法提取传感器采集到的路径信息,并接收车速信息,经过各种算法综合处理,得到当前智能机器人和引导线的相对位置信息,并采用模糊控制算法和PID控制算法对驱动电机和转向舵机进行控制,从而实现智能机器人的自主循迹[4]。系统组成结构如图1所示。

图1 循迹系统组成结构图
2 系统硬件设计
2.1 路径识别模块
系统中用于路径信息采集的传感器是一种反射式光电传感器,其工作原理图如图2所示。
在传感器中,解调电路内部实际是一个施密特触发器,只有当接收到的反射光强大于一定门限值时,解调管的信号端才会产生一个低电平。设计中使用单片机调制PWM信号替代调制管对发光二极管D2进行调制,可以通过软件程序来调节PWM信号的占空比。此外,在选择光源颜色时,发现紫色光束不仅具有较高的反光率,而且在实际环境中应用较少,能够提高系统的抗干扰性。

图2 反射式光电传感器原理图
在制作电路板时,将16个传感器按照“一”字型非均匀地分布在条形电路板上。选取智能机器人的几何中心为定点O,并依次等角度画射线,射线与电路板水平线相交的位置即为各传感器的位置。在该系统中,智能机器人长度为30 cm,传感器所在的电路板长度为22 cm,探出距离为10 cm。系统位置参数图如图3所示。
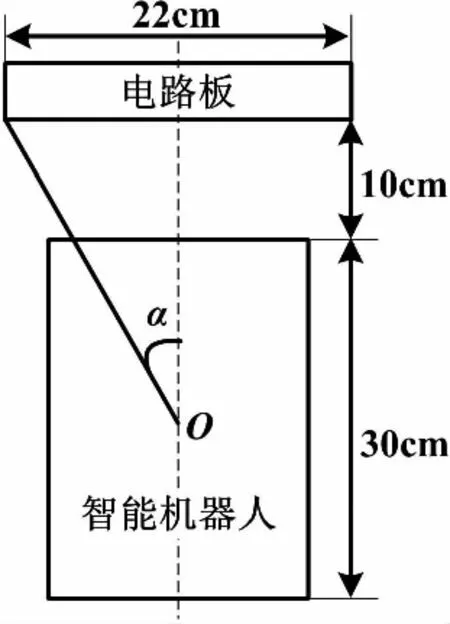
图3 系统位置参数示意图
由图3可知,检测到的最大偏角为:
(1)
将16个光电传感器从左到右的序号分别记为(-8,-7,-6,-5,-4,-3,-2,-1,1,2,3,4,5,6,7,8),则每个光电传感器到智能机器人中轴线的距离为:
(2)
通过计算,得到各个光电传感器的排列位置表如表1所示。

表1 光电传感器排列位置表
在扫描传感器的状态信息时,为了防止相邻传感器之间互相影响,采用双3~8译码器实现分时扫描控制,在提高扫描速度的同时节约ATmega16L单片机的CPU引脚。将两个74LS138译码器的E3端口用单片机控制,分别与单片机的PA1、PA2端口相连,既可以分开扫描,又可以并行扫描,在增加设计灵活性的同时,也便于调试和检错。
2.2 车速检测模块
为了对检测到的车速进行PID控制,车速检测模块采用松野电气生产的SY-ES40-RB360型光电旋转编码器来采集车速信息,其理论依据是编码器输出的脉冲个数与电机的转动速度成正比。该编码器不仅硬件电路简单,而且信号采集速度快、精度高、分辨率为360脉冲/转。因此,根据一定时间内光电旋转编码器输出的脉冲数能计算出车速,具体公式如下:
(3)
式中:V为当前的车速;D为车轮直径;N为采样时间内编码器所输出的脉冲数;T为采样周期。
2.3 主控制器模块
主控制器是循迹系统的核心部分,负责完成传感器转换电路信号的接收、路径和车速信息的处理以及智能机器人运动速度、方向的控制等功能[5]。本设计选用的ATmega16L微控制器的I/O口具体分配为:PA1、PA2分别为双译码器的使能端有效信号的输出,PB0~PB2、PB4~PB6用于控制3~8译码器U1、U2的输入端信号,通过这8个I/O口即可实现对16路光电传感器的扫描控制;PA0用于车速检测的输入口;PB3用于舵机的PWM控制信号输出;PD4和PD5用于驱动电机的PWM控制信号输出,可分别连在电机驱动模块的使能端EN1和EN2,PD1、PD0、PD6和PD7分别与电机驱动模块的IN1、IN2、IN3、IN4相连。
2.4 电机控制模块
智能机器人的电机系统包括驱动电机和转向舵机。该系统的驱动电机选用直流电机,并采用L293D作为驱动芯片。L293D可同时驱动两个电机,其中3、6脚和11、14 脚之间分别接1个电机,2、7、10、15脚接输入控制电平以控制电机的正反转,EN1、EN2端接控制使能端以控制电机的停转。主控制器输出两组PWM波分别控制两个电机的速度。由于电机的转速与供给电机的电压成正比,而电机的电压与PWM控制波形的占空比成正比,因此电机的转速与PWM占空比成正比[6-7]。
L293D的引脚示意图如图4所示。

图4 L293D的引脚示意图
循迹系统选取HS- 425BB 型舵机作为转向控制元件,以单片机的PB3作为PWM信号输出端,采用PWM 信号开环控制可以满足PWM 信号与角度相对应的要求,控制电路简单且能满足控制要求。
2.5 电源稳压模块和通信模块
循迹系统各模块所需的电压和电流容量不同,因此电源稳压模块应包含多个稳压电路:①LM2596为5 V电压的稳压芯片,将电压供给主控制器ATmega16L单片机、路径识别模块以及车速检测模块;②LM338为6 V 电压的稳压芯片,将电压供给转向舵机控制模块;③将电源电压12 V 直接用于驱动电机。此外,系统选用了上海桑锐电子科技有限公司的SRWF-1型微功率无线通信模块。该模块提供多种接口方式,可满足ATmega16L的使用需求,便于在运动状态下实现参数的实时发送。
3 系统软件设计
3.1 软件流程设计
系统软件程序包含有模块初始化、工作状态判断、自适应学习、路径扫描、车速检测、滤波算法等模块的设计,其流程图如图5所示。

图5 软件程序流程图
3.2 自适应学习思想的应用
在该循迹系统中,应用自适应学习思想的目的是使每路传感器仅对白色敏感而对背景色不敏感。传感器对PWM占空比的敏感度曲线如图6所示。图6中,A′、E′和B′、D′分别为传感器能够检测到白色和背景色的临界占空比,C′为使传感器对白色、背景色的敏感度达到最高的理论值。

图6 敏感度曲线图
从图6可以看出,在理论最高点C′两侧都存在可以作为自适应的部分,为了提高发光二极管的发光亮度,选取D′~E′部分作为自适应部分。当进行白色自适应学习时,通过程序控制使PWM[5-6]的占空比从99%向下递减直到检测到的状态为低电平,此时占空比就是检测到白色引导线的临界值占空比E′并保存到相应数组。背景色自适应过程类似,但是由于解调管在C′两侧对背景色都很敏感,而且每个解调管的特性也不完全一样。C′只是一个理论参考值,因此在实际测试过程中找到D′的有效方法就是将PWM占空比从1%开始递增直到恰好能够检测到背景色;之后继续增加占空比直到再次检测不到背景色,此时的临界占空比即为D′。将E′和D′求均值就能得到对白色敏感但是对背景色不敏感的占空比,而且排除了临界点波动带来的干扰。
3.3 舵机转向控制策略
系统采用双P控制来实现对舵机的转向控制。智能机器人与引导线位置关系可以由位置偏差d方向偏差α来描述,因此,将参数d和α作为双P控制算法的输入量。同时,对智能机器人转向的控制是通过对舵机转角的控制来实现的,而舵机转角的控制则是通过改变PWM的占空比来实现的,因此双P控制算法的输出量为PWM的占空比。舵机转角与PWM计数值的对应关系如图7所示。

图7 舵机转角与PWM计数值的对应关系图
当某个传感器检测到白色引导线时,根据表1,就能得出d值,通过以下几个公式,即可得到α值和PWM的计数值。
(4)
(5)
Ang=A1×α+A2×d
(6)
PWM=750+(Ang×50/9)
(7)
式中:Ang为舵机的当前转角值;A1和A2为角度偏差和位置偏差的系数。
根据PID调节规律,可以通过测试确定A1和A2。
3.4 电机速度控制策略
利用上述转角信息,建立一个双输入单输出的模糊控制器,实现对驱动电机转速的控制。双输入为机器人转角值Ang和转角增量值Ang-a,单输出为PWM占空比pwm-d,建立的模糊控制规则如表2所示。

表2 PWM占空比模糊控制规则表
在表2的基础上,对测得的速度用闭环PID控制算法进行调整,保证机器人的速度在各种负载和供电变化的情况下平稳、快速地达到预定速度。电机控制系统原理图如图8所示。

图8 电机控制系统原理图
采用的PID控制器为:
(8)
式中:e(n)为系统的设定速度与测速传感器测得的当前速度之差,设定速度可通过查询模糊控制规则表得到,当前速度由光电旋转编码器检测得到;u(n)为当前电机电压的控制量,它以PWM信号的方式控制直流电机转速;KP、KI和KD分别为比例系数、积分系数和微分系数,三者都可以通过试验方式确定。
4 系统功能测试
功能测试的场地图如图9所示。
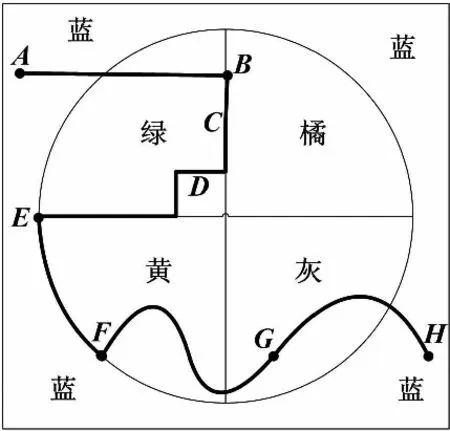
图9 功能测试场地图
实测表明,循迹系统在工作时对外部光强很敏感。因此,将不同测试环境的光照强度进行测量,并分别进行功能测试,得到的测试结果如表3所示。

表3 光线强度与循迹功能关系表
为了提高系统的环境适应性,循迹系统需要安装遮光装置。考虑到测试场地以及实际使用环境的地面状况,循迹系统在上坡、下坡时都有遮光需求。因此,遮光装置应该使用材质较软的不透光材料。通过测试表明,不同材料的遮光装置具有不同的遮光效果,对循迹系统的循迹精度有不同的影响,本文仅对黑色的软塑料纸、棉布、薄海绵三种材质的遮光装置的遮光效果进行对比研究,结果如表4所示。

表4 遮光装置对循迹系统循迹功能的影响
从表4可以看出,安装有遮光装置的循迹系统的循迹偏差明显变小,其中薄海绵的遮光效果最好,而且能够变形,满足在不同坡度地面上的遮光需求。
设定测试路径为A→B→C→D→E→F→G→H,测试结果表明,该循迹系统能够在具有多种不同颜色的环境背景下从起始点准确到达目的地,而且在各段路径上的循迹精度都在±2 mm内。通过多次测试(N≥100),得到各个线段上的循迹偏差统计结果如表5所示。

表5 不同类型引导线上的循迹偏差对比
测试表明,安装有遮光装置的循迹系统具有良好的循迹效果,能够有效排除周围环境光强的干扰,在不同坡度的地面上准确循迹。
5 结束语
本文所设计与实现的自适应智能循迹系统不仅创新性地应用了自适应思想,使得智能机器人能够适应不同的背景色。路径信息采集模块有效利用双译码器,实现分时扫描,提高扫描速度。安装的遮光装置有效排除了周围环境光线强度带来的干扰。实测表明,该循迹系统具有很高的实用价值,能够适应不同坡度、不同背景色的地面环境。系统采取了多种防干扰措施,循迹精度高、扫描速度快,可广泛应用于各种智能设备。
[1] 李波,杨卫,张文栋,等.一种智能小车自主寻/循迹系统设计[J].计算机测量与控制,2012,20(10):2798-2801.
[2] 宁慧英.基于光电传感器的智能小车自动寻迹控制系统[J].仪表技术与传感器,2012,1(1):108-110.
[3] 吕霞付,罗萍.基于光电传感器的智能车自动寻迹系统设计[J].压电与声光,2011,33(6):939-942.
[4] 李新科,高潮,郭永彩,等.基于语音识别和红外光电传感器的自循迹智能小车设计[J].传感器与微系统,2011,30(12):105-108.
[5] 宋永献,马娟丽,贺乃宝,等.基于TMS320F2812的智能循迹小车控制系统设计[J].计算机测量与控制,2011,19(9):2128-2130.
[6] 陈秀霞,卢刚,李声晋,等.轮式机器人用无刷直流电机控制系统设计[J].测控技术,2010,29(5):55-59.
[7] 庹朝永.基于单片机的直流电机PWM调速系统设计与开发[J].煤炭技术,2011,30(6):62-63.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
自动化学报(2019年6期)2019-07-23
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
装备制造技术(2018年8期)2018-10-17
电子制作(2018年1期)2018-04-04
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
电子制作(2017年1期)2017-05-17
制造业自动化(2017年2期)2017-03-20
汽车维护与修理(2015年5期)2015-02-28
