隔振器动力学参数的测试方法研究
2014-04-02 07:13赵寿根吴大方
振动工程学报 2014年6期
王 杰, 赵寿根, 吴大方, 罗 敏
(1.北京航空航天大学航空科学与工程学院, 北京 100191; 2.中国空间技术研究院,北京 100086)
引 言
近年来,国内外航天技术取得了快速的发展,航天器种类和功能日趋多样化,结构形式日趋复杂。目前,以高分辨率遥感卫星为代表的高精度航天器是研究热点之一,其具有严格的定位指向精度和分辨率要求,如美国最近发射的KH-13 侦查卫星地面分辨率高达0.05 m,这使得航天器各扰动部件传递到光学有效载荷的振动量级需衰减到微米甚至纳米量级,从而使得该类型的振动控制具有非常大的挑战性[1,2]。常用的振动控制方法有吸振、隔振和阻尼减振,为了使得动量轮、CMG的低频姿态控制力矩传递到航天器本体结构上而衰减其高频扰动,隔振是较为适合的一种方法。
从上世纪90年代初美国第一次将三参数微振动隔振器应用到哈勃望远镜以来,微振动隔振技术已经发展了20多年,隔振类型也从单一的被动隔振发展为主被动一体化的新技术[3~8]。其中以霍尼韦尔公司的Davis等人为代表发展了多种高性能的微振动隔振器,分析了其内在的隔振机理,给出了阻尼系数和刚度系数的试验机械阻抗曲线拟合获取方法,该方法能得出单一的阻尼、刚度数值,拟合误差较大,没有考虑粘性流体的阻尼、刚度系数随频率的变化规律及其对隔振性能的影响[9~11]。阻尼系数传统的测试方法有半功率带宽法、自由衰减法等[12,13],这些方法的前提假设均为小阻尼,因此并不适合测试大阻尼隔振器的阻尼系数。常用的阻尼系数测试设备有万能材料试验机、凸轮试验系统和高频疲劳试验机等,由于微振动隔振器的振幅为微纳米量级,上述测试方法和测试设备也很难满足精度要求。此外,大多数的微振动隔振器均为多参数模型,内含多个结构组件,因而很难直接测量得到内部组件的阻尼系数,从而给隔振器的设计、测试和性能优化增加了难度。
为解决上述难题,本文采用机械阻抗等效的方法,将多参数模型简化为等效两参数模型,并设计了相应的测试平台,采用迟滞环法测试等效两参数模型的动力学参数,进而反推出多参数模型中的刚度和阻尼系数。在试验得到各组件动力学参数的基础上,建立测试对象的Simulink仿真模型,将测试结果与仿真结果进行比对,以验证本文方法的有效性。
1 机械阻抗等效理论
1.1 五参数模型
如图1所示为一种航天器流体微振动隔振器的五参数模型,其包含刚度系数k1,k2,k3,k4和阻尼系数c。其中刚度系数k4与阻尼系数c串联,然后与刚度系数k3并联,组成一个三参数模型块,其整体与刚度系数k2串联,然后与刚度系数k1并联。三参数模型块代表样机的内芯,k2代表样机的内筒刚度,k1代表样机的外筒刚度。阻尼系数c主要由内芯油腔内的硅油因受挤压作用通过小孔,进而产生剪切效应耗散能量而产生,由于流体具有可压缩性,在流动过程中将同时产生与阻尼系数c串联的体积刚度k4。因隔振器的质量较小,故在计算时可忽略其质量,如图2所示。
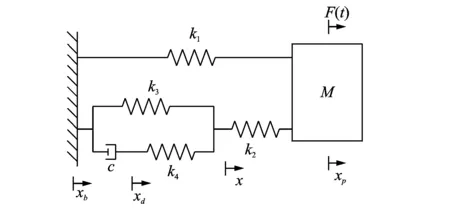
图1 五参数模型
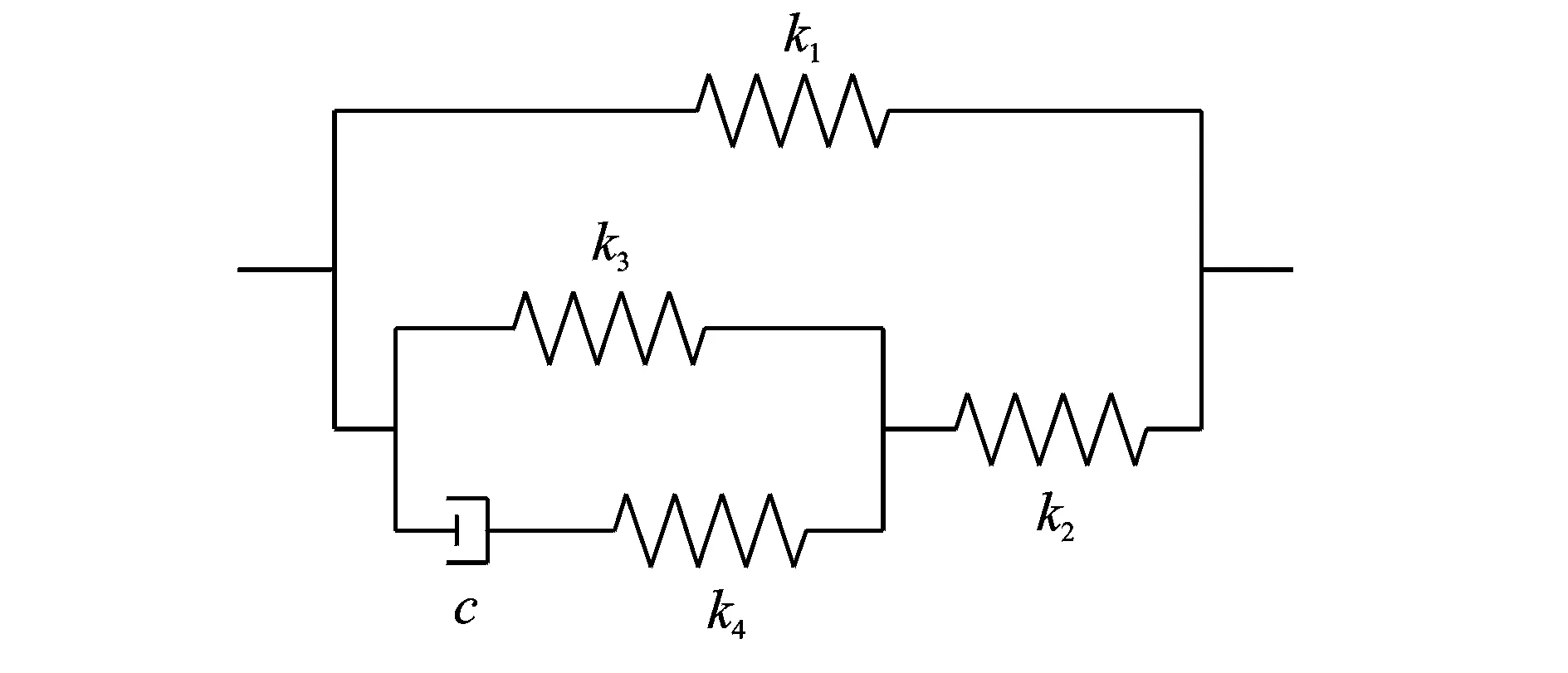
图2 简化五参数模型
由机械阻抗理论可知,弹簧元件的机械阻抗为Zk=k,阻尼元件的机械阻抗为Zc=jωc;并联系统的总阻抗等于各要素阻抗之和,总的力为各要素力的和,串联系统各要素所受到的力相等,总阻抗的倒数等于各要素阻抗倒数之和[14]。由图2可知,三参数模型块的机械阻抗Z1为
(1)
式中 拉普拉斯算子s=jω,ω为振动圆频率,又因其整体与刚度系数k2串联,然后与刚度系数k1并联,因此五参数模型的总机械阻抗为
(2)
令
(3)
(4)
(5)
由此式(2)可简写为
(6)
1.2 模型等效
为了设计、使用和性能参数测试方便,五参数模型可进一步简化为如图3所示的三参数模型,其物理参数有刚度系数kA,kB和阻尼系数cA,kB与cA串联,然后与kA并联。
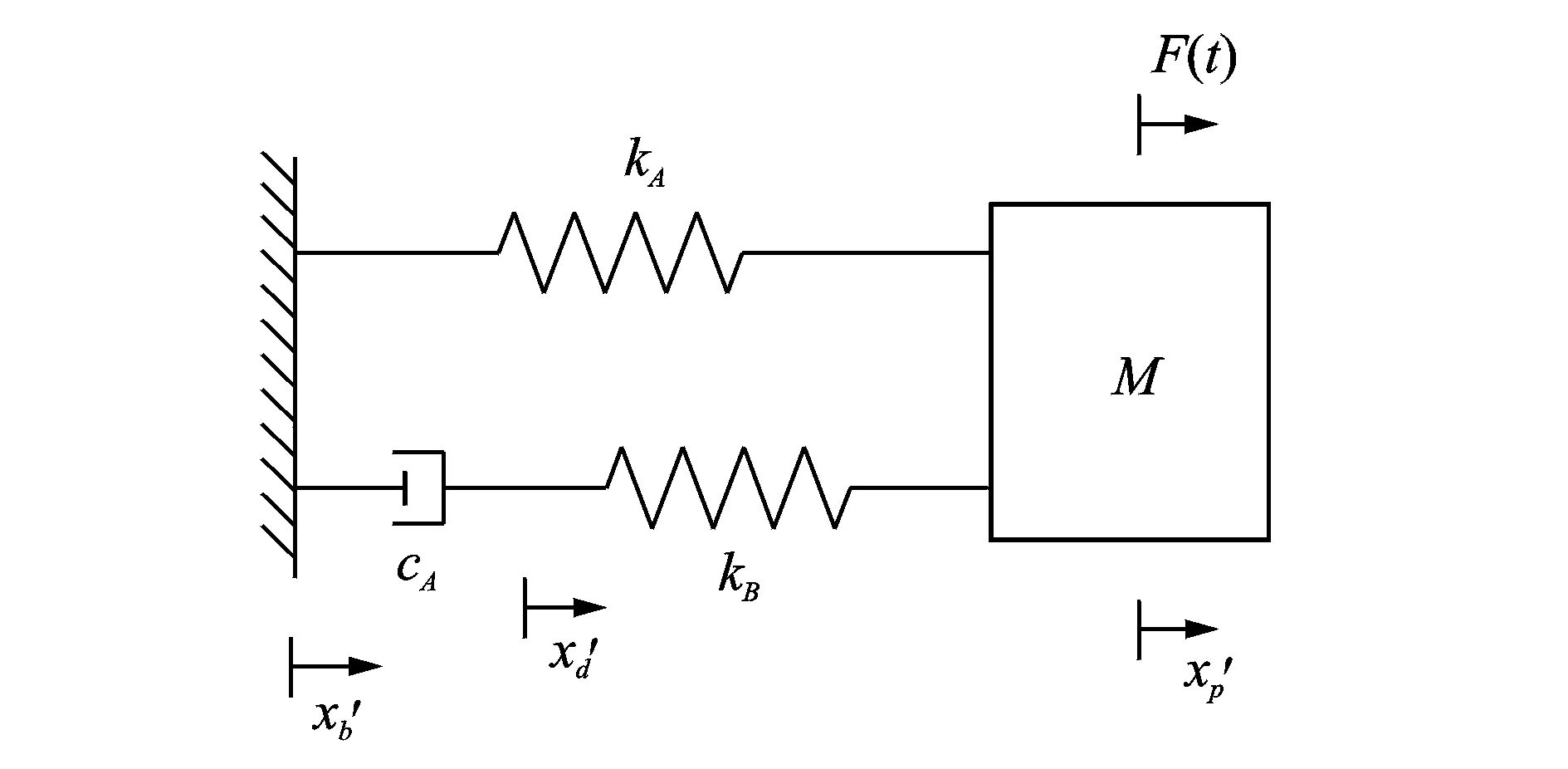
图3 三参数模型
同理,在计算时略去其质量,由机械阻抗理论可得其机械阻抗ZT的表达式,如下式所示
(7)
上式可进一步化简为:
(8)
(9)
(10)
由式(6),(8)可知,二者形式相同,因此令对应项相等,如下式所示
(11)
求解方程则可得到
(12)
由上式可知,将五参数模型等效为三参数模型时,等效参数由式(12)获得。
1.3 等效两参数模型
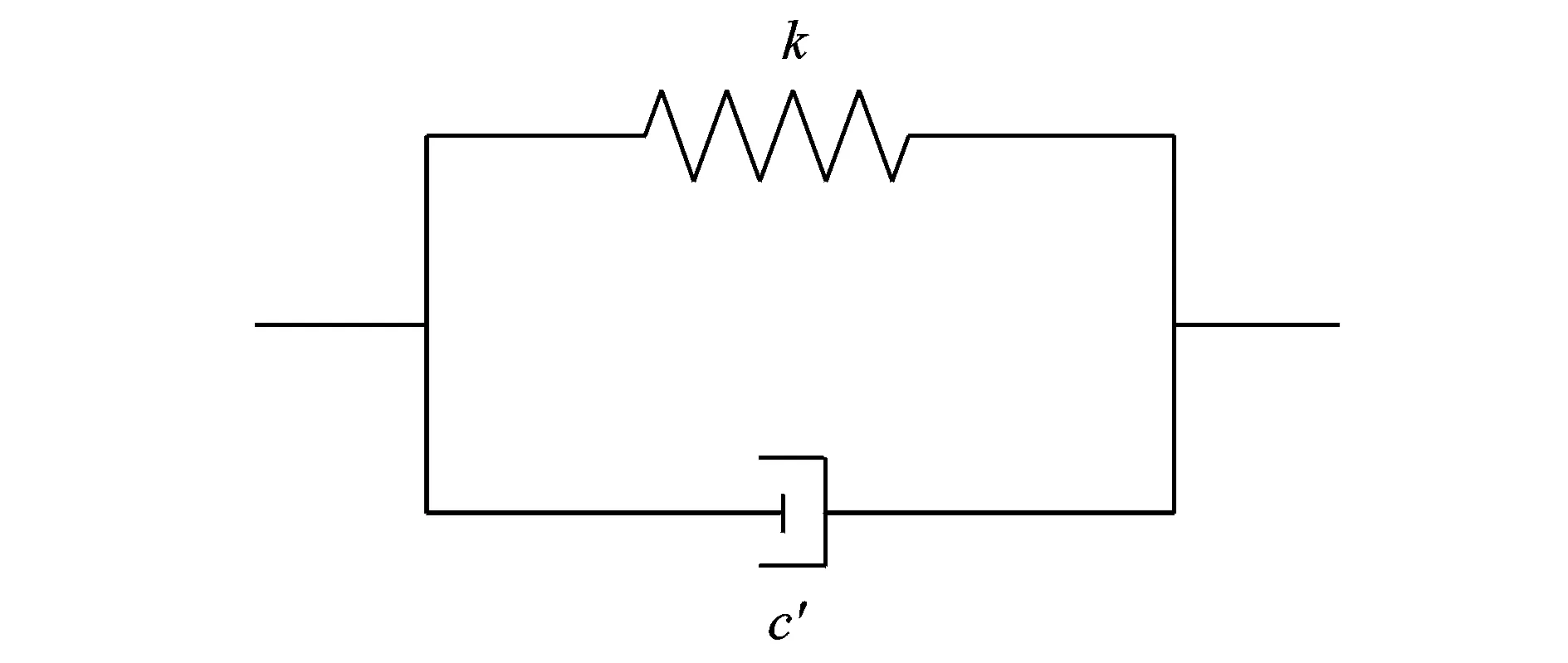
图4 等效两参数隔振器模型
同样,图3所示三参数模型可进一步等效为如图4所示的等效两参数模型,其刚度系数k与阻尼系数c′并联。由机械阻抗理论可知,等效两参数模型的机械阻抗Z2为
Z2=k+sc′
(13)
令式(8),(13)相等可得
(14)
解出cA,kB的表达式为
(15)
(16)
通过以上步骤,就将隔振器整体动力学参数与各组件性能参数联系起来。
2 试验测试
2.1 等效动力学参数c′和k的测试原理
对于如图4所示的隔振器整体等效两参数模型,依据微振动隔振器的特点,本文采用迟滞环法测试其等效阻尼系数c′和等效刚度系数k。测试原理如下:阻尼力与位移之间因阻尼作用而形成迟滞环[15],如图5所示。
在图5(a)中,其关系可由如下椭圆方程表示
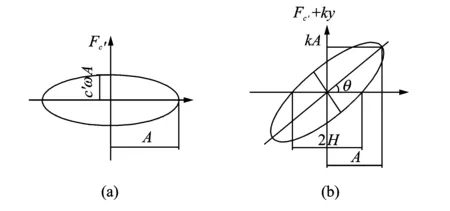
图5 迟滞环曲线
(17)
式中Fc′为阻尼力,y为振动位移响应,A为振动位移幅值。由其数学表达式可知,椭圆的短轴包含等效阻尼系数c′的信息,如下式所示
(18)
式中L为椭圆短轴的长度。L可由椭圆的面积S得出,如下式所示
(19)
综合式(18),(19)可得等效阻尼系数c′的表达式为
(20)
由于实际测试的力包含系统刚度引起的弹性力,即Fc′+ky,故测试的迟滞环将旋转一定的角度,如图5(b)所示。由于弹性力在振动循环中不消耗能量,故椭圆面积不变。在实际应用中,由数值积分可得到椭圆的面积Sk,式(20)变为
(21)
由斜椭圆的斜率可得等效刚度系数k为
k=tanθ
(22)
进而由式(15),(16)可得cA,kB的数值,由式(12)可得阻尼系数c和刚度系数k4的表达式为
(23)
2.2 等效动力学参数c′和k的测试装置
如图6所示为测试装置示意图,主要包括承力工装、力传感器、激光位移传感器、激振器、数据采集与分析系统、控制系统、功率放大器等。在试验过程中,控制系统首先发出定频正弦信号经功率放大器放大后传输到激振器,进而激励隔振器。隔振器右端与激振器连接,端部为激光位移传感器(采用德国Polytec激光位移测量系统,型号为psv-200,其位移精度为0.1 μm),左端通过力传感器与承力工装连接。数据采集与分析系统采集力传感器与位移传感器的力信号与位移信号,从而得到该频率下力与位移之间的迟滞环。改变激励频率后,重复上述步骤,即可得到各个频率下的迟滞环曲线。在试验过程中,整个系统接地线去除电噪声的影响,并采用带通滤波滤掉直流分量和其他干扰频率。图7所示为测试装置的实物图,图8所示为测试得到的迟滞环曲线。
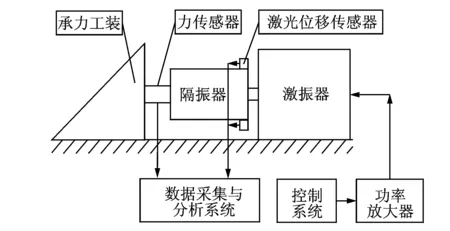
图6 等效阻尼系数测量装置示意图
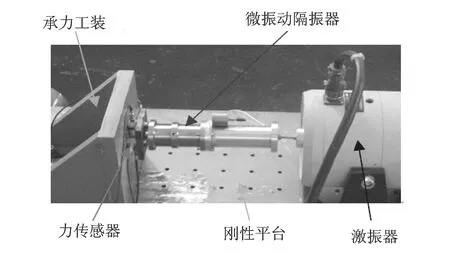
图7 测试装置实物图
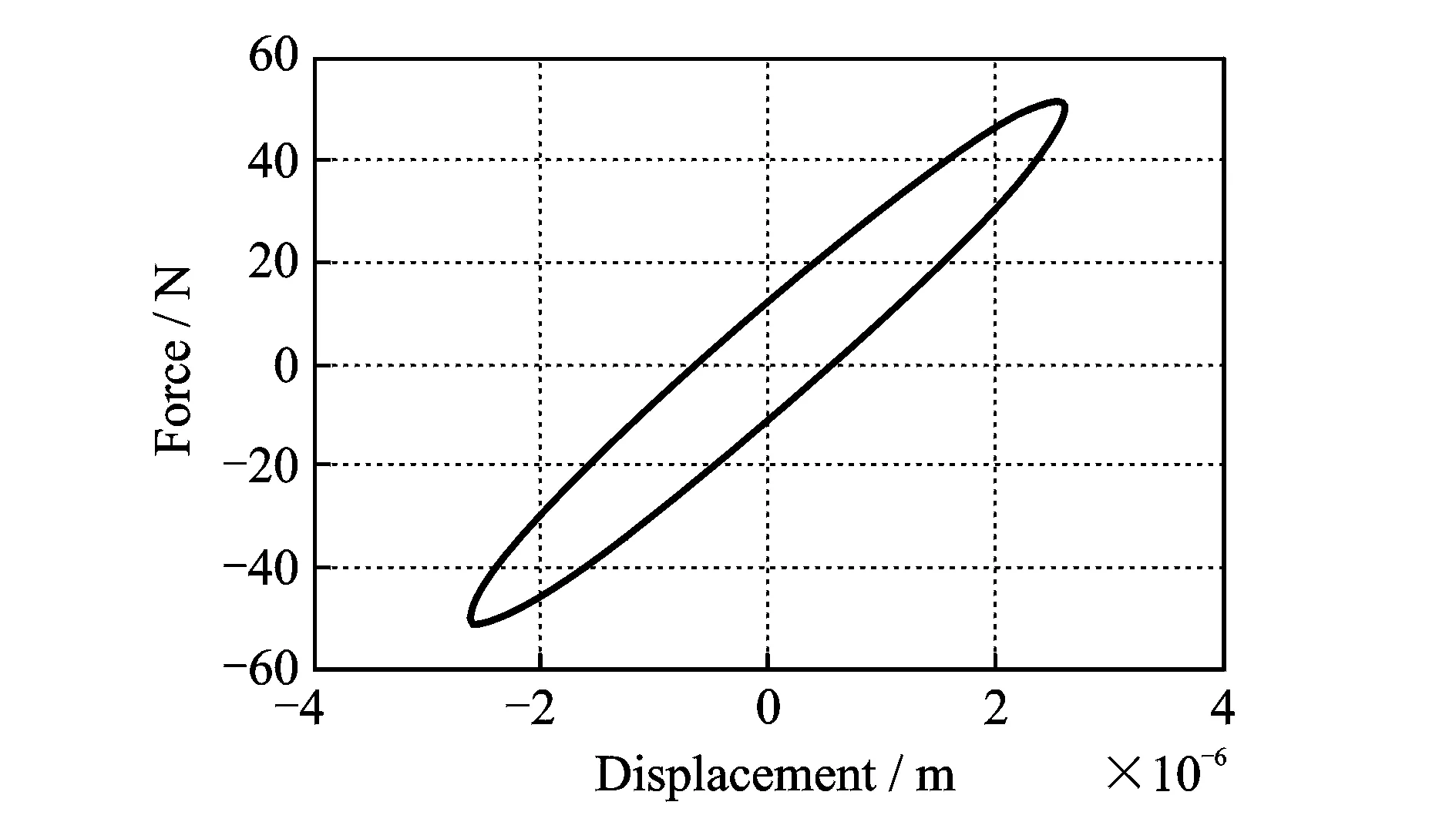
图8 测试迟滞环
2.3 刚度系数的测试装置
如式(12),(15),(16),(23)所示,式中刚度系数k1,k2,k3是由等效阻尼系数c′和等效刚度系数k计算隔振器动力学参数cA,c,kB,k4时所必需的参数,本文采用附加质量法获取各个组件的刚度系数值。测试装置如图9所示,主要包括控制系统、功率放大器、激振器、大质量块、承力工装、隔振器、力传感器、数据采集与分析系统等,其中大质量块与激振器采用悬挂方式安装。控制系统首先发出正弦扫频信号经功率放大器放大后传输到激振器,进而激励整个系统。大质量块与激振器通过力传感器B连接,其左侧与隔振器连接。隔振器的左端通过力传感器A与承力工装连接,约束其端部位移。数据采集与分析系统采集两个力传感器的力信号,通过数据处理,可得系统的传递率曲线,如图10所示为测试外筒刚度k1时所得的传递率曲线。
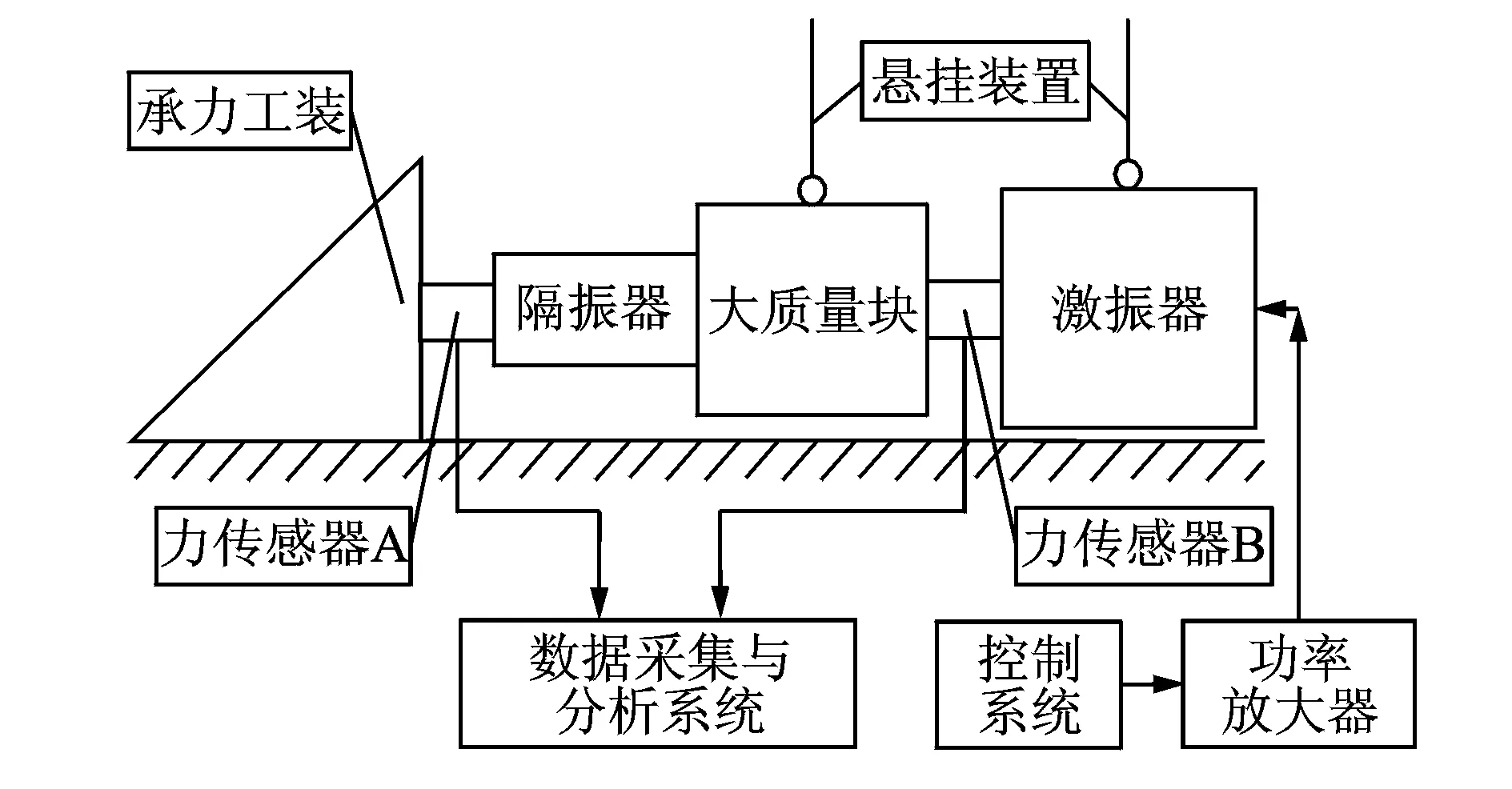
图9 刚度系数测试装置示意图
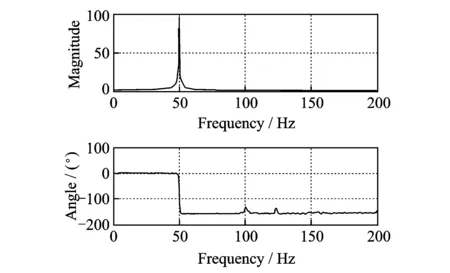
图10 力传递率曲线
试验中刚度系数测试步骤如下:
(1)测试样机外筒刚度系数k1。
(2)测试样机内筒刚度系数k2。
(3)测试样机内芯无油时的刚度系数k3。
各个组件的刚度测试结果如表1所示。
由式(12)可得等效三参数模型的刚度系数kA=9.085×106N/m。
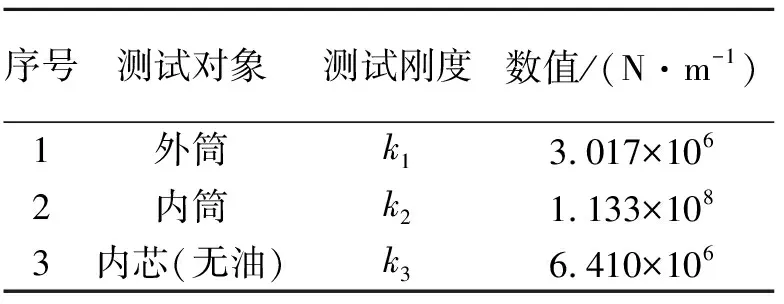
表1 刚度系数测试结果
3 Simulink仿真分析
由式(12),(15),(16)可知,kB与k4,cA与c为一一对应关系,cA,kB和等效参数c′,k为单值关系。此外,由图1,3可知,微振动隔振器内含粘性流体,阻尼系数c,cA分别与刚度系数k4,kB串联耦合,由于流动状态的复杂性,较难从理论上获得其数值随频率的变化规律。为验证采用机械阻抗等效的方法测试多参数模型中阻尼系数和刚度系数的正确性,将计算得到的振动模型各刚度系数与阻尼系数输入到仿真模型中,得到隔振器整体的等效阻尼系数c′和等效刚度系数k,将其与试验结果进行对比,由于各数值的唯一性,通过比较二者误差的大小即可判断方法的有效性。在仿真过程中,采用Simulink软件建立系统的仿真模型,其以系统的运动方程为基础[16~19]。
如图3所示,在其右端部施加简谐力,系统的运动方程为
(24)
将上式两边同时作Laplace变换可得
(25)
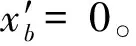
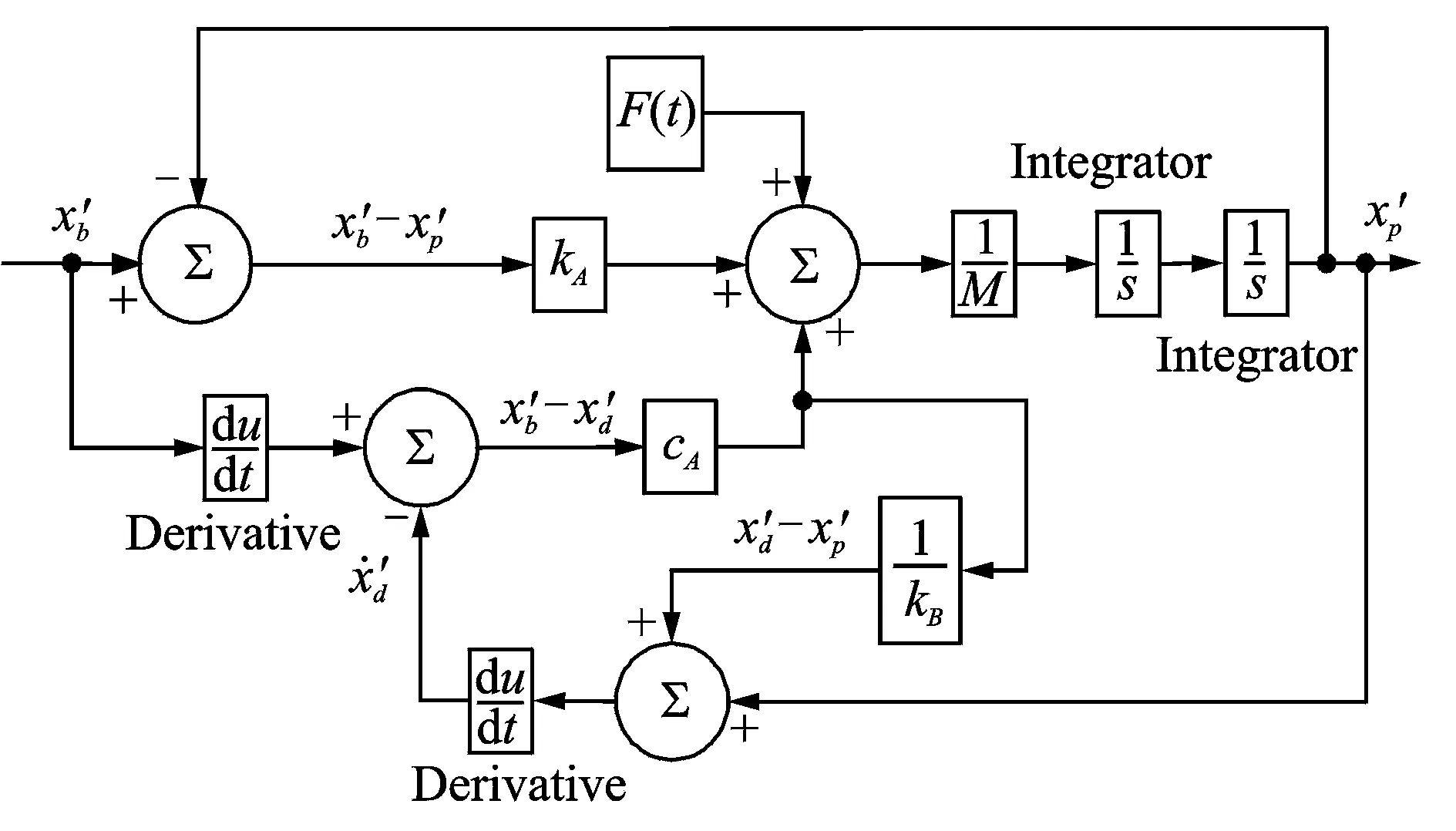
图11 三参数时域仿真模型
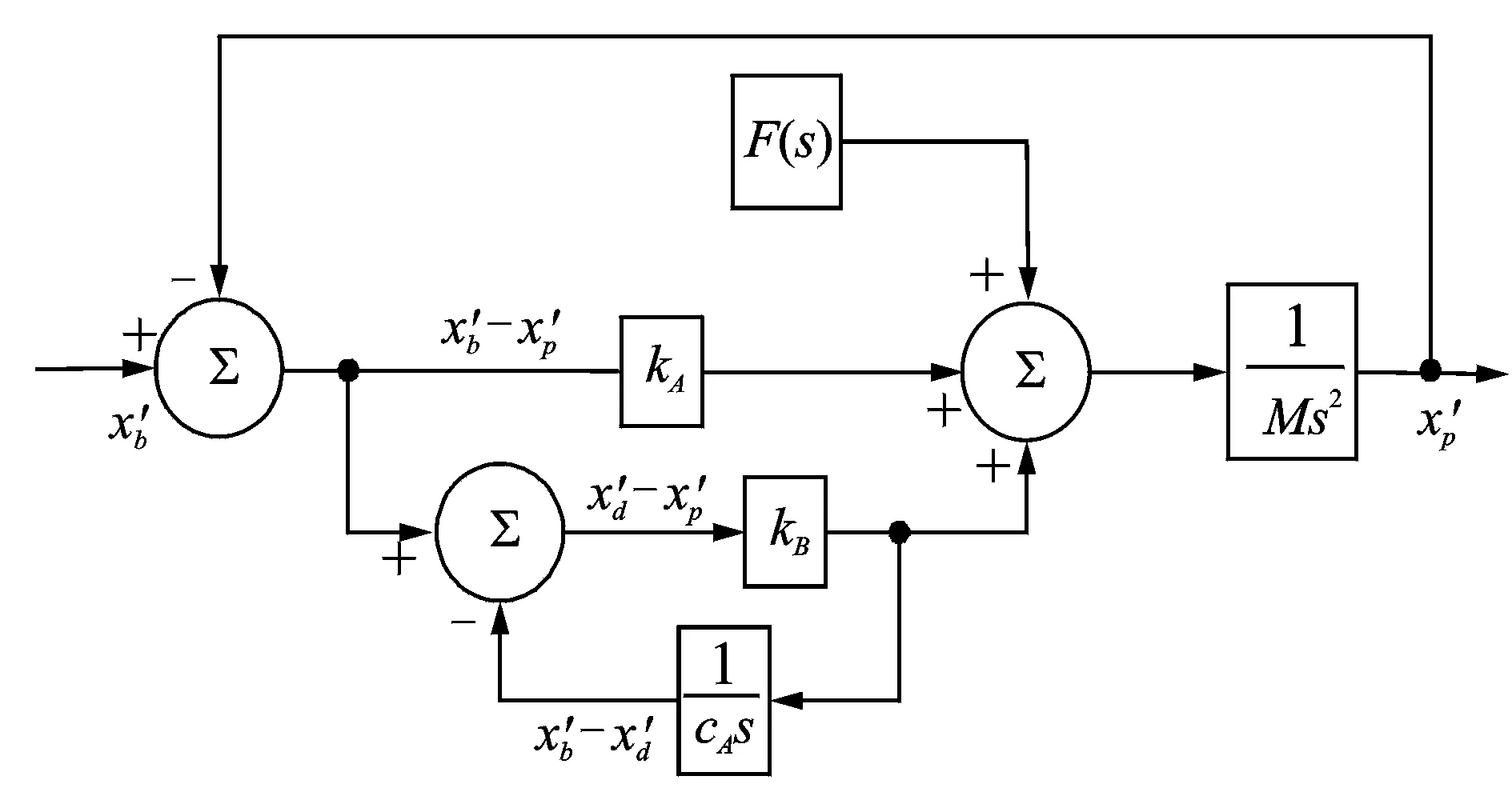
图12 三参数频域仿真模型
同理,如图1所示,系统的运动方程为
(26)
将上式两侧作Laplace变换可得
(27)
由式(26),(27)建立的Simulink仿真模型分别如图13,14所示,其中xb=0。
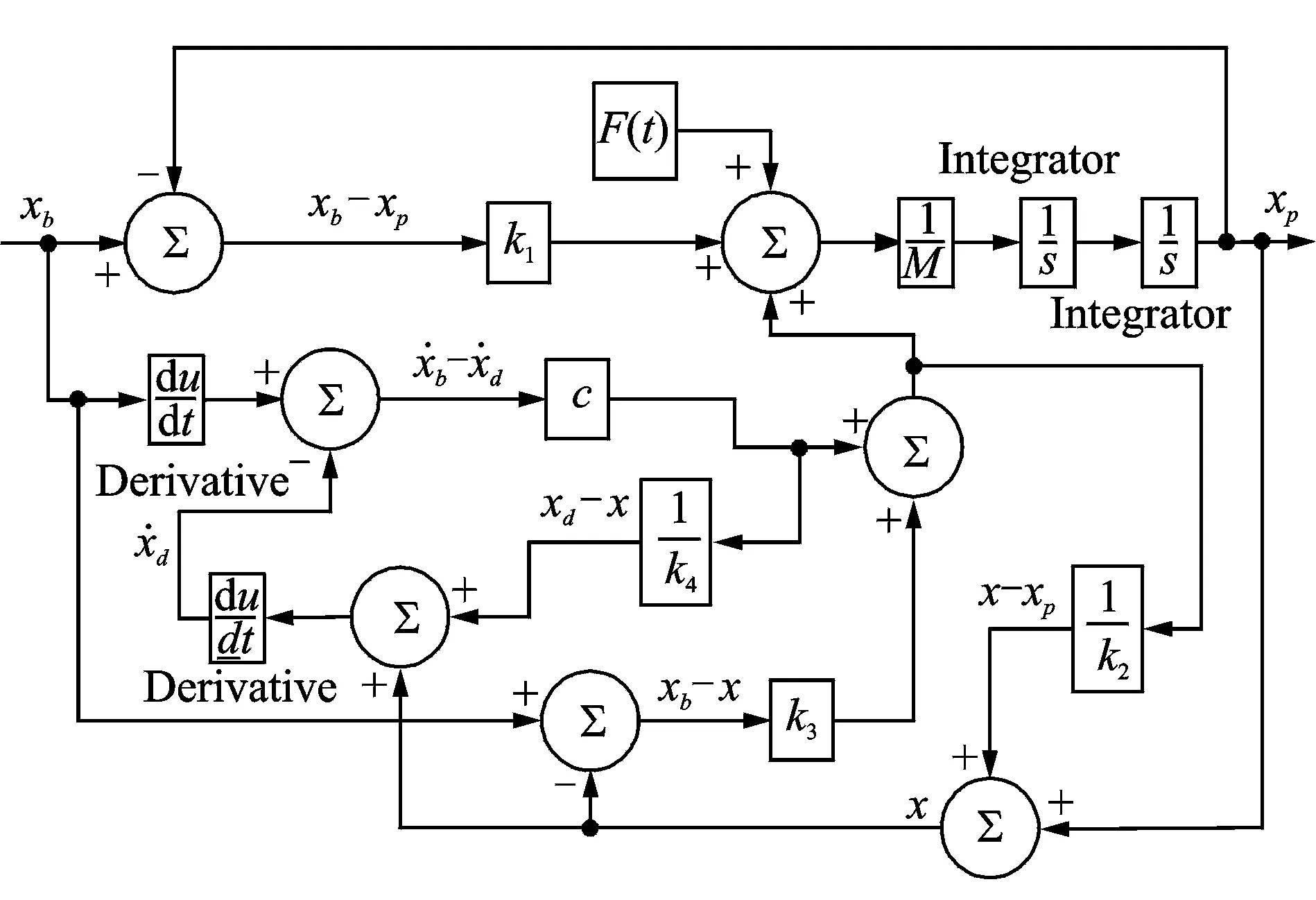
图13 五参数时域仿真模型

图14 五参数频域仿真模型
4 试验、仿真结果及讨论
如图15所示为阻尼系数c,cA曲线图。由式(12)可知,二者为线性关系,由试验结果计算得知
cA=0.896c
(28)
随着频率的增加,阻尼系数先急剧下降,随后趋于平稳,且最小的阻尼系数也可达1 500 N·s/m,属于大阻尼范围。通过曲线拟合,阻尼系数c近似与频率成如下函数关系
c=a×fb
(29)
式中a=2.389×106,b=-0.714,f为横轴频率坐标。图16所示为刚度系数kB,k4的曲线图,随着频率的增加,刚度系数缓慢增大。通过曲线拟合可得如下表达式
(30)
式中A1=6.410×106,B1=127 897.600,C1=-955.470,D1=2.050;A2=7.640×106,B2=160 851.530,C2=-1 131.900,D2=2.310。
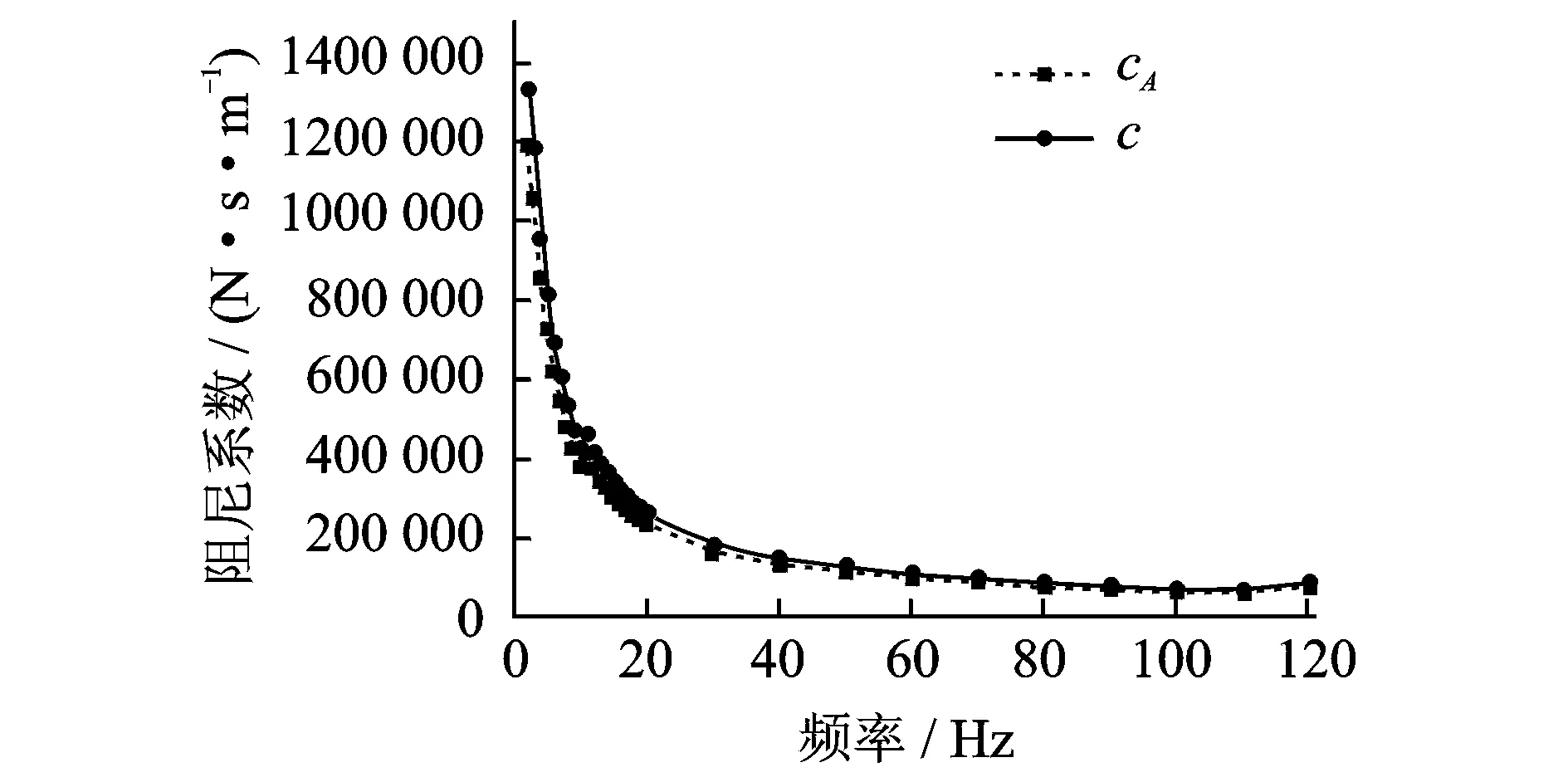
图15 阻尼系数曲线图
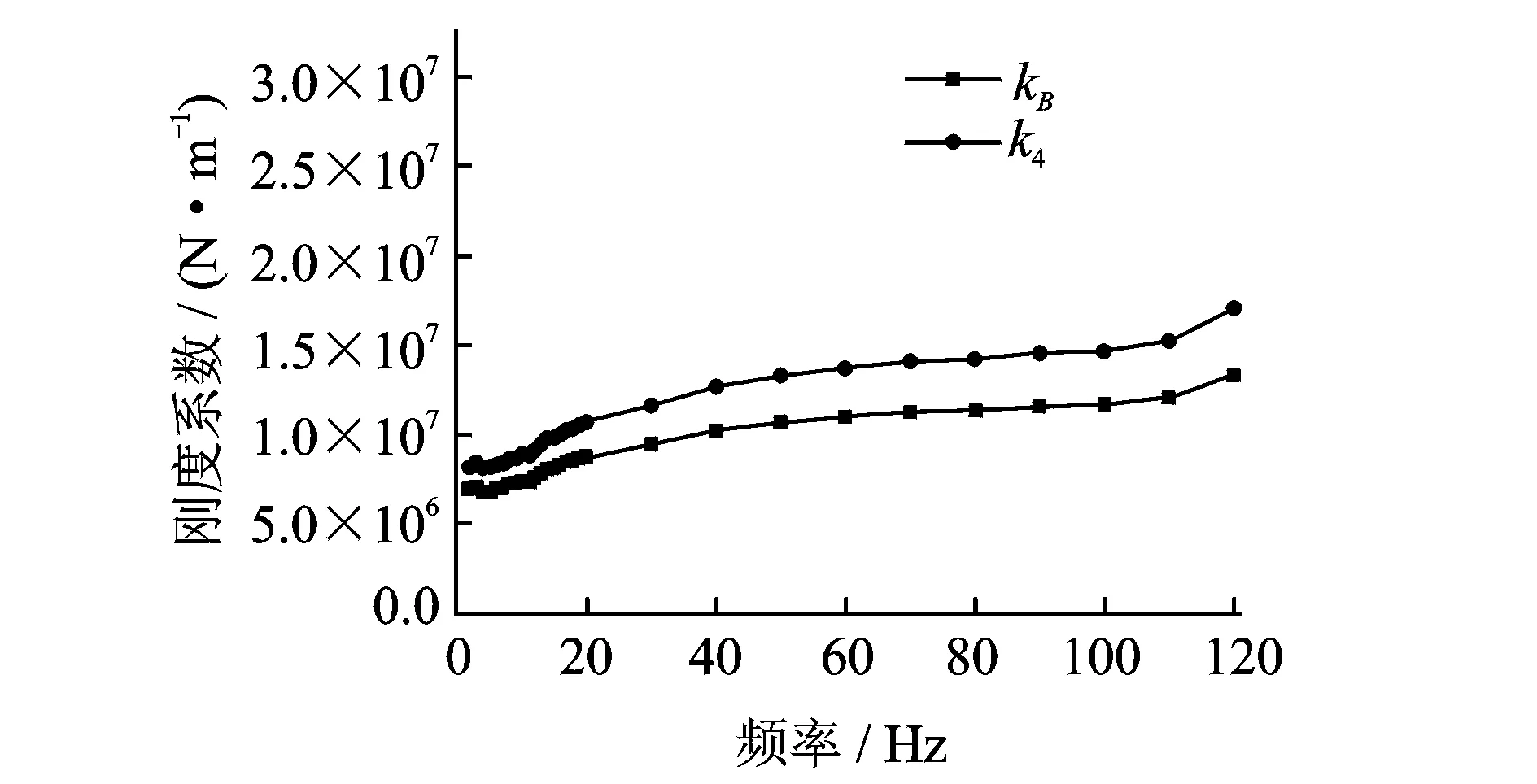
图16 刚度系数曲线图
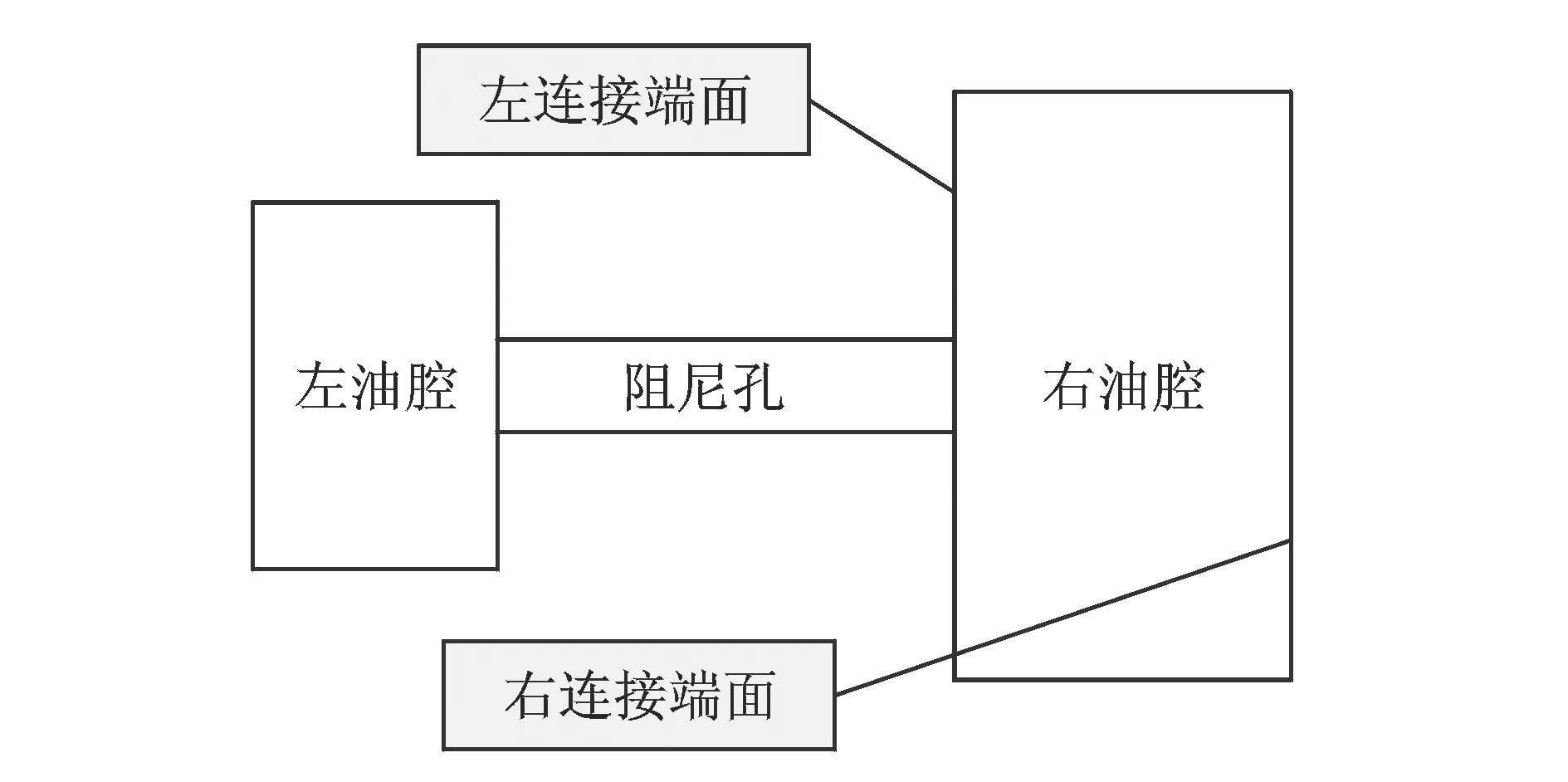
图17 油腔结构示意图
图17所示为隔振器内芯油腔结构示意图,其内含硅油粘性流体,通过左、右连接端面分别与内筒、外筒相连接,组成隔振器整体样机。当隔振器受到外力激励产生弹性变形时,驱动左、右油腔内的流体通过细长阻尼孔往复运动[20]。在低频时,整个阻尼孔内的流体可充分流动,因此粘性流体的剪切耗能作用强,产生的阻尼系数大。由于流体具有可压缩性,随着频率的增加,阻尼孔内流体的实际流动长度会缩短,中间一段流体几乎不能为左右油腔内的流体所替代,因此其剪切耗能作用下降,阻尼系数降低。同时由于阻尼孔内流体的流动效应随着频率的增加而下降,左右油腔内的流体可抵抗更多的外力,其弹性效应增加,刚度系数增大。
图18(a),(b)所示为测试、仿真得出的整体等效阻尼系数c′的对比曲线图。由图可知,二者具有较好的一致性,每个频率点的相对误差均在5%以内,且最小阻尼系数也可达1 000 N·s/m。图19(a),(b)所示为测试、仿真得出的整体等效刚度系数k的对比曲线图,同样地,试验结果与仿真结果的相对误差均在5%以内,显示出较好的一致性。仿真输入力的幅值有50和100 N,从图中可以看出结果没有显著变化。以上结果有效地验证了采用机械阻抗等效的方法测试阻尼系数和刚度系数的正确性,针对大阻尼粘性流体微振动隔振器,能够有效地测试出其内在的阻尼和刚度特性,对于隔振设计具有重要的参考价值。

图18 试验与仿真所得等效阻尼系数

图19 试验与仿真所得等效刚度系数
5 结 论
本文主要针对航天器所用的粘性流体微振动隔振器进行研究。根据该类型隔振器具有大阻尼且振动位移为微米量级的特点,提出采用机械阻抗等效的方法测试其动力学特性参数。应用机械阻抗等效理论将五参数模型转化为三参数模型,再将其进一步等效为两参数模型,在此基础上,自行设计了试验测试系统,采用迟滞环法测试隔振器整体等效阻尼系数和等效刚度系数。根据系统的物理模型,建立了Simulink仿真模型,将数据处理所得振动模型数据输入到仿真模型中,得到隔振器整体等效阻尼系数和等效刚度系数,并将其与试验测试结果相比较,二者具有良好的一致性,有效地验证了本方法的正确性与可行性。本方法还可得到阻尼系数和刚度系数随频率的变化规律,对于隔振设计具有重要的参考价值,其可推广应用于一般的隔振器阻尼系数和刚度系数的测量。
参考文献:
[1] 黄文虎, 曹登庆, 韩增尧. 航天器动力学与控制的研究进展与展望[J] . 力学进展, 2012,42(4):367—394.Huang Wenhu, Cao Dengqing, Han Zengyao. Advances and trends in dynamics and control of spacecraft[J]. Advances in Mechanics, 2012,42(4):367—394.
[2] 张振华, 杨雷, 庞世伟. 高精度航天器微振动动力学环境分析[J]. 航天器环境工程, 2009,26(6):528—534.Zhang Zhenhua, Yang Lei, Pang Shiwei. Jitter environment analysis for micro-precision spacecraft[J]. Spacecraft Environment Engineering, 2009,26(6):528—534.
[3] Davis L P, Carter D R, Hyde T T. Second-generation hybrid D-strut[A].Smart Structures & Materials′95[C]. International Society for Optics and Photonics, 1995:161—175.
[4] Hyde T T, Anderson E H. Actuator with built-in viscous damping for isolation and structural control [J]. AIAA Journal, 1996,34(1):129—135.
[5] Vaillon L, Philippe C. Passive and active microvibration control for very high pointing accuracy space systems[J]. Smart Materials and Structures, 1999,8(6):719—728.
[6] Cobb R G, Sullivan J M, Das A, et al. Vibration isolation and suppression system for precision payloads in space[J]. Smart Materials and Structures, 1999,8(6):798—812.
[7] Sullivan J M, Gooding J C, Idle M K, et al. Performance testing for an active/passive vibration isolation and steering system[A].AIAA Dynamics Specialists Conference[C]. Salt Lake City, 1996:87—97.
[8] Vaillon L, Petitjean B, Frapard B, et al. Active isolation in space truss structures: from concept to implementation[J]. Smart Materials and Structures, 1999,8(6):781—790.
[9] Davis L P, Cunningham D, Bicos A S, et al. Adaptable passive viscous damper: an adaptable D-StrutTM[A].1994 North American Conference on Smart Structures and Materials[C]. International Society for Optics and Photonics, 1994:47—58.
[10] Davis P, Cunningham D, Harrell J. Advanced 1.5 Hz passive viscous isolation system[A].35th AIAA SDM Conference[C]. Hilton Head, South Carolina, 1994:1—11.
[11] Davis L P, Workman B J, Chu C C, et al. Design of a D-strutTMand its application results in the JPL, MIT, and LARC test beds[A].AIAA/ASME/AHS/ASC Structures, Structural Dynamics and Material Conference[C]. Dallas, USA, 1992:1 524—1 530.
[12] 戴德沛. 阻尼减振降噪技术[M]. 西安: 西安交通大学出版社, 1986:53—107.Dai Depei. Damping Vibration and Noise Reduction Technology[M]. Xi′an: XI′AN JIAOTONG UNIVERSITY PRESS, 1986:53—107.
[13] 陈奎孚, 张森文. 半功率点法估计阻尼的一种改进[J]. 振动工程学报, 2002,15(2):151—155.Chen Kuifu, Zhang Senwen. Improvement on the damping estimation by half power point method[J]. Journal of Vibration Engineering, 2002,15(2):151—155.
[14] Anderson E, Trubert M, Fanson J, et al. Testing and application of a viscous passive damper for use in precision truss structures[A].AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference[C]. Baltimore,USA,Apr. 1991:8—10.
[15] Oh H U, Izawa K, Taniwaki S. Development of variable-damping isolator using bio-metal fiber for reaction wheel vibration isolation[J]. Smart Materials and Structures, 2005,14(5):928—933.
[16] Putnam D, Eraker J H, Mohl J B. Vibration isolation module for exposed facility payloads[A].Conference and Exhibit on International Space Station Utilization[C]. Cape Canaveral, 2001.
[17] Wilson G W, Wolke P J. Performance prediction of D-Strut isolation systems[A].Smart Structures and Materials′97. International Society for Optics and Photonics[C]. 1997:236—250.
[18] Liu K C, Blaurock C, Mosier G E. Pointing control system design and performance evaluation of TPF coronagraph[A].Astronomical Telescopes and Instrumentation[C]. International Society for Optics and Photonics, 2004:437—448.
[19] Boyd J, Hyde T T, Osterberg D, et al. Performance of a launch and on-orbit isolator[A].SPIE′s 8th Annual International Symposium on Smart Structures and Materials[C]. International Society for Optics and Photonics, 2001:433—440.
[20] Rittweger A, Albus J, Hornung E, et al. Passive damping devices for aerospace structures[J]. Acta Astronautica, 2002,50(10):597—608.
猜你喜欢
大电机技术(2022年5期)2022-11-17
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
天天爱科学(2020年6期)2020-09-10
疯狂英语·新读写(2020年3期)2020-06-06
当代工人(2020年8期)2020-05-25
北方工业大学学报(2019年5期)2019-03-30
小溪流(画刊)(2017年12期)2018-01-10
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25