
横向磁通永磁电机直接转矩控制系统研究
2014-03-25 06:03袁小庆苏士斌史仪凯
西北工业大学学报 2014年3期
袁小庆, 苏士斌, 史仪凯
(西北工业大学 机电学院, 陕西 西安 710072)
横向磁通永磁电机(transverse flux permanent-magnet motor,TFPM)的电路与磁路不在同一平面上,消除了传统电机槽宽和齿宽相互制约的矛盾,从根本上提高了转矩密度[1]。横向磁通永磁电机具有转矩密度高的优点,在低速直接驱动的场合具有良好的应用前景[2-3]。直接转矩控制(direct torque control,DTC)变频调速是继矢量控制技术之后又一新型的高效变频调速技术,把转矩直接作为被控量控制,其实质是对定子磁链和电磁转矩进行直接控制的。定子磁链估计精确度直接影响直接转矩控制性能的好坏,基于定子磁链的电压模型估算定子磁链是普遍应用的一种方法。文献[4]给出了一种利用转子位置和定子电流估计磁链方法,但是由于引入了编码器装置,会产生增大系统体积、增加成本等不利影响。
但传统直接转矩控制采用滞环比较器来控制,存在明显缺陷,开关频率变化可能导致2个桥臂的开关状态同时切换,扇区切换处产生电流和转矩畸变,起动和低速性能差,以及需要很高的采样频率来实现数字滞环比较器[5]。传统的直接转矩控制弱磁方法是在弱磁区将定子磁链参考值跟随转速成反比变化。定子磁链参考值的高或低都不能使电机产生最大的输出转矩[6]。为此,本文采用一种新颖的空间矢量直接转矩控制(Space Vector Modulation DTC,SVM-DTC)的控制方式,将磁链和转矩误差信息分别通过PI控制器解耦出电机空间电压矢量中控制转矩和磁链的2个分量,进行SVM-DTC控制;同时,采用基于转子位置和定子电流的估算磁链方法。通过构建改进的直接转矩控制的系统模型,与直接转矩控制进行对比研究,结果表明改进的直接转矩控制比传统直接转矩控制减小了转矩脉动,提高了输出转矩和转速,使横向磁通永磁电机更加满足高转矩、低转速领域的应用要求。
1 TFPM数学模型
横向磁通永磁电机各相之间独立,无互感作用,实现了磁路结构上的解耦。m相TFPM电机电枢磁场在空间上是由m个独立的单相正弦脉振磁场构成。单相的脉振磁场与转子永磁体磁场作用形成单相电磁转矩,在输入电流后在每相所产生的转矩通过转子作用于同一个轴上,产生的合成转矩是各相所产生转矩相加。对电机的a相进行分析,建立TFPM的数学模型,忽略电机的铁心饱和、涡流和磁滞损耗,a相定子绕组瞬时电压方程为
(1)
式中:u为端电压;ia为a相电流;Ra为绕组电阻;La为绕组自感;ea为反电动势。
取转子纵轴d与磁极中心线一致,横轴q沿转子旋转方向领先纵轴90°电角度。可以得到TFPM 的电压、磁链和电磁转矩方程[6-7]:
(2)
(3)
(4)
式中:Ψs为定子磁链;Ψf为转子磁链;R为定子相绕组电阻;pn为极对数;Ld与Lq为定子绕组的d、q轴电感;γ为转子位置角。
可以看出,电磁转矩包括永磁转矩和磁阻转矩两部分,因此只要按一定的规律调整定子磁链的幅值和转矩角,就能够得到要求的转矩。
2 TFPM直接转矩控制建模
2.1 传统直接转矩控制模型
电机本体模块是所有电机控制系统模型中不可或缺的一部分,它的正确搭建是整个系统模型的基础。对a相和b相进行分析,根据上述电机数学模型搭建了横向磁通永磁电机本体模块,如图1所示。
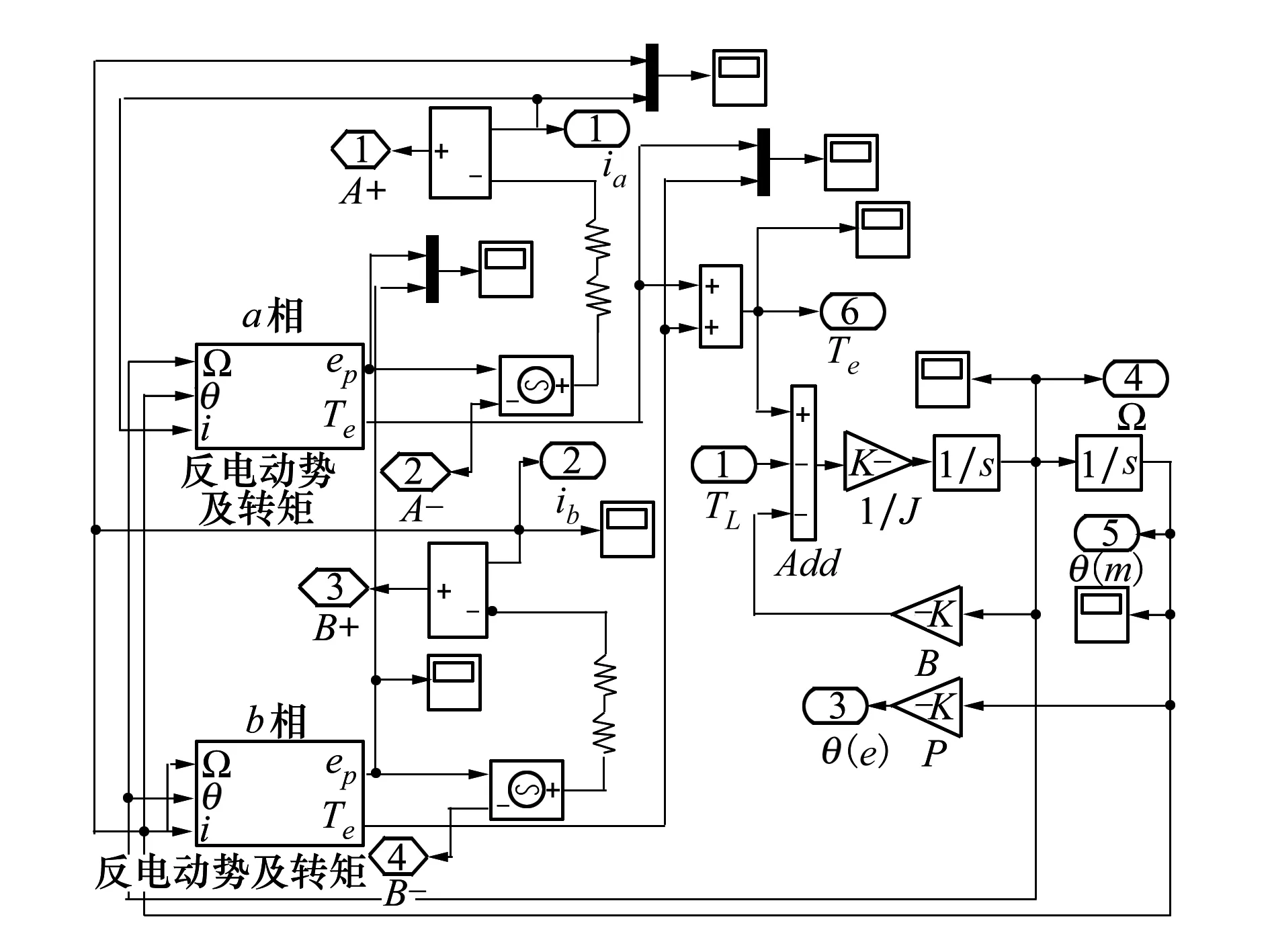
图1 TFPM电机的本体模块
为了使搭建的模型更加系统化、模块化,将新型横向磁通永磁电机各相分别集成为一个子模块,此模块中包含了每一相产生的反电动势和电磁转矩,电机产生的总电磁转矩即为各相转矩之和。
将TFPM电机本体模型封装为TFPM model模块,其输入分别是电机的相电压以及负载转矩TL,输出主要为电机的两相电流ia、ib以及电磁转矩Te和机械角速度Ω。
基于TFPM本体模块建立传统直接转矩控制的系统模型,如图2所示。控制系统模型主要包括TFPM本体模块、逆变模块和控制模块。直接转矩的控制模块由转矩调节器、滞环比较器、转矩和磁链估测模块、驱动模块及位置检测模块构成。
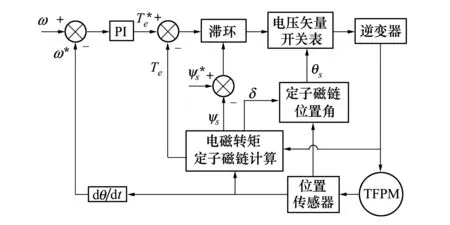
图2 传统直接转矩控制模型
2.2 空间矢量直接转矩控制模型
由于传统直接转矩控制方法中采用多级滞环选择方法,其在低速条件下磁链环的波动比较大,主要是因为在该控制系统中没有考虑低速时定子电阻对系统的影响。为了解决相应问题,提出了TFPM的空间矢量直接转矩控制(SVM-DTC)控制的控制方案。TFPM的SVM-DTC控制采用速度环和转矩环的双闭环控制方法。在SVM-DTC控制中采用了参考电压估算器和SVPWM的生成器取代了常规DTC的磁链转矩滞环和开关表。使用SVM-DTC控制可以实现电压矢量的近似连续调节,减小转矩脉动,同时逆变器 的开关频 率固定,改善了系统的控制性能。仿真控制系统主要由TFPM电机本体和主电路模块、磁链和转矩估计模块、参考电压矢量估计模块和SVPWM生成模块组成。
空间矢量直接转矩控制系统模型包括转矩和磁链控制模块、驱动模块等,图3为直接转矩控制系统模型。随着转速的提高,磁链和转矩在某些区域控制失败,不可控的区域变大,电机输出转矩脉动较大。通过增加一个电角度周期内的电压矢量个数即增加系统对电机的控制频率,削弱电流谐波,可有效地减小转矩脉动和磁链。这也是目前基于电压矢量开关表查询方式的直接转矩控制中来克服转矩脉动的不错方案。
本文将电压矢量增加为9个,定子磁链区域细分成8份,电压矢量在磁链区域中的位置分布由空间矢量理论确定,括号内为电压矢量所对应的驱动信号。V9为零电压矢量,其在控制过程中的作用主要是保持当前电磁转矩,减小逆变器的开关次数和转矩脉动的产生,使电机运行的更加平稳。
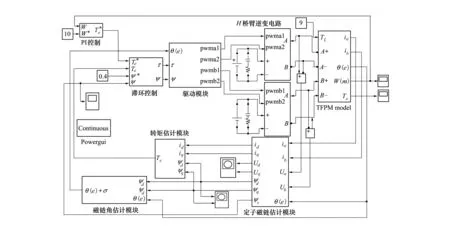
图3 空间矢量直接转矩控制系统模型
直接转矩控制的好坏直接取决于电压矢量开关表的建立,通过光电编码器获取连续转子位置角,由(7)式和(8)式求得定子磁链的位置角,根据其位置角、估测的转矩及磁链值,查询改进的电压矢量开关表,得到相应驱动信号,使电机各相的磁链和转矩完全得到控制。

(5)
θs=δ+θe
(6)
式中:δ为转矩角;θs为定子磁链位置角。
横向磁通永磁电机控制系统采用直接转矩控方式,其核心是将定子磁链和电磁转矩滞环控制,根据给定的转矩、磁链值与其反馈的计算值作差[6],根据两者的误差并结合定子磁链的位置通过查询电压矢量开关表选择合适的电压矢量以此来实现定子磁链的轨迹为恒定圆形。
表1为TFPM在H桥臂逆变电路的情况下的电压矢量开关表。

表1 电压矢量开关表
系统模型仿真后得到定子磁链轨迹如图4所示,磁链滞环控制会使定子磁链圆环产生一定的环宽。仿真结果表明,改进的电压矢量开关表能够使两相横向磁通永磁电机的磁链轨迹控制达到理想效果。

图4 定子磁链轨迹
3 直接转矩控制实验
为了进一步研究上述控制方案的合理性,本文基于课题组研制的1台四相平板式横向磁通永磁电机构建实验平台,进行控制方案研究,如图5所示,该样机的主要参数如表2所示。电机控制系统的性能与电机特性、负载特性及控制方式等因素有关,本文仅在恒定负载条件下研究2种控制方式对样机的性能影响。
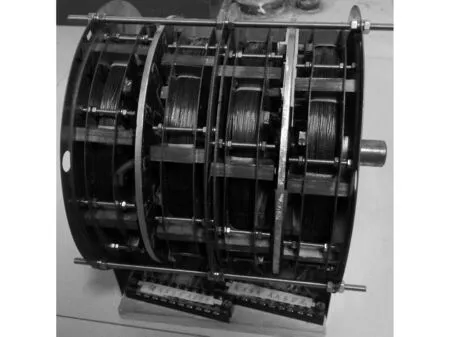
图5 新型横向磁通永磁样机
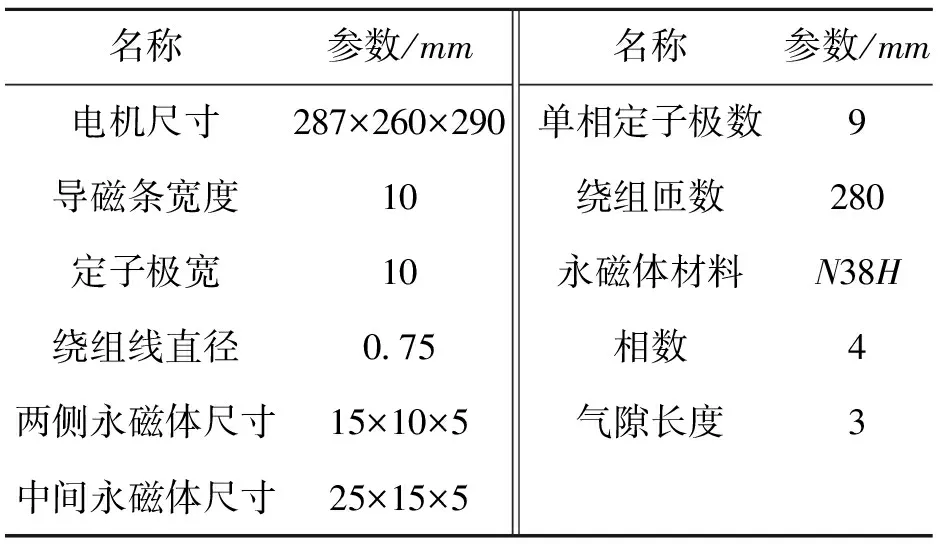
表2 新型横向磁通电机样机参数
为了便于两者进行比较,进行了对比实验,传统直接转矩控制系统转速和转矩实验如图6所示,空间矢量直接转矩控制系统的转速与转矩实验如图7所示。
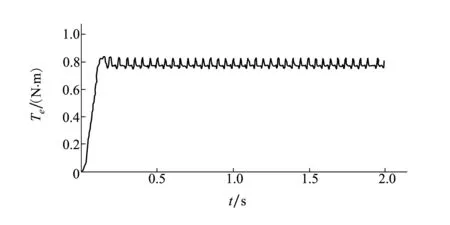
图6 传统直接转矩控制
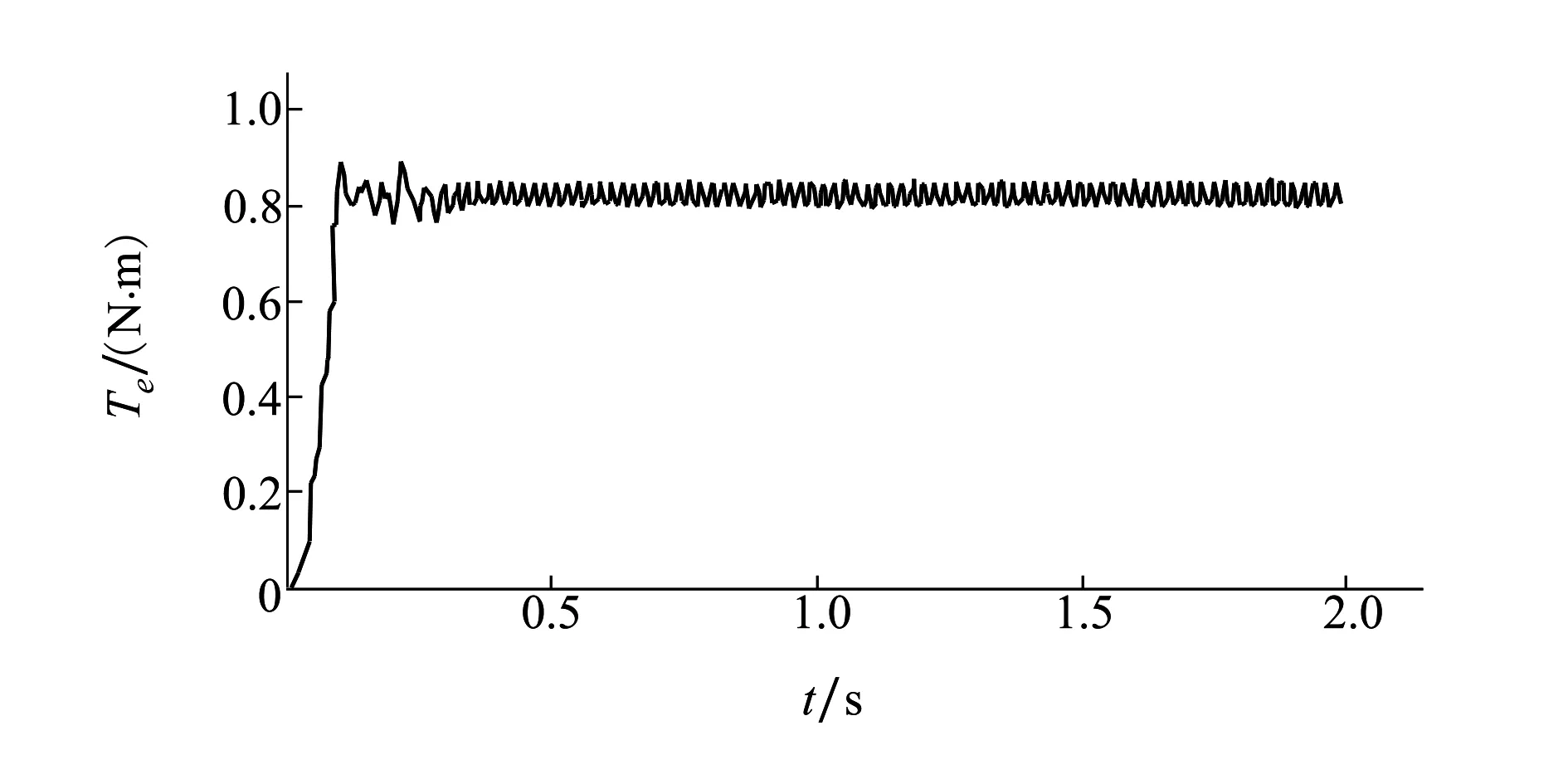
图7 空间矢量直接转矩控制
从实验波形看出,实验的波形符合电机的实际情况,表明了新型TFPM模型的正确性,传统直接转矩控制在电机稳定后转速波动较大,存在较大的转矩脉动,主要是电流谐波不稳定所致。而空间矢量直接转矩控制比传统直接转矩控制转矩脉动较小,转速较稳定,满足稳定输出转矩的需求,提升了电机的工作特性。
4 结 论
针对传统直接转矩控制在横向磁通永磁电机应用中的不足,本文提出一种改进的空间矢量直接转矩控制方法,并在电压矢量表中增加一个电角度周期内的电压矢量个数即增加系统对电机的控制频率,以削弱电流谐波,可有效地减小转矩脉动和磁链,使磁链和转矩得到完全控制。在构建的横向磁通永磁电机系统模型和样机本体的基础上,进行了传统直接转矩控制与空间矢量直接转矩控制的转速与转矩对比研究。实验结果表明,采用改进的空间矢量直接转矩控制,新型横向磁通永磁电机可以获得精确和平滑的转矩与转速,减小机械磨损,提高输出转矩性能,有利于横向磁通电机的广泛应用。
参考文献:
[1]InoueY,MorimotoS,SanadaM.ControlMethodSuitableforDirectTorqueControlBasedMotorDriveSystemSatisfyingVoltageandCurrentLimitations[C]∥2010InternationalPowerElectronicsConference, 2010: 3000-3006
[2] 赵艳娥,张建武,韩旭. 轮毂电机独立驱动电动汽车动力减振机构设计与研究[J]. 机械科学与技术,2008,27(3):395-398
ZhaoYane,ZhangJianwu,HanXu.DesignandStudyontheDynamicIc-DamperMechanismforaninWheelMotorIndividualDriveElectricVehicle[J].MechanicalScienceandTechnologyforAerospaceEngineering, 2008, 27(3): 395-398 (inChinese)
[3] 卢健康,王萑,王声钊. 三种平板式横向磁场永磁电机的电磁场有限元分析对比与实验研究[J]. 机械科学与技术, 2009, 28(9): 1135-1138
LuJiankang,WangHuan,WangShengzhao.ElectromagneticFiniteElementAnalysisandComparisonofThreeTypesofTransverseFluxPermanentMagnetMotorsandExperimentalResearch[J].MechanicalScienceandTechnologyforAerospaceEngineering, 2009, 28(9): 1135-1138 (inChinese)
[4] 金孟加,邱建琪. 基于新型定子磁链观测器的直接转矩控制[J]. 中国电机工程学报, 2005, 25(24): 139-142
JinMengjia,QiuJianqi.ANovelStatorFluxEstimatorforDirectTorqueControlledMagnetSynchronousMotorDrives[J].ProceedingoftheCSEE, 2005, 25(24): 139-142 (inChinese)
[5]PatelC,RamchandR,RajeevanPP.DirectTorqueControlSchemeofIMDrivewith12-SidedPolygonalVoltageSpaceVectors[C]∥14thEuropeanConferenceonPowerElectronicsandApplications, 2011: 1-11
[6]ZiaeinejadS,SangsefidiY.PerformanceAnalysisofDTCMethodsofTwo-PhaseInductionMotorswithDifferentInverterTopologies[C]∥3rdPowerElectronicsDriveSystemsandTechnologiesConference, 2012: 121-126
[7]SalehZiaeinejad,YounesSangsefidi.DirectTorqueControlofTwo-PhaseInductionandSynchronousMotors[J].IEEETransonPowerElectronics, 2012, 28(8): 4041-4050
猜你喜欢
大电机技术(2022年5期)2022-11-17
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
电机与控制应用(2022年4期)2022-06-27
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
弹箭与制导学报(2018年1期)2018-11-13
组合机床与自动化加工技术(2014年12期)2014-03-01
