
基于RBF网络补偿的近空间用BLDCM自适应模糊控制
2014-03-25 06:10雷金莉窦满峰
西北工业大学学报 2014年3期
雷金莉, 窦满峰
(1.宝鸡文理学院 电子电气工程系, 陕西 宝鸡 721007; 2.西北工业大学 自动化学院, 陕西 西安 710072)
近空间飞行器螺旋桨驱动系统以电池为能源,由高效高功率密度永磁无刷直流电机(BLDCM)、高性能控制器、高效逆变器及减速器组成[1]。近空间大气稀薄,BLDCM散热困难;温度、大气密度等环境参数变化会引起BLDCM参数摄动,造成BLDCM控制模型的不准确和参数失配,影响控制精度;电磁干扰、风速等不确定性变化会造成螺旋桨转矩扰动,引起BLDCM电流波动,破坏螺旋桨驱动控制系统的稳定性[2-3]。自适应模糊控制算法不需要系统的精确数学模型,可以很好地处理不确定性;算法中包含自适应调节参数,系统具有一定的自适应能力,已成功应用于BLDCM[4-5]、感应电机[6]、开关磁阻电机[7]、永磁同步电机[8]等运动控制系统。但自适应模糊控制算法复杂,对随温度变化缓慢改变的系统参数如定子电阻等可以起到很好的校正效果,而对于快速变化参数如定子电感和由不确定性扰动引起的负载转矩突变难以达到预期的控制效果。RBF网络是一种新型神经网络,具有自学习的功能,在处理控制系统的非线性、不确定性等问题上有很好的应用前景[9-10]。文献[11]将RBF网络应用于无刷直流电机无位置传感器控制;文献[12]采用RBF网络来模拟直线伺服系统的端部效应、参数变化、摩擦和外部负载等不确定因素,通过RBF网络的补偿控制来减弱滑模控制的“抖振”程度, 以提高系统的稳态精度。文献[13]构造了一个RBF网络对BLDCM系统进行在线辨识、建立在线参考模型, 由单神经元控制器完成控制器参数的自学习。文献[14]采用的RBF 网络以电机可检测的电压、电流作为输入,功率开关的导通状态作为输出,通过离线和在线相结合的方法对网络进行训练,实现了无刷直流电机无位置传感器直接电流控制。
为保证近空间BLDCM控制系统具有良好的动、静态性能,并能快速稳定地消除参数摄动和不确定性扰动因素的影响,借鉴上述文献中RBF神经网络的设计方法,本文提出了一种将径向基函数(RBF)神经网络控制和自适应模糊控制相结合的鲁棒控制方法。该控制方法利用RBF网络对近空间飞行器BLDCM参数摄动和不确定性扰动引起的转速误差进行在线辨识,并给出电流补偿信号来减小BLDCM转矩波动,消除控制系统的不稳定性,以达到快速鲁棒自适应控制的目的。
1 近空间BLDCM动态控制模型
近空间BLDCM的转速和电流强耦合,定子电阻、电感和转动惯量等参数不确定性摄动,螺旋桨负载特性不确定性扰动,因此,近空间BLDCM是一个复杂的不确定非线性系统。为了便于分析,假设近空间BLDCM定子三相绕组完全对称,电机气隙磁导均匀,磁路不饱和,不计涡流和磁滞损耗。近空间BLDCM定子绕组采用三相星形结构,则电磁转矩、负载转矩以及转速之间的关系如(1)式所示:

(1)
式中:J为转子转动惯量,ω为角速度,Te为电磁转矩,TL为负载转矩,Bv为阻尼系数,Te=keia,ia为A相绕组相电流。
把Te=keia代入(1)式,并对(1)式等式两边求导,整理得:
(2)
(3)
(4)
f(x)和g(x)中包含了BLDCM的摄动参数及负载转矩,f(x)和g(x)均为高阶非线性函数,BLDCM的参数摄动和不确定性负载扰动可由f(x)和g(x)体现。
2 近空间BLDCM控制系统
近空间BLDCM控制系统的结构框图如图1所示。控制器采用电流、转速双闭环结构,电流环采用PI调节器,转速环采用由自适应模糊控制器和RBF神经网络补偿控制器两部分组成。
本文控制算法的设计目标是:近空间BLDCM在参数摄动和负载扰动影响时,对于任意给定的参考转速ωr,且转速误差e=ωr-ω趋于零,电磁转矩波动尽可能小。
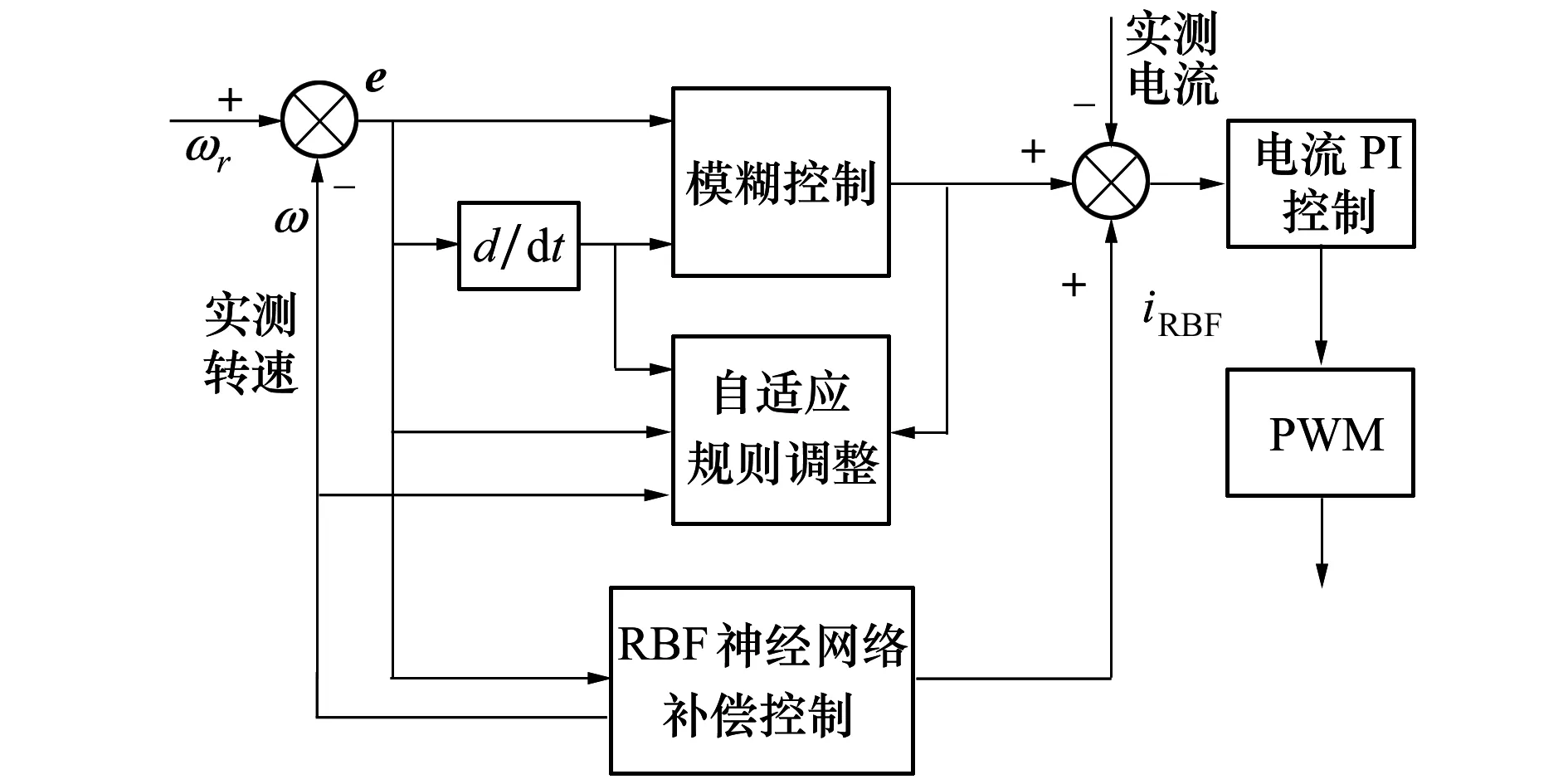
图1 基于RBF网络补偿的BLDCM自适应模糊控制器结构
3 自适应模糊控制算法设计及稳定性分析

(5)
3.1 模糊逻辑系统设计

(6)

当模糊规则推理采用模糊蕴含乘积推理规则时,IF…THEN…规则可由(7)式表述:
(7)
调查员委托每个自然村的村医作为协助者,在其协调下开展一对一、面对面的现场问答式入户调查。承诺问卷不做单份分析。本研究共发放1100份问卷,最终保留有效问卷941份,有效回收率为85.55%。无效问卷的剔除标准:被调查者配合度较差的、未完整作答的与反聩信息存在明显倾向性的。
(8)
(9)
3.2 自适应参数调整算法设计

(10)
(11)
(12)


(13)
可得转速误差方程
(14)
由于A为稳定矩阵,因此一定存在一个唯一的二阶正定矩阵P满足Lyapunov方程
ATP+PA=-Q
(15)
式中:Q为任意二阶正定矩阵。
选取Lyapunov函数为
(16)
式中:γ1>0,γ2>0。
对(16)式求时间导数可得
(17)
根据Lyapunov大范围渐进稳定性理论,要使自适应模糊控制器u(t)的闭环系统具有良好的性能,调整参数θf和θg的自适应律选为

(18)
(19)
3.3 稳定性验证
将(15)式、(18)式和(19)式代入(17)式可得
(20)
当自适应模糊控制闭环系统稳定时,则
(21)
式中,λmin(Q)为正定矩阵Q的最小特征值,选取正定矩阵Q时,使λmin(Q)>1。
对(21)式两边积分可得

(22)

lim|e(t)|=0
(23)
近空间BLDCM闭环控制系统具有全局稳定性,且当系统达到稳定状态时,转速误差趋于零。
4 RBF网络补偿控制器设计
RBF网络是一种单隐层的3层前馈神经网络,选择RBF作为隐含层节点的作用函数,输入矢量直接通过基函数映射到隐层空间,输出是隐层单元输出的线性加权。本文采用的RBF网络结构如图2所示。
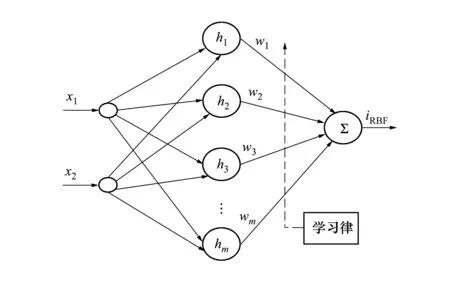
图2 RBF神经网络补偿控制器结构
(24)
给定隐层节点的初始中心向量ci(0)(i=1,2,…,q)、学习速率η、停止计算的阈值ε和动量因子α,样本学习算法如(25)式~(27)式所示
(25)
调整中心点
(26)
隐含层至输出层之间的连接权值的学习算法为:
(27)
当满足系统误差目标函数,学习过程结束。由此可得到RBF神经网络补偿控制器的控制量为
iRBF=WTh(x)
(28)
5 仿真研究
近空间BLDCM的参数为:额定电压U=270 V,额定功率P=1.5 kW,电枢绕组相电阻R=0.15 Ω,定子绕组的电感L=1.69 mH,变速比i=16,电机转动惯量JM=0.009 kg·m2。为验证所提控制策略的控制性能,分别采用具有RBF网络补偿的自适应模糊控制算法和自适应模糊控制算法进行了系统转速突变、负载转矩突变和转动惯量变大的模拟实验,如图3至图5所示。
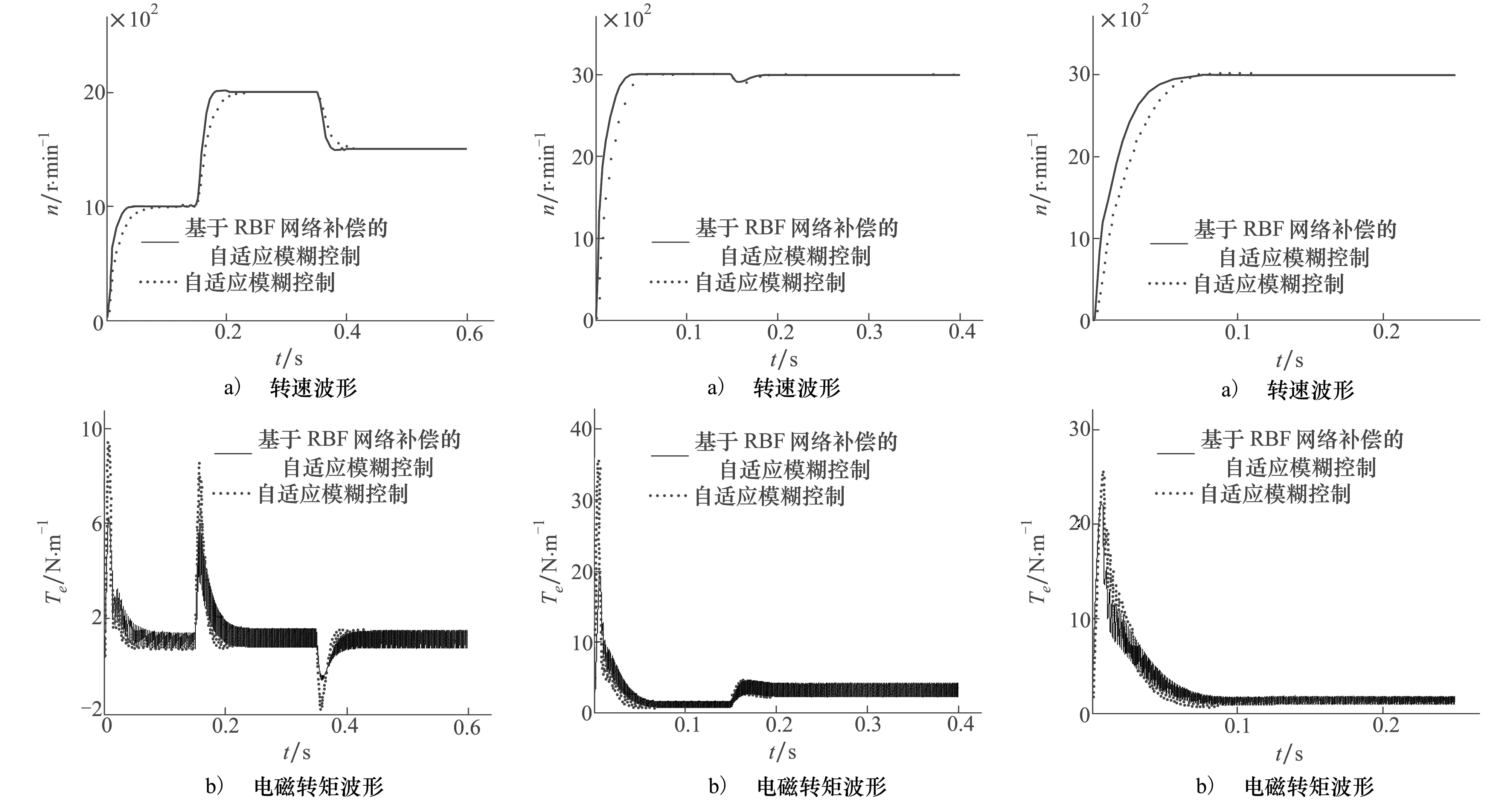
图3 转速奕变时的仿真结果 图4 负载转矩实变时的仿真波形 图5 转动惯量为0.013 kg·m2时的仿真波形
从图3可以看出,在BLDCM转速上升或下降时,RBF网络补偿控制器能快速补偿转速误差,响应时间比自适应模糊控制快约10 ms,电磁转矩的瞬时峰值减小了约30%;对比图4中的转速和电磁转矩曲线,负载转矩突变时,具有RBF网络补偿控制算法的响应时间较短;图5为转动惯量变大时的响应曲线,2种控制算法的转速和电磁转矩变化平稳,动态性能良好,有RBF的自适应模糊控制响应速度快,电磁转矩波动小;综合分析以上实验结果,基于RBF网络补偿的自适应模糊控制算法能快速消除电机参数摄动和负载扰动等不确定因素的影响,动静态控制性能优于自适应模糊控制算法。
6 结 论
近空间BLDCM是一个典型的不确定非线性系统,受工作环境影响,系统参数和负载特性会出现不确定性摄动。针对这一问题,本文提出了基于RBF网络补偿的自适应模糊控制算法。该算法是在自适应模糊控制算法保证EDS控制系统全局稳定性的同时,通过RBF神经网络对系统参数摄动和负载转矩突变引起转速误差进行在线辨识和动态补偿,实现参数摄动和不确定性扰动条件下的快速鲁棒自适应控制。模拟仿真实验表明在近空间BLDCM参数摄动和负载扰动时,基于RBF网络补偿的自适应模糊控制算法响应快、无稳态误差、无超调,具有较好的鲁棒性和自适应能力,控制性能明显优于自适应模糊控制。
参考文献:
[1] 罗玲,刘卫国,窦满峰,杨旭东. 高空飞艇螺旋桨驱动电机分析[J]. 宇航学报, 2009,30 (6) :2140-2144
Luo Ling, Liu Weiguo, Dou Manfeng, Yang Xudong. Analysis of the Motor Driving a Propeller of High Altitude Airship[J]. Journal of Astronautics, 2009,30(6): 2140-2144 (in Chinese)
[2] Schmidt D K. Dynamic Modeling of Control and Station-Keeping Guidance of a Large High Altitude near Space Air-Ship[R]. AIAA Guidance, Navigation, and Control Conference and Exhibit, AIAA-2006-6781
[3] Bricstrol E H. On a New Measure of Interaction for Multivariable Process Control[J]. IEEE Trans on Autom Control, 1966, 30(1): 133-134
[4] 纪志成,沈艳霞,薛花. 无刷直流电机自适应模糊控制的研究[J]. 中国电机工程学报, 2005,25(5): 104-109
Ji Zhicheng, Shen Yanxia, Xue Hua. Study on the Adaptive Fuzzy Control for Brushless DC Motor[J]. Proceedings of the CSEE, 2005, 25(5): 104-109 (in Chinese)
[5] Awadallah M A, Morcos M M. Switch Fault Diagnosis of PM Brushless DC Motor Drive Using Adaptive Fuzzy Techniques[J]. IEEE Trans on Energy Conversion, 2004, 19(1): 226-227
[6] Wai Rongjong, Su Kuoho, Tu Chunyen. Implementation of Adaptive Enhanced Fuzzy Sliding-Mode Control for Indirect Field-Oriented Induction Motor Drive[C]∥FUZZ′03: Fuzzy Systems, Missouri, USA, 2003
[7] Mir S, Islam M S, Sebastian T, et al. Fault-Tolerant Switched Reluctance Motor Drive Using Adaptive Fuzzy Logic Controller[J]. IEEE Trans on Power Electronics, 2004,19(2): 289-295
[8] 陈振锋, 钟彦儒. 嵌入式永磁同步电机自适应在线参数辨识[J]. 电机与控制学报, 2010, 14(4): 9-13
Chen Zhenfeng, Zhong Yanru. Online Adaptive Parameter Identification for Interior Permanent Magnet Synchronous Motor Drive[J]. Electric Machines and Control, 2010, 14(4): 9-13 (in Chinese)
[9] Jie Xiu, Shiyu Wang, Yan Xiu. Fuzzy Adaptive Single Neuron NN Control of Brushless DC Motor[J]. Neural Comput & Applic, 2013, 22: 607-613
[10] Ganesh C, Patnaik S K. Artificial Neural Network Based Proportional Plus Integral Plus Derivative Controller for a Brushless DC Position Control System[J]. Journal of Vibration and Control, 2012, 18(14): 2164-2175
[11] 夏长亮,文德,范娟,等. 基于RBF神经网络的无刷直流电机无位置传感器控制[J]. 电工技术学报, 2002, 17(3): 26-29
Xia Changliang, Wen De, Fan Juan, et al. Based on RBF Neural Network Position Sensorless Control for Brushless DC Motors[J]. Transactions of China Electrotechnical Society, 2002, 17(3): 26-29 (in Chinese)
[12] 孙宜标,郭庆鼎. 基于RBF神经网络补偿的直线伺服系统滑模鲁棒跟踪控制[J]. 控制理论与应用, 2004, 21(2): 252-256
Sun Yibiao, Guo Qingding. Sliding Mode Robust Tracking Control for Linear Servo System Based on RBF Neural Networks Compensation[J]. Control Theory and Applications, 2004,21(2): 252-256 (in Chinese)
[13] 文定都. 基于RBF神经网络辨识的无刷直流电动机控制实验研究[J]. 微电机, 2008, 41(10): 94-97
Wen Dingdu. Research on Control of Brushless DC Motors Based on RBF Neural Network Identification[J]. Micromotors, 2008,41(10): 94-97 (in Chinese)
[14] 夏长亮,王娟,史婷娜,等. 基于自适应径向基函数神经网络的无刷直流电机直接电流控制[J]. 中国电机工程学报, 2003, 23(6): 123-127
Xia Changliang, Wang Juan, Shi Tingna, et al. Direct Control of Currents Based on Adaptive RBF Neural Network for Brushless DC Motors[J]. Proceedings of the CSEE, 2003, 23(6): 123-127 (in Chinese)
[15] Wang L X. Fuzzy System Are Universal Approximators[C]∥IEEE International Conf on Fuzzy System, San Diego, 1992: 1163-1170
猜你喜欢
数学物理学报(2022年4期)2022-08-22
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
数学物理学报(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
数学物理学报(2019年4期)2019-10-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
