基于激光三角法反射式光路设计的小角度测量
2014-03-22 09:07周红锋宫爱玲
计量技术 2014年6期
周红锋 宫爱玲
(1.云南临沧师范高等专科学校,临沧 677000;2.昆明理工大学理学院,昆明 650093)
0 引言
小角度的测量,在精密测试、精密加工、航空航天和导航定位等方面具有重要的地位。传统的激光三角法测量中,检测器使用的测量光线一般是激光照射到被测物体表面的散射光和漫反射光[1],在反射式光路设计的实验系统中,则采用了被测物体的反射光进行测量,这在激光三角法测量应用中具有较好推荐价值和研究意义。
1 实验系统
1.1 反射式光路设计的基本原理[2]
在图1中,当被测平面板以O点为转轴转过一个微小角度a时,经物体表面反射的光线也会随之在CCD上发生移动。若令前后两次反射光线相交的夹角为β,则它们的几何关系为
β=2a
(1)
由图中的关系可得
tanβ=(b1-b0)/D
(2)
(3)

图1 实验原理图
根据式(3)可知,只要计算出平面板转动时激光的反射光斑在CCD上的位移(b1-b0),再测量出平面板转轴O到CCD的距离D,便可计算出此时平面板转过的角度a了。
1.2 实验光路及成像系统设计
在文献[2]中,分析了采用图1中所示光路测量存在的问题,探讨了改进方法。实验过程中,经过反复测试与思考,对文献[2]中的光路进行了优化改进,在入射光的光路上增加了准直仪,保证入射光线与分光计转轴的共面性,提高了实验系统测量的稳定性,实验光路结构如图2所示。

图2 实验光路图
图3是成像系统的原理示意图,当CCD相机视场中的测量光斑能在接收屏上清晰成像时,其横向缩放比K和纵向缩放比L分别为
K=w/W
(4)
L=h/H
(5)
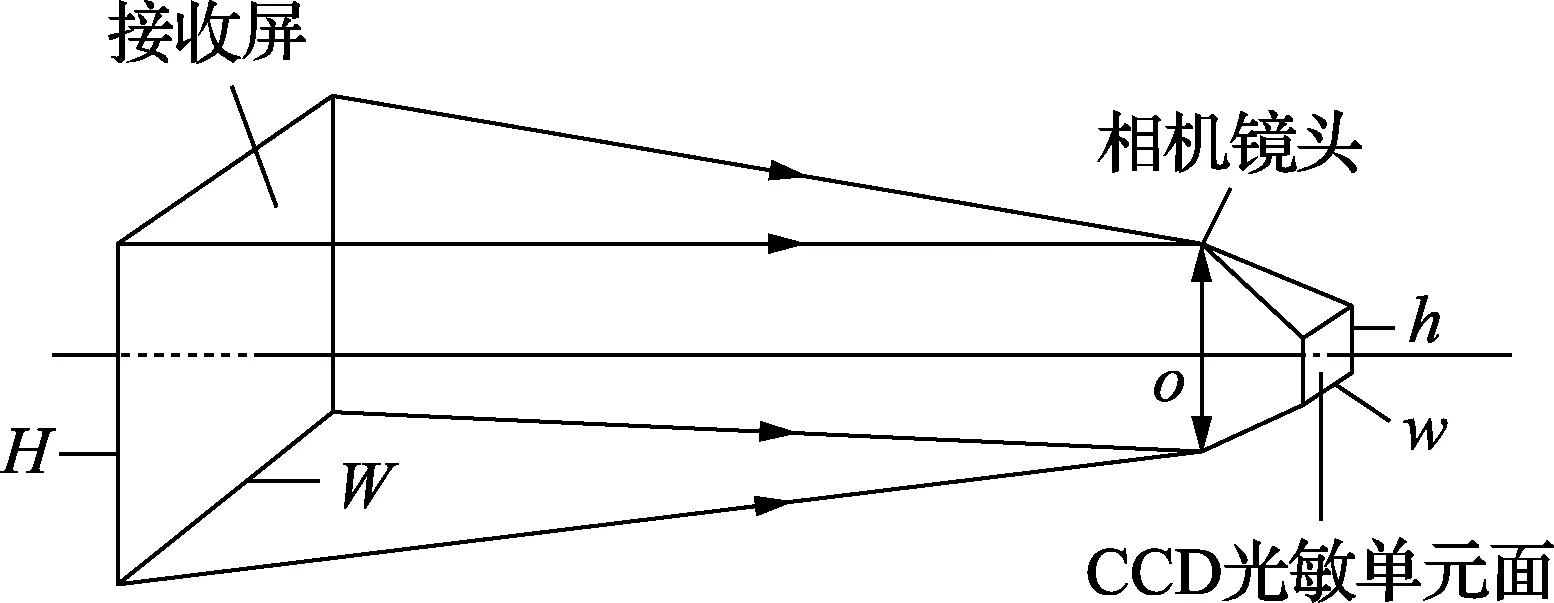
图3 成像系统示意图
式中,w、h为CCD光敏单元面的宽度和高度;W、H为CCD相机视场中接收屏的宽度和高度。
当图2中的平面镜转动一个微小角度时,接收屏上的测量光斑也随之移动,即式(3)中的(b1-b0)。为了计算这一微小位移的大小,只需计算出图像中CCD光斑中心的位移量,代入式(4)即可算出(b1-b0),再由式(2)、(3)便可算出平面镜在水平方向转过的微小角度。
1.3 实验系统调节
1)分光计调节。为了分析该系统的测量精度和误差,把其测量值与分光计的读数值进行对照,因而测量前需先调好分光计;
2)共面性调节。调节入射到待测平面镜的激光光束,使其入射点处于平面镜的转轴上,也就是使入射光线和分光计转轴同处于一个平面上。实际上,二者不共面所带来的误差很小,这将在后面部分进行分析和探讨;
3)成像系统调节。要严格满足式(4)、(5),就必须保证接收屏能在CCD相机视场中清晰成像,否则会导致测量误差。调节时,可以在接收屏上放置标尺,只要标尺能清晰成像,没有模糊和像差则可。
2 实验结果与讨论
实验中,只对平面镜在水平面内的转动角度进行了测量。测量范围以分光计的最大和最小读数之差为准;测量精度以CCD光斑图像的定位精度为一个像素进行计算;测量误差则是以分光计的读数作为真值,计算多次测量的平均误差。
He-Ne激光器主要参数:型号(JD-3-250),波长(0.6328μm) 光束直径(0.7mm);CCD相机的主要参数:型号(GE4000/GE4000C),分辨力(4008×2672),像素尺寸(9.0μm×9.0μm)。
2.1 不同距离时的测量范围、测量误差和测量精度
当待测物体(平面镜)与接收屏的距离D发生变化时,其测量范围、测量精度和测量误差也会随之变化。表1给出了视场中接收屏的宽度为W=12.3cm时,不同距离D情况下的测量数据(每一个D进行5次重复测量)。
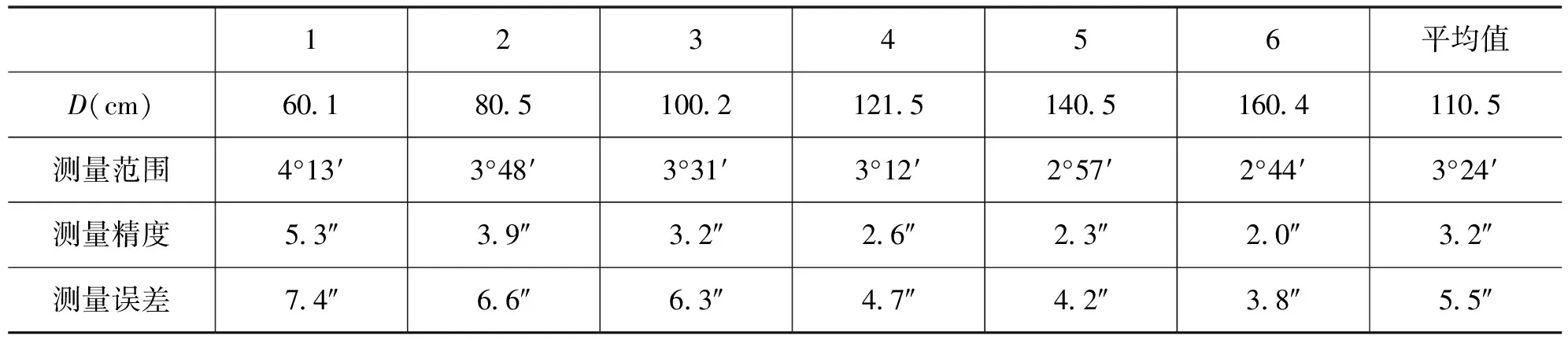
表1 不同距离D情况下的测量数据(W=12.3cm)
2.2 不同W时的测量范围、测量精度和测量误差
当调节CCD相机镜头时,其视场中接收屏的宽度W也随之改变,表2是当D=100.2cm时,不同W情况下的测量数据(每一个W进行5次重复测量)。
由表1、表2中的测量数据可知:在该实验参数条件下,测量范围在3°15′左右,测量精度为3.0″左右;测量范围和测量精度由D、W共同决定,二者的关系大致是反向变化的趋势,即:测量范围大时测量精度较低,测量范围小时测量精度较高,这与理论分析的结果一致。
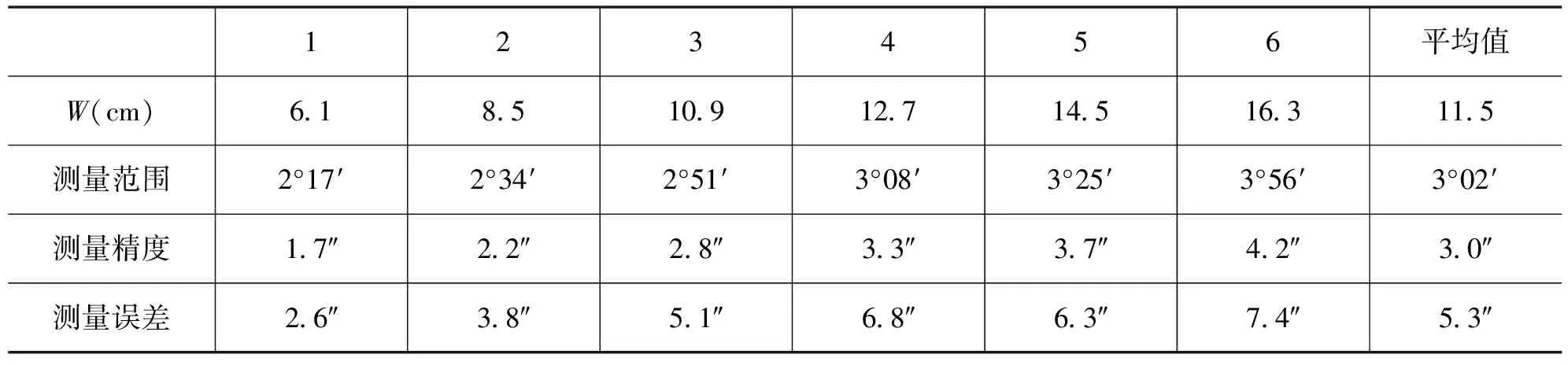
表2 不同宽度W情况下的测量数据(D=100.2cm)
从量值上说,当W发生变化时,测量范围和测量精度的变化较为迅速;当D发生变化时,测量范围和测量精度的变化较为缓慢,说明测量范围和测量精度对W的依赖程度比D的要高。因此,实验中保证CCD相机视场中接收屏的清晰成像这一环节很关键,调节成像系统时,要特别注意这一点;而在共面性调节中,调节误差所导致的测量范围和测量精度变化较小,一般可以不用考虑。至于测量误差,由于不具备对同一小角度进行重复性测量的实验条件,实验中是以分光计的读数作为真值,取5次测量的平均误差作为测量误差,只具有一定的参照意义。
由实验结果可以看出,该实验系统的测量范围和测量精度,可以根据测量中的实际需要进行动态的调节,这也是该实验系统最突出的特点之一。
3 测量范围、测量精度和测量误差分析
在该实验系统中,其测量范围、测量精度和测量误差主要由CCD相机的硬件参数和D、W的取值两个方面的因素共同决定。它们的关系如下:
1)CCD相机硬件参数方面:CCD相机的光敏单元面面积越大,测量范围越大;CCD相机的分辨力越高,像素尺寸越小,测量的误差越小、测量精度越高。
2)D、W的取值方面:W一定时,D越大,测量范围越小,测量误差越小、测量精度越高;D一定时,W越小,测量范围越小,测量误差越小、测量精度越高。
此外,在硬件设施和实验条件确定的情况下,应用数字图像处理技术,可以实现图像中CCD光斑中心的亚像素定位[3-4],从而减小实验系统的测量误差、提高测量精度。在计算测量精度时,是直接以CCD光斑中心的定位精度为一个像素进行计算的,如果按照文献[4]中的1/10个像素或者文献[3]中的1/40个像素的定位精度进行计算,其测量精度可以达到十分之秒(0.4″左右)甚至是百分之秒(0.07″左右)的数量级,测量精度将大大提高。
4 结束语
实验表明,基于激光三角法反射式光路设计的实验系统实现了小角度的高精度测量,其测量范围和测量精度也可以进行动态的调节。在小角度的测量中,该方法具有一定实用价值和较好的研究意义。
[1]胡庆英,尤政,罗维国.激光三角法在几何测量中的应用.宇航计测技术,1994,16(2):10-15
[2]周红锋 王东云,等.激光三角法测量小角度的测量模型和光路设计研究[J].云南民族大学学报,2008(3):277-279
[3]金锦耀,张之江.视觉坐标测量中特征点成像中心的计算[J].计量技术,2003 (6):3-5
[4]周红锋,宫爱玲.图像中CCD光斑中心的亚像素定位研究[J].计量技术,2007 (11):21-23
[5]蒋本和,等.用激光准直及CCD检测的小角度测量系统.激光与红外,1998,28(4):233-234
[6]湛廷政,吕海宝.CCD细分技术方法研究及应用.光学学报.2002,22(11):1395-1399
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
应用数学(2020年2期)2020-06-24
进出口经理人(2017年9期)2017-09-22
科教导刊(2017年4期)2017-03-27
物理通报(2016年9期)2016-09-20
兵器装备工程学报(2016年5期)2016-06-15
动力工程学报(2016年3期)2016-04-19
电测与仪表(2015年18期)2015-04-12
淮南师范学院学报(2015年3期)2015-03-22
雷达学报(2014年4期)2014-04-23