磁流体的性质对压差传感器输出性能的影响
2014-03-22 01:04郝瑞参李德才刘华刚
仪表技术与传感器 2014年8期
郝瑞参,李德才,刘华刚,龚 雯
(1.北京电子科技职业学院机械工程学院,北京 100176;2.北京交通大学机械与电子控制工程学院,北京 100044)
0 引言
磁流体是近几年国际上研究较热门的新型功能材料之一,也是目前常温下唯一存在的液态磁性材料。这种材料兼具有磁性和流动性,决定了它在很多领域都有广阔的应用前景[1-3]。压差传感器即是其有潜力的重要应用之一[4-6]。
磁流体压差传感器属于变介质电感传感器,其原理是通过改变磁流体在螺线管内的体积分数来改变螺线管的电感参数及电路的输出,从而实现被测量向可测量的转化。其中,磁流体作为一种传感介质,其性能对压差传感器的输出起着至关重要的作用。
磁流体的性质由密度、黏度、磁化强度等参数来表征,文中即通过实验测量磁流体各参数,并将磁流体应用于压差传感器进行实验,最终得出磁流体的密度、黏度和磁化强度等因素对磁流体压差传感器的灵敏度及响应时间等参数的影响。
1 实验前准备
将传感器的输入输出公式[7]简化后得磁流体压差传感器的输出电压与磁流体各参数之间的理论关系为
(1)
式中:Uo为最终测得的输出电压;Ui为输入电压;ρm和μm分别为磁流体的密度和磁导率;μ0为空气磁导率;l为螺线管长度;Δp为输入压力差。
实验时采用电源的输出电压峰峰值为22.6 V,频率为25 kHz,磁场强度为100 Oe(1 Oe=79.578 A/m)。该实验采用化学共沉淀法制备了4种不同的磁流体,供设计的磁流体压差传感器进行实验。下面分3组进行实验并分析磁流体各性能参数对传感器输出参数的影响。
2 磁流体密度对传感器输出参数的影响
利用化学共沉淀法制备4种不同密度的磁流体,表1为测得磁流体的密度值和黏度值。
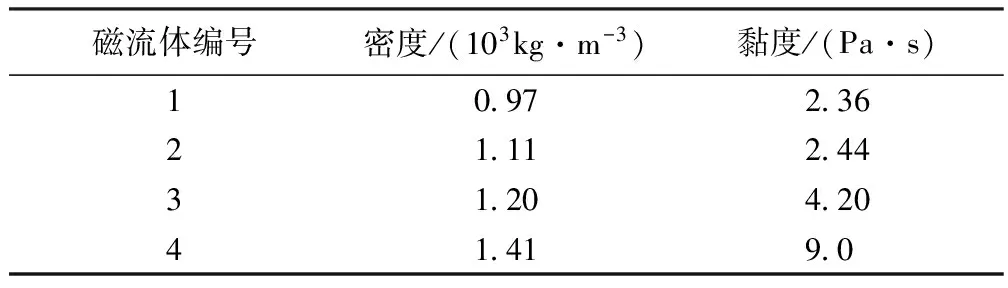
表1 实验用磁流体的密度和黏度
分别取以上4种磁流体作为传感介质进行实验,得出磁流体压差传感器的灵敏度与磁流体密度之间的关系,如图1所示。
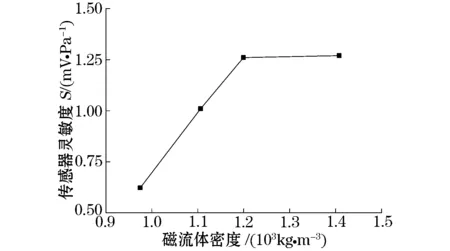
图1 压差传感器灵敏度与磁流体密度的关系
由图1可见,随着磁流体密度的增大,磁流体压差传感器灵敏度曲线先呈线性增加后趋于平缓。因此,通过增加磁流体密度而增加传感器灵敏度的方法是有限的。这是由于磁流体的磁导率随密度增大先迅速增加后又逐渐趋于恒定,导致传感器的输出随着密度的增大先增加后趋于平缓。对于该实验,选择密度为1.2×103kg/m3的磁流体比较合适。
3 磁流体的黏度对传感器输出的影响
随着磁流体内部磁性颗粒浓度增大,磁流体磁化强度逐渐增大,但与此同时,磁流体的黏度也逐渐增加,进而影响传感器的动态响应特性。因此,在磁流体的密度和磁化强度大到一定程度时,必须考虑磁流体的黏度对压差传感器输出的影响。
当磁流体黏度不大时,在管道内流动可作为无黏性不可压缩流体处理,其层流状态的运动可以用欧拉方程组[8]描述。当磁流体的黏度增大到不能忽略时,假设磁流体为均质不可压缩的各向同性牛顿流体,通过计算得到磁流体的管中流动速度分布式为
(2)
式中:u为磁流体在管道中某一点的流速;p为单位长度上的压降;ηm为磁流体的黏度;r为液体中的一点在管道中的坐标;r0为管道半径。
由式(2)可见,磁流体的黏度越大,流动速度越小,传感器的动态响应就越差。可见磁流体的黏度是影响磁流体压差传感器的动态响应特性的一个关键因素。 利用黏度仪测量所制备的实验用磁流体,其黏度参数见表1。
通过实验得出磁流体压差传感器的输出响应时间与磁流体黏度的关系,见图2。

图2 压差传感器响应时间与磁流体黏度之间的关系
由图2可见,随着磁流体的黏度逐渐增大,磁流体压差传感器的动态响应时间逐渐增大。因此,在进行磁流体压差传感器设计时,在保证其他参数正常的情况下,要尽量选择黏度低的磁流体,以保证传感器的动态响应特性。
4 磁流体的磁化强度对传感器输出的影响
磁流体最重要、最具特色的物理性质就是它的磁化性能[9],磁流体内固体颗粒的磁化是磁畴旋转造成的。磁流体的磁学性质可用朗之万的顺磁性经典理论来描述。磁流体的磁化曲线通过原点,没有剩磁,没有矫顽力,即Br、Hc均为0。图3所示为实验测量得到的4种磁流体的磁化曲线,均通过坐标原点,没有磁滞现象。

图3 实验用磁流体的磁化曲线
图4所示为实验测得磁流体磁化强度对压差传感器灵敏度的影响曲线。可见开始随着磁流体磁化强度增加,磁导率增加,使压差传感器输出电压急剧上升;但是随着磁流体的磁化强度逐渐趋于饱和,其密度却还在继续增大,从而导致压差传感器的输出降低,灵敏度下降。

图4 传感器灵敏度与磁化强度的关系
5 结论
(1)虽然磁流体压差传感器的输出与磁流体的密度成反比,但由于磁流体磁导率随密度增大先迅速增加后又逐渐趋于恒定,导致传感器的灵敏度随着密度的增大先增加后趋于平缓。
(2)磁流体的管流速度与磁流体的黏度成反比,故磁流体压差传感器的动态响应性能与磁流体的黏度成反比,即随着磁流体黏度的增加,磁流体压差传感器的响应时间会延长。
(3)磁流体压差传感器的灵敏度在一定范围内随着磁流体的磁化强度增大而增大。磁流体的磁化强度增大,即磁流体磁导率增大,从而使压差传感器的输出电压增大。可见磁流体的磁化强度至关重要,对压差传感器的输出性能影响最大。
参考文献:
[1]OLARU R,DRAGOI D D.Inductive tilt sensor with magnets and magnetic fluid.Sensors and Actuators A:Physical,2005,120(2):424-428.
[2]HAO R C,LI D C.Theoretical and experimental study on magnetic-fluid-based flow sensors.Chinese Science Bulletin,2011,56:1844-1847.
[3]ANDO B,BAGLIO S,BENINATO A.Sensors Based on Magnetic Fluids.Lecture Notes in Electrical Engineering,2014,162:277-281.
[4]POPA N C,SIBLINI A,JORAT L.Influence of the magnetic permeability of materials used for the construction of inductive transducers with magnetic fluid.Journal of Magnetism and Magnetic Materials,1999,201:398-400.
[5]POPA N C,SIBLINI A,JORAT L.Aspects concerning the dimensioning of the inductive transducers with magnetic fluids.Journal of Magnetism and Magnetic Materials,2002,242-245:1240-1242.
[6]杨文荣,王菲,刘剑飞,等.磁性液体微压差传感器校准信号源的研究.仪器仪表学报,2011,32(4):801-806.
[7]郝瑞参.差动式磁性液体微压差传感器数学模型及实验验证.机械工程学报,2010,46(12):161-165.
[9]徐贵英,张莉,李干佐.表面活性剂吸附对固/液分散体系稳定性的影响.日用化学工业,1997:356-359.
猜你喜欢
山东冶金(2022年2期)2022-08-08
化学工程师(2022年7期)2022-08-02
物理之友(2022年1期)2022-04-19
润滑与密封(2021年9期)2021-11-04
防爆电机(2021年3期)2021-07-21
四川大学学报(自然科学版)(2020年5期)2020-09-23
安徽农业科学(2019年4期)2019-06-11
电子制作(2019年9期)2019-05-30
数学物理学报(2019年1期)2019-03-21
物理教学探讨(2014年7期)2015-01-12