
武广高铁定位器坡度算法研究①
2014-03-22 10:23:06李丰良年晓红
铁道科学与工程学报 2014年2期
常 丽,李丰良,年晓红
(1.中铁咸阳干部管理学院,陕西咸阳712000; 2.中南大学土木工程学院,湖南长沙410075; 3.中南大学信息科学与工程学院,湖南长沙410075)
定位器是电气化铁路接触网定位装置的关键部件之一,它对电力机车能否安全提速和高速运行起着至关重要的作用[1-2]。为了保证弓网运行安全,定位器的安装坡度非常重要。安装坡度过小,则可能发生受电弓与定位器碰撞,安装坡度过大,则要减少拉出值或加大第一吊弦距定位点的距离。减小拉出值会加速受电弓的不均匀磨耗,增大第一吊弦距定位点的距离会影响弓网受流质量,所以必须合理确定定位器的坡度[3]。以武广高铁接触网定位器倾角的确定过程为例说明其设计原理,以便为今后高速铁路接触网设计优化提供参考。武广高铁的接触网是引进德国DB公司的软件进行设计的。DB公司不提供软件的设计计算原理,只要求输入现场数据,便可以输出接触网上每一个零部件的安装参数。由于接触网各处的地形地貌和跨距长短等诸多因素都不尽相同,因此,DB公司的设计软件计算出的每一组腕臂、每一根吊弦和每一个定位器的安装参数都是不同的。
2009年12月,武广高铁开通以后,相继出现了多起弓网故障。供电段在进行现场维修时,由于不知道接触网的设计计算方法,各个零部件的安装参数又是不同的,因此在故障恢复时曾遇到很多困惑。2010年5月25日,武广高铁发生了一起定位器打弓故障,造成多架受电弓被打坏,并影响到了武广高铁的正常运行。铁道部要求对武广全线的所有定位器进行逐一排查。结果发现:定位器的坡度各不相同,多数定位器的坡度在4°~5°之间,但有的定位器的坡度为0,有的定位器的坡度甚至还是负的。是不是定位器的坡度设计有问题?定位器的坡度究竟应该多大才合理?DB公司的接触网设计软件究竟是如何计算接触网的参数的。只有弄清这些问题,才能减少接触网日常维护的盲目性,才能为进一步优化设计提供理论基础。本文将我们对DB公司推算方法整理发表,以便给现场维护人员和接触网设计人员提供参考。
1 定位器的力学模型
根据接触网上使用的定位器,可以画出如图1所示的受力图。其中,O点的2个力是支撑杆的力;W是定位器(含线夹)的重力,作用在质心上;A点水平力FAx是接触导线的水平力,由接触导线的张力决定;A点的垂向力FAy是接触导线的垂向力,由接触导线的重力决定。在高铁上,广泛使用L-1150型定位器。作者实测了该定位器的参数,用于推算DB公司的定位器倾角参数。L-1150定位器的实测参数为:W=16.97(N),LA=1150(mm),Lc=680(mm),LB=60(mm)。测试过程中,定位销上安装有线夹。图1是定位器的受力图,图2是接触网给定位器的水平力及其几何关系。
定位器在上述力系的作用下平衡,承受平面一般力系,可写出力矩平衡方程[4]如下:


定位器的质心坐标和重力可以精确测定。只要定位器上A点的2个力FAx和FAy足够准确,利用式(2),就可以计算出定位器的倾角。
2 定位器A端水平力FAx的确定
定位器上的水平力FAx是由接触导线的张力和定位点处的拉出值共同决定的。图2是接触线与定位器的连接处在水平方向的受力图。图中:T为接触导线的张力;FAx为接触定位器A端的水平力; L1和L2为跨长;LCH为拉出值。
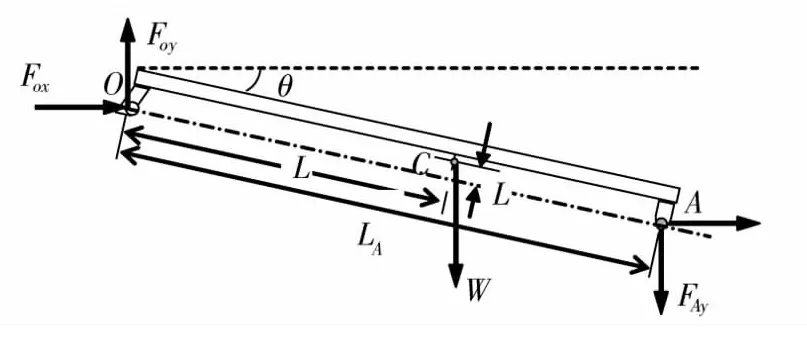
图1 定位器受力图Fig.1 Force diagram of the registration arm
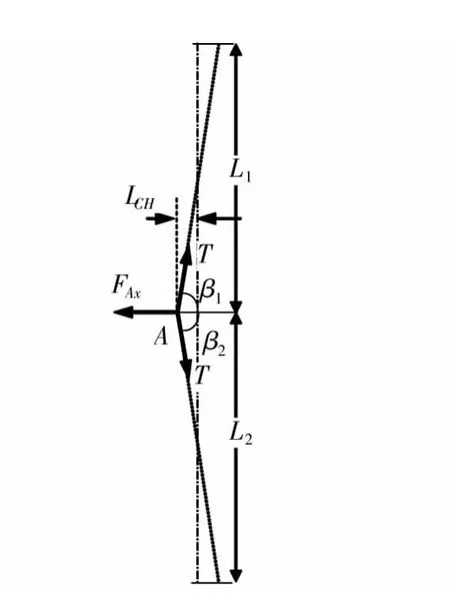
图2 定位器A端水平方向受力图Fig.2 Force diagram of the end A of the egistration arm in horizontal direction
容易得到:
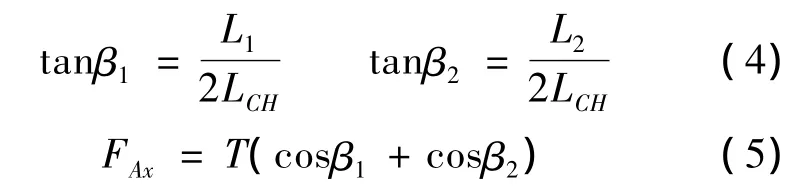
如果知道支柱前后的跨长L1,L2和T,就可以用式(4)算出β1和β2,再由式(5)计算出FAX。武广高铁上,接触导线的标称张力为30 kN,在直线区段,基本跨距L为50 m,拉出值LH为0.3 m。由式(4)~(5)可以算得:FAx=720 N。
3 定位器A端垂向力FAy的确定
武广高铁接触网设计的基本要求之一是无弛度。要做到这一点,定位器A端所受的垂向力必须满足一定的要求。设轨道水平,接触导线也水平。在接触网上任取1小段接触导线OA,其中O点为接触导线的1个悬挂点,例如定位器一侧的吊弦;A点为另1个悬挂点,例如定位器等。其受力图如图3所示。
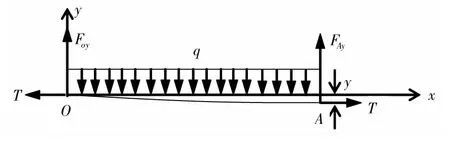
图3 一小段接触导线受力图Fig.3 Force diagram of a piece of contaitwire
图中:T为接触导线的张力;Foy和FAy分别是O和A点的垂向力;q为接触导线单位长度的质量;y为A的弛度。讨论接触导线无弛度的条件,相当于求解A点y值等于0的条件。
由静力学平衡方程[4]

得
令y=0,得

若A点的垂向位移不等于0,则A点的垂向力

实际使用时应注意上式中仅讨论定位器一侧的导线,因此FAY也只是定位器垂向力的一半。武广高铁采用弹性链型悬挂,定位器两侧的吊弦间距是8 m,如果要求定位器的悬挂点无弛度,则要求定位器的提升力等于4 m接触导线的质量。武广高铁接触导线的质量是1.337 kg/m。由此可算得
4 m接触导线的重力 =1.337×9.81×4= 52.463 88 N
当定位器A端的垂向力等于52.46388(N)时,就能保证接触导线在定位器附近是平直的。小于这个值,则有可能造成定位器附近接触导线下垂,使一跨内的接触网形成正弛度。大于这个值则有可能造成定位器附近的接触导线抬高,使一跨内的接触网形成负弛度。

图4 DB公司接触网检测车的弓网接触力检测波形Fig.4 Waveform of contact force in Pantograph-ocs system measured by DBAG
然而,DB公司的设计软件并没有严格使用这个参数,它采用的方法是将定位点的接触导线向上提升71.28×10-3mm,其垂向提升力是53.64 N左右。71.28×10-3mm,这么小的位移现场无法测量。但没有这一参数就不能准确地计算出DB公司的给定结果。为什么会这样做?可能是DB公司考虑了定位点的动态影响后作出的一点修正。图4是我国沈阳铁路局购买的DB公司的接触网检测车在120 km/h检测的弓网接触力波形。可以看出跨中的接触力大,支柱的接触力小。进一步的高速弓网动态仿真波形如图5所示,是350 km/h的弓网接触力仿真波形。为了便于分析接触力的变化规律,图中曲线做了滤波处理。
可以看出:支柱处的接触力除了具有比跨中处小的特性外,定位器还与受电弓有一个小小的撞击。定位点的这一特性使得受电弓在通过定位点时不但容易产生离线,而且容易产生弓网撞击。高速试验时可以看到受电弓在通过定位点时会产生有规律电火花,应当就是这个原因。为了减少定位点的硬点效应,将定位点向上提升一点将是有利的。
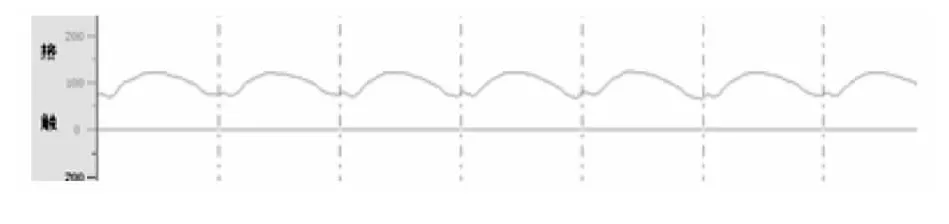
图5 弓网动态接触力计算机仿真波形Fig.5 Simulated waveform of contact force in Pantograph-CCS system
图6是DB公司给出的武广高铁上公里标为1 683 200.61~1 684 516.14 m的腕臂支撑计算数据,正好是一个锚段。其中支柱号为65~69和119~127位于锚段关节,其余定位器位于正线上。

图6 DB公司给出的接触网计算结果Fig.6 Calculation result derived by DB AG
65号和123号定位器的拉出值是150 mm;67号和127号定位器的拉出值是750 mm,其余定位器的拉出值都是300 mm。本文的目的是准确地找到位于正线上的定位器71~119号定位器的倾角设计方法,其余偏离正线的定位器倾角都是无关紧要的,不再讨论[5]。
第1步:由图6轨道里程栏中的2个相邻支柱的里程相减,得2个支柱之间的跨距。例如,69号支柱与71号支柱之间的跨距是49.97 m,71号支柱与73号支柱之间的跨距是51.73 m。
第2步:将2个跨距L1和L2以及定位器的拉出值0.3 m代入式(4),得β1和β2。
第3步:将β1和β2以及接触线的张力T=30 kN代入式(5),即可得到71号定位器A端的水平力等于708 N。这个力就是图6中71号支柱“接触线·径向力”所对应的数值。
第4步:令定位点的垂向位移为71.28×10-3mm,代入式(7),注意到武广高铁接触线的质量是1.337 kg/m,OA长4 m,T=30 000 N,可以得到FAy=53.531 9 N。
第5步:将FAx和FAy以及定位器的参数代入(2)式,即可得到定位器的倾角为8.99%。这就是图6中“定位器倾斜度”栏中71号定位器的数值[6]。
重复上述5个步骤,即可准确地计算出每一个定位器的坡度。在这个过程中,计算出的每个定位器的倾斜度以及其径向力,都与图6中相应栏中的数据完全一致。这说明本文的计算方法是完全可靠的。
4 结论
(1)将定位点提升71.28×10-3mm,有着多方面的考虑。一方面,高铁设计理念是不带预留弛度计算,即接触导线的每一个悬挂点,如吊弦,定位器等,到轨道平面的距离都应当相等,因此,定位点的提升量不能过大。另一方面,定位点的提升量关系到受电弓的包络线。因此,提升量不能过小。
(2)计算结果表明:如果没有定位器的提升,接触导线定位点相对于2侧吊弦的弛度是3.5 mm。DB公司确定向上提升71.28×10-3mm既可以保证高铁接触线各点平顺度不超过5 mm的限制,又可以保证定位器在受电弓的包络线之外,还可以减轻弓网之间的冲击,是一个经过多方面考虑之后的优化参数。
(3)虽然武广高铁接触网采用德国DB公司的软件进行设计,但武广高铁接触网的许多基本参数与德国的Re系列接触网的参数并不相同。例如,我国高铁的接触网基本跨距是50 m,德国接触网的基本跨距是65 m;我国接触网定位器与第一吊弦之间的距离是4 m,德国接触网是5 m等。我国的高铁接触网是在综合了许多国家的高铁接触网参数,经过一系列的试验之后确定的。这说明接触网的优化设计是一个永恒的课题。本文只推导了平直线路上的定位器坡度计算方法。在曲线轨道上,定位器的坡度有可能为0,也有可能为负。但它们相对轨道平面的倾角都是4°~5°。
[1]段汝娇,赵伟,黄松岭,等.基于计算机视觉的接触网定位器倾斜度自动测量方法[J].中国铁道科学,2011 (7):82-86.DUAN Rujiao,ZHAO Wei,HUANG Songling,et al.Automatic measurement method of the catenary localizer slope based on computer vision[J].China Railway Science,2011(7):82-86.
[2]隋延民,接触网定位器坡度计算机定位安全措施[J].铁道工程学报,2011(4):75-78.SUIYanmin.Calculation of steady arm grade and registration safetymeasure[J].Journal of Railway Engineering Society,2011(4):75-78.
[3]罗健,白裔峰,魏博.高速铁路接触网定位器坡度问题的深化研究[J].铁道工程学报,2013(1):76-80.LUO Jian,BAIYifeng,WEIBo.Deep study on slope of registration arm of catenary of high-speed railway[J].Journal of Railway Engineering Society,2013(1):76-80.
[4]哈尔滨工业大学理论力学教研室.理论力学[M].北京:高等教育出版社,2009.Teaching and Research Section of theoreticalmechanics of Harbin Institute of Technology.Theoretical mechanics[M].Beijing:Higher Education Press,2009.
[5]于万聚.高速电气化铁路接触网[M].成都:西南交通大学出版社,2003.YUWangju.The overhead contact line of high speed electric railway[M].Chengdu:Southwest Jiaotong University Press,2003.
[6]钱立新.世界高速铁路技术[M].北京:中国铁道出版社,2002.QIAN Lixin.High speed railway technology in the world[M].Beijing:China Railway Press,2002.
猜你喜欢
电气化铁道(2023年6期)2024-01-08 07:45:48
国防交通工程与技术(2022年6期)2022-02-17 05:14:41
保健医苑(2021年9期)2021-09-08 14:38:06
铁道通信信号(2020年6期)2020-09-21 09:23:14
测控技术(2018年8期)2018-11-25 07:42:30
电气化铁道(2018年4期)2018-09-11 07:01:38
金色少年(奇趣科普)(2017年4期)2017-06-05 15:03:46
电气化铁道(2016年4期)2016-04-16 05:59:44
铁道科学与工程学报(2015年5期)2015-12-24 12:12:04
铁路通信信号工程技术(2014年6期)2014-02-28 16:58:24
