基于边缘检测传感器的挡风玻璃轮廓跟踪技术研究
2014-03-21 12:23:25周盛明周自强戴国洪
仪表技术与传感器 2014年5期
周盛明,周自强,戴国洪
(1.苏州大学机电工程学院,江苏苏州 215000;2.常熟理工学院机械工程学院,江苏常熟 215500;3.苏州市报废汽车绿色拆解与回收智能装备重点实验室,江苏常熟 215500)
0 引言
报废汽车的玻璃如果简单的作为垃圾填埋处理,会造成很多社会污染和资源浪费[1]。国内外都还没有报废汽车挡风玻璃的自动化、智能化拆解设备,主要是对报废汽车进行破碎处理或者对挡风玻璃进行人工拆解。目前,一项新的自动化技术正在研究以用于挡风玻璃的整块拆解。
如图1所示,为专门设计的探测玻璃轮廓的跟踪采集机构,跟踪机构由利用步进电机驱动的三轴滑台和机架组成,可以实现三维坐标内的自由移动,机架上布有多个孔用来固定挡风玻璃。在主探测滑台上安置专用传感器,通过跟踪机构及采集机构的协调运动,就可以探测出汽车挡风玻璃边缘轮廓的数据点,系统原理图如图2所示。然后根据采集到的数据点拟合出轮廓轨迹,最后进行自动化拆解。
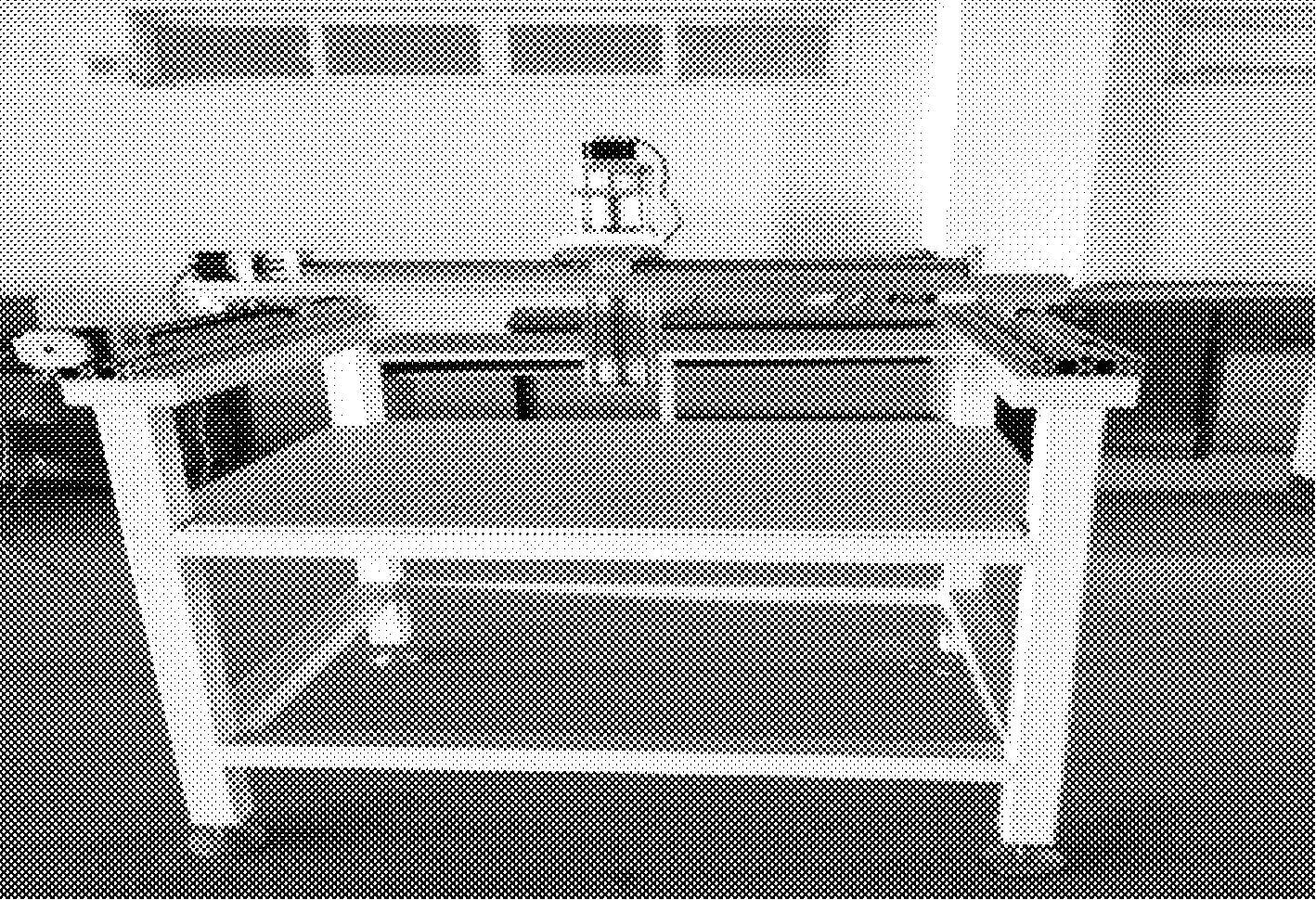
图1 跟踪机构

图2 系统原理图
1 运动控制
轮廓跟踪控制系统的硬件主要由步进电机驱动器、开关电源、运动控制卡及PC机组成。运动控制卡iMC2613P具有6轴控制功能,以及16个全局通用的输入输出I/O,每个I/O可单独配置,此外还可输出2个独立的指示信号,用于对PLC等外部设备进行触发、开启、同步等。跟踪机构利用VB进行运动控制的过程中,需要先设置原点,然后各轴分别以其原点为参考进行运动。原点的搜寻方式有多种,主要分为仅使用原点开关或编码器及两者同时使用等方式。然后利用VB进行点动控制,可以实现跟踪机构各轴的正、负方向移动,还可以调整移动速度,获取及导出点坐标。最后利用点动获取的挡风玻璃边缘轮廓的坐标数据,对跟踪机构进行自动运行控制,同时显示出各轴的速度及坐标信息,运动控制界面设计如图3所示。

图3 运动控制界面
2 数据采集
2.1边缘检测传感器
轮廓位姿信息的检测需要用专用的接触式轮廓检测传感器,它是一种工业机器人的执行器,如图4所示。在跟踪机构Z轴的末端安装该传感器,它跟随跟踪机构沿着挡风玻璃轮廓运动,并检测挡风玻璃轮廓的位置。根据传感器检测到的信息,传送至上位机处理之后,调用运动控制卡控制跟踪机构的动作。该传感器由行走检测、边缘检测、信号处理三部分组成,行走检测部利用测针对传感器是否与挡风玻璃表面接触进行判断,边缘检测部利用电感测头来确定传感器沿着玻璃表面的动作方向,信号处理部对边缘检测部及行走检测部的信息进行放大与转换,然后传至单片机进行处理,并通过输出端口连接至控制系统。

A—接触式探针;B—非接触探头
2.2传感器工作原理
边缘检测传感器由机械和电子部分组成,是典型的机电一体化结构。探测的原理采用接触式和非接触式相结合的方式,机械结构部分由一个装有红宝石探头的接触式探针和围绕它分布的相隔90°的4个探头组成。传感器采用电感式传感器,接触式探针用来接触挡风玻璃带有突起弧度的表面,测针A首先接触挡风玻璃表面,由于表面凸起的弧度,测针会向内收缩一点,上面的触盘与传感器触头断开,则单片机采集到该信号。根据中心探针反馈给单片机的信号,控制传感器的移动至挡风玻璃边缘位置进行探测。4个探头能够感应到金属信号,根据传感器在挡风玻璃边缘的不同位置,4个探头反馈的信号是不一样的,根据信号,控制传感器沿着挡风玻璃轮廓移动,一边移动传感器一边记录传感器的位置信息,经过单片机处理后传送至上位计算机。传感器工作原理如图5所示。

图5 传感器工作原理
传感器开始进行挡风玻璃边缘轮廓检测时,电感测头的线圈和内部电路形成一个回路,当测头接触到金属表面时,该回路会失去平衡从而停止工作,传感器内部的单片机被触发对该信号进行采集。如图6所示,4个电感测头分别位于不同的位置,当1号测头接收到金属信号,而其余测头没有信号时,传感器位于挡风玻璃边缘位置。当1、2、4号测头接受到信号时,则传感器越过了挡风玻璃边缘位置,需要向下移动传感器直到只有1号测头有信号为止。转弯时,将传感器分别向下和向左移动,直到仅2号测头有信号为止。根据传感器反馈的不同信号,利用上位机调用运动控制卡控制跟踪机构运动,即可完成挡风玻璃边缘轮廓的跟踪。
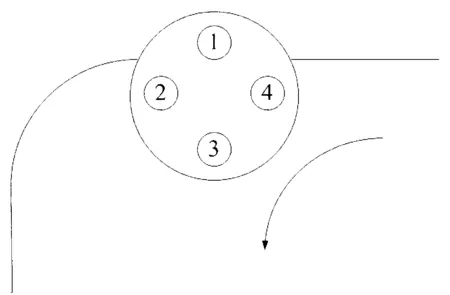
图6 电感测头工作原理
3 曲线拟合
轮廓曲线的拟合法主要有最小二乘法、NURBS拟合法以及RBF曲线拟合法等。最小二乘法易用数学方法表达,但精度较差;RBF法精度最高,但难以用数学方法表达;NURBS拟合法不但精度高,而且易于用数学法表达。根据挡风玻璃特殊的弧面形态,我们选用3次NURBS曲线拟合。NURBS分为两种方式:正算和反算。前者是根据控制点求曲面上的型值点,后者是根据曲面数据点反求控制点,在实际应用中,反算法应用比较多[2-3]。NURBS中统一了贝塞尔、有理贝塞尔、均匀B样条及非均匀B样条,其拟合流程为:(1)计算节点矢量;(2)计算样条基函数;(3)按矩阵表达式求控制点;(4)进行曲线拟合。根据实验探测到的汽车模型前挡风玻璃轮廓的数据,如表1所示,在Matlab中编程拟合出轮廓的轨迹,如图7所示。
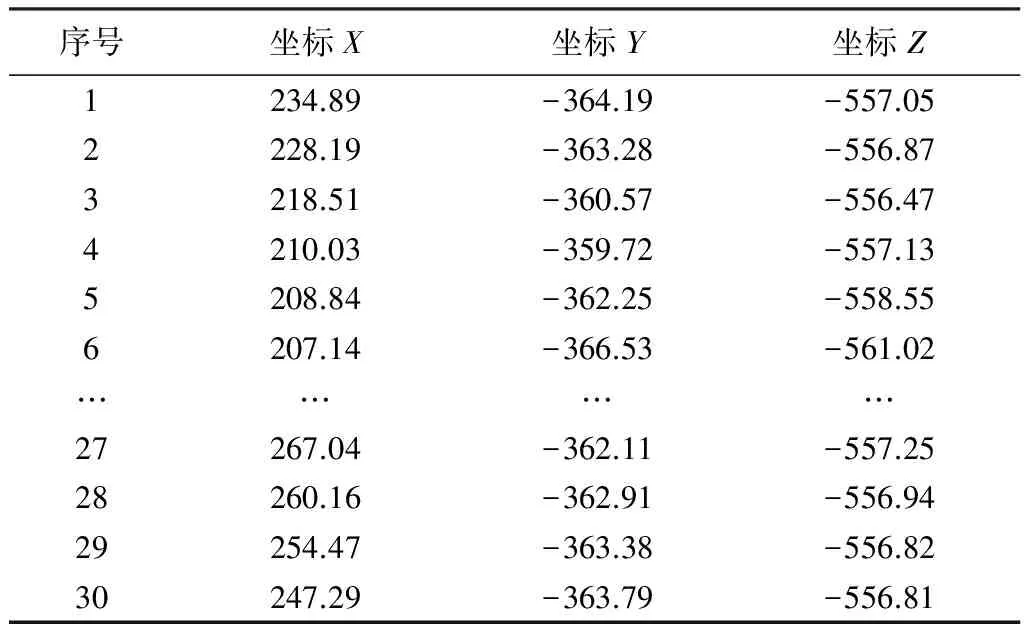
表1 前挡风玻璃轮廓数据点 mm

图7 前挡风玻璃轮廓图
4 拆解仿真
4.1建模与装配
根据设计出的跟踪机构,在SolidWorks 2012中对主要的零部件建立三维模型,对于主要的零部件,在MD3Dtools中选取标准件,如滚动轴承 61800-2RZ[GB-T 276-94]等。随后对其余非标准件按照从主到次的顺序建立模型,跟踪机构的主要零件包括滚珠丝杠、丝杠螺母、步进电机、电机轴、电机座、联轴器、导管、导轨、铝型材、端盖、橡胶垫、蹄脚、机架、挡块和工作台等。考虑到后续仿真的需要,对三维空间各个轴分别建立子装配图,最后建立的跟踪机构三维模型。装配完成后,对装配图分别进行静态和动态干涉检查,避免了设计缺陷。
4.2虚拟现实仿真
将SolidWorks建立的装配图文件另存为VRML可以识别的wrl格式,然后用文本编辑器VrmlPad进行编辑。由于SolidWorks默认单位为mm,需要改成VRML的默认单位m,在SolidWorks2012中依次选择“工具”、“选项”、“文档属性”、“单位”,最后选择“单位系统”中的“MKS”即可完成单位转换。因跟踪机构较为复杂,如果将其整体导出为wrl文件,会使SolidWorks转换困难,而且不利于VrmlPad编辑,此时将零件依次导出,其余零件全部隐藏[4-7]。利用VRML的内联节点Inline可从网络上的任意地方读取VRML文件,语法为:Inline{ exposedField MFString url“”},url的域值用于设定VRML的有效URL,其中包含一组节点,可以同时装载多个能找到的VRML文件[8-9]。导入VrmlPad后可以在资源栏下找到这些文件,运行后在Cortona中场景显示过小,此时可以将图像比例放大100倍显示。
为实现三轴联动,需要对导入后的各轴文件进行嵌套编程,建立Transform节点,每个节点分别对应一个实体模型。所有子模型都创建在Transform节点坐标系的原点处,这样通过该节点就可以将运动传递下去。然后添加运动关系,利用时间传感器Clock输出时间,用cycleInterval设定时间长度为20.0 s,朝向插补器Rotation将运动传递给位置插补器Path,最后用路由Route将节点连接起来。
4.3交互控制
利用VB设计出挡风玻璃轮廓拆解的仿真控制界面,如图8所示,然后在命令窗口编程分别实现了三轴的正、负方向移动、单轴自动运行、三轴联动控制。在4个不同时刻,截取跟踪机构的位姿,如图9所示。
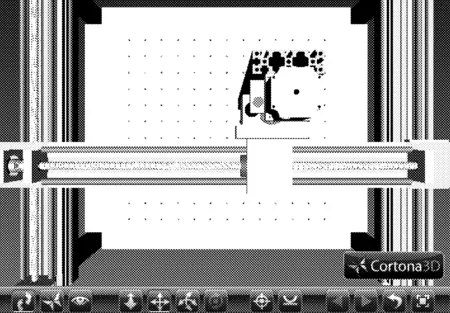
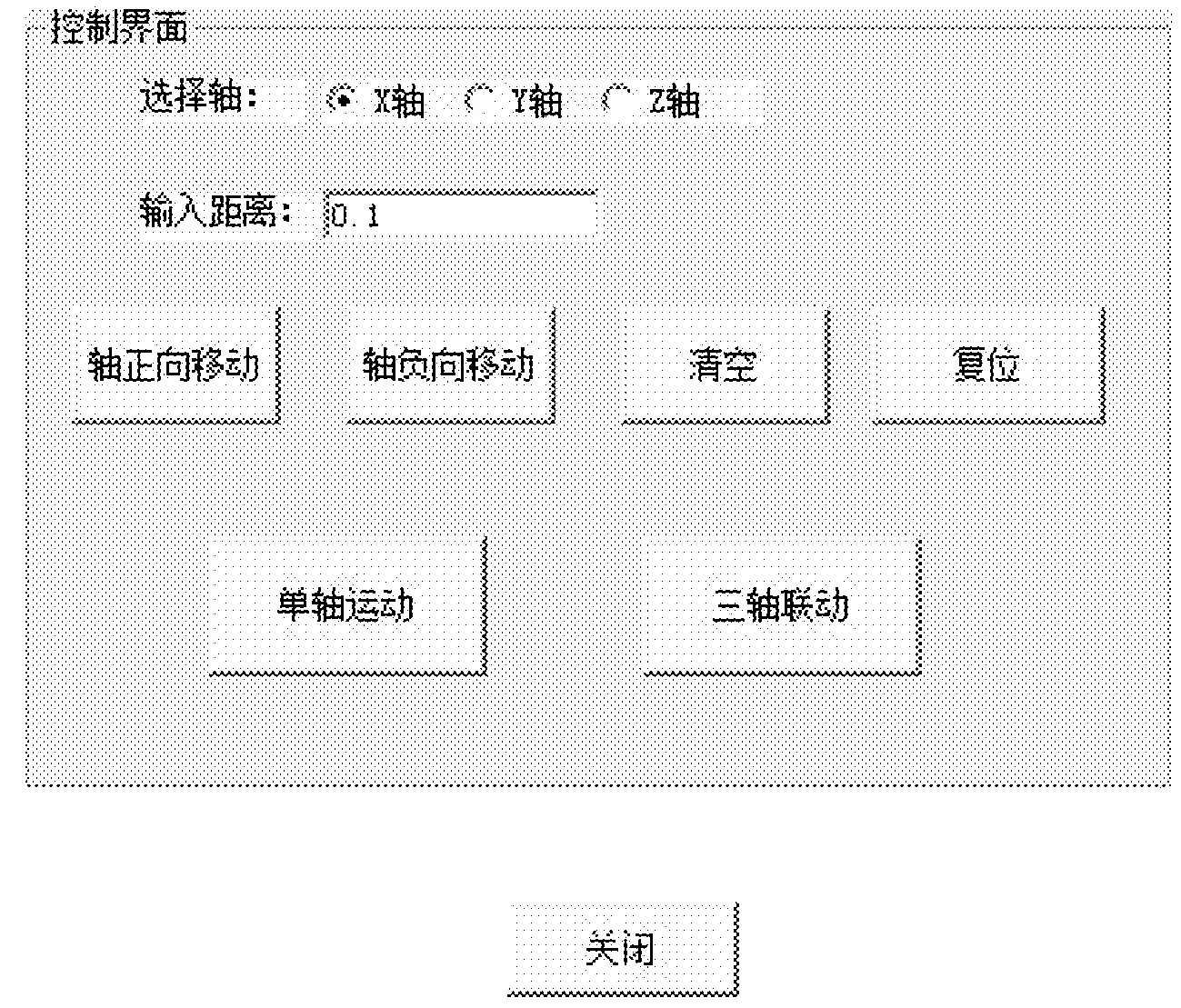
图8 仿真控制界面
5 结论
研究了报废汽车挡风玻璃拆解轮廓跟踪技术,设计出的挡风玻璃边缘检测传感器,信号采集良好,跟踪精度较高,拟合出的轮廓与实际轨迹接近,可作为实际的拆解轮廓。利用VrmlPad进行编程,方便对机构动作进行调整控制,VB控制界面有效地实现了人机交互,虚拟现实出的报废汽车挡风玻璃拆解轮廓的跟踪过程,画面逼真,动作流畅,仿真效果令人满意。
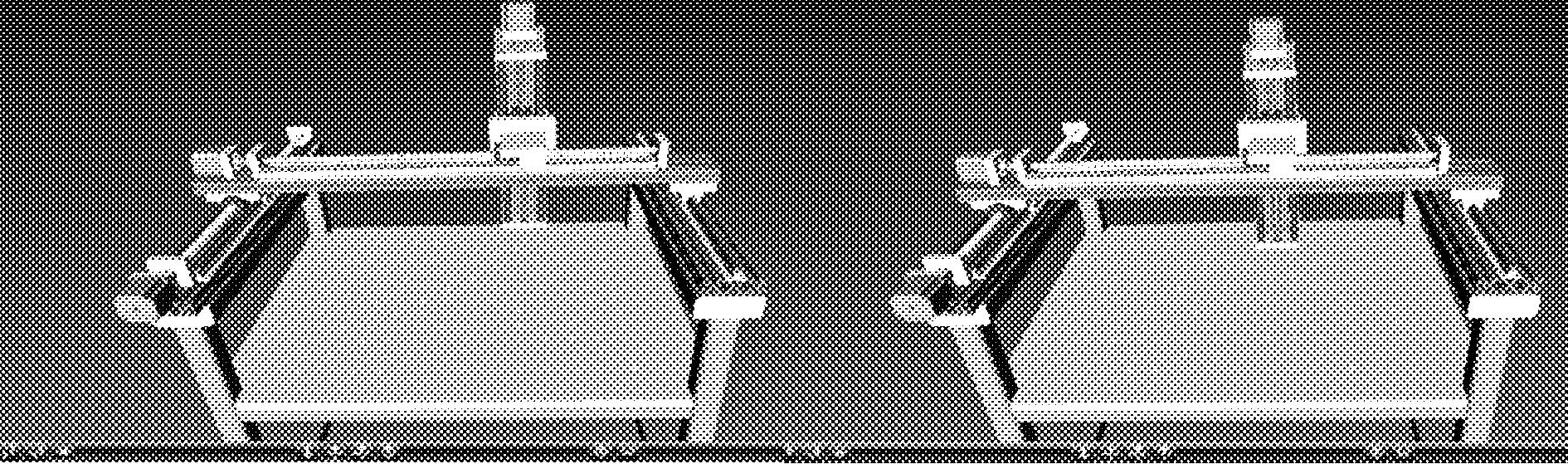
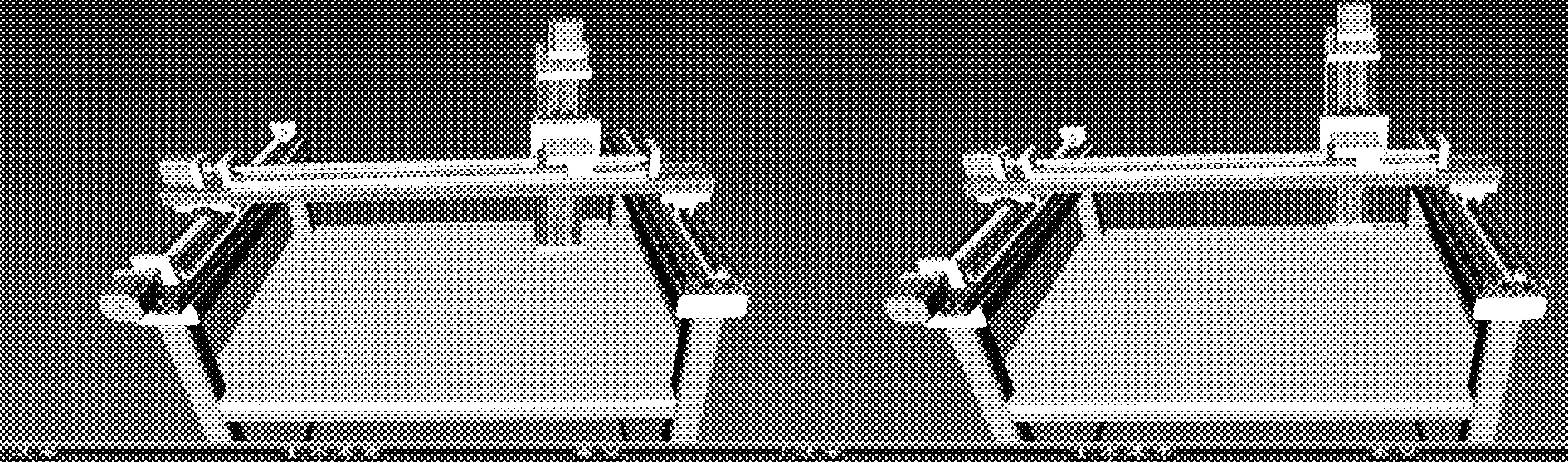
图9 仿真时截取的4个瞬时姿态
参考文献:
[1]ZHOU Z Q,DAI G H,TAN H M.Research of NURBS Based Approach for Fitting Contour of Windshield.Advanced Materials Research,2013,655-657;1246-1250.
[2]施法中.计算机辅助几何设计与非均匀有理B样条.北京:高等教育出版社,2001.
[3]秦开怀,关右江.圆弧曲线的三次NURBS表示.计算机学报,1995,18(1):146-152.
[4]汤嘉立,姚正军,黄斌,等.基于VB和VRML的虚拟仿真试验系统.计算机工程与设计,2006(6):2192-2195.
[5]DOLINSKY M,ANSTEY J,DAVE E,etal.Collaborative virtual environments art exhibition.Conference on Stereoscopic Displays and Virtual Reality SystemsXII,2005,1.
[6]Kay T L,KAJIYA J T.Ray Tracing Complex Scenes.New York,USA:ACM,1986,20(4):269-278.
[7]NEUGO EAUER ebauer R,WEIDLICH D,ZICKNER H,et al.Virtual Reality Aided Design of Parts and Assemblies.International Journal on Interactive Design and Manufacturing,2007,1(1):15-20.
[8]赵建军,莫毅华,朱林.基于VRML-OpenGL的虚拟场景构建与应用.机械设计与制造,2006(9):151-152.
[9]袁锋伟,李必文,何彬.基于solidworks-vrml实现虚拟现实的精确建模.机电工程,2007,24(10):357-359.
猜你喜欢
课堂内外·小学版(低年级)(2023年6期)2023-04-29 00:44:03
公民与法治(2022年10期)2022-10-12 07:46:14
制造技术与机床(2019年11期)2019-12-04 05:50:54
妇女(2019年5期)2019-07-02 07:58:08
作文·初中版(2017年10期)2017-10-25 10:09:40
通信产业报(2016年44期)2017-03-13 08:41:45
计算机工程(2015年4期)2015-07-05 08:27:39
时代英语·高三(2013年6期)2013-04-29 00:44:03
舒适广告(2008年9期)2008-09-22 10:02:48
雕塑(1999年2期)1999-06-28 05:01:42