旋转机械振动信号的Kalman滤波及故障诊断
2014-03-21 12:28:45赵锦剑杨光永周安然项敏敏
仪表技术与传感器 2014年5期
赵锦剑,杨光永,2,周安然,项敏敏
(1.云南民族大学电气信息工程学院,云南昆明 650504;2.华南理工大学机械工程学院,广东广州 510640)
0 引言
机械系统振动信号处理及故障诊断方法包括自适应滤波[1]、高阶谱分析[2]以及独立分量分析(ICA)[3]等。自适应滤波适用于较复杂的机械振动信号处理,它具有很强的自学习和自跟踪能力,能够通过系统辨识来对某一未知的动态系统进行逼近。高阶谱是分析非平稳信号和非高斯信号的有力工具,可以定量地描述信号中与故障密切联系的非线性相位耦合。Yang[4]等研究了利用双谱分析定量地描述信号中与机械故障密切联系的二次相位耦合的方法,进而对转子故障进行诊断。但常规的双谱分析只以单通道信息为研究对象,不能完全地反映旋转系统的非线性特征,从而影响了故障诊断的准确性。ICA是盲源信号分离方法之一,能够在无正交限制下抽取信号的统计独立分量,并且对微弱机械振动信号的特征提取有较好的效果。如文献[5]对齿轮箱的振动信号进行分离,使微弱故障信息明显增强。但ICA存在收敛速度较慢以及误差累积等不足。
旋转机械系统稳定运行过程产生的振动响应信号可以由AR模型来描述,常用的AR模型参数估计方法有最小均方(LMS)算法和递推最小二乘(RLS)算法。LMS算法的特点是运算简单,无需计算相关函数,但收敛速度较慢;RLS算法虽然具有较快的收敛速度,但其得到的数据自适应滤波器是对每一组输入数据而言的,未能体现信息的完整性[6]。文中提出了一种基于Kalman滤波原理的旋转机械振动信号处理方法,并将其应用于旋转机械系统故障诊断。
1 Kalman滤波原理
Kalman滤波器是一种高效率的递归滤波器,它能够从一系列的不完全及包含噪声的测量中,估计动态系统的状态。其算法简述如下[7]:
1.1状态方程和观测方程
状态方程:
X(n+1)=F(n+1,n)X(n)+W(n)
(1)
观测方程:
Y(n)=C(n)X(n)+V(n)
(2)
式中:X(n+1)为系统在离散时刻n+1的状态向量;Y(n)为时刻n的观测向量;矩阵F(n+1,n)和C(n)分别为状态转移矩阵和观测矩阵;向量W(n)和V(n)为互不相关的零均值高斯白噪声,它们的相关矩阵分别为Q1和Q2(n)。
1.2Kalman递推公式
根据Kalman滤波算法原理,其递推公式如下:
状态向量预报方程:
(3)
状态预报相关阵:
P(n+1,n)=F(n+1,n)P(n)FT(n+1,n)+Q1(n)
(4)
Kalman增益:
G(n)=P(n,n-1)CT(n)[C(n)P(n,n-1)CT(n)+Q2(n)]-1
(5)
新息过程:
(6)
一步预报:
(7)
状态滤波误差相关阵:
P(n)=P(n,n-1)-G(n)C(n)P(n,n-1)
(8)
Kalman滤波预估计就是用前面两个时间更新方程(式(3)~式(4))获得先验估计,然后通过后面4个状态更新方程(式(5)~式(8))对先验估计矫正获得最优估计。根据这6个递推公式,便可以连续地求出各个时刻的滤波值以及相应的估计误差。
2 旋转机械振动信号Kalman滤波模型的建立
Kalman滤波最初是为了解决工程控制问题而提出来的,但它的思想完全可用于对旋转机械振动信号进行滤波处理。文中根据旋转机械振动信号的特点,利用Kalman滤波算法对振动响应信号的AR模型参数进行估计,然后利用AR模型建立稳定机械系统振动响应信号对应的状态空间方程,并结合Kalman滤波递推方程组对旋转机械振动信号进行降噪滤波处理。
2.1旋转机械振动响应AR模型参数估计
通过数据采集系统得到的旋转机械系统振动信号数据属于时间序列数据,因此可以建立旋转机械系统振动响应信号的AR模型并进行状态预测。
如果把AR模型看成一步线性最小方差预报,已知的输入向量由x(n-1),x(n-2),…,x(n-p)构成,将这些输入向量和p个参数ak进行加权运算,便可求出下一步预测向量x(n)的估计,希望输出为x(n)。其方程式可以表示如下:
(9)


(10)
式中ε0(n)为期望输出x(n)的最优估计误差。
AR模型的阶数p一般事先是未知的,可以根据信息论准则和最终预测误差准则来确定。
利用自适应Kalman滤波算法对AR(p)参数进行在线估计时,考虑到最优参数是随时间变化的,因此把参数估计过程看作非平稳过程,引入过程噪声ε1(n),则有:
A(n)=A(n-1)+ε1(n)
(11)
根据Kalman滤波原理,由式(10)和式(11)可得Kalman滤波器的状态方程和观测方程:
状态方程:
A(n)=A(n-1)+w(n)
(12)
观测方程:
x(n)=X(n)A(n)+v(n)
(13)
式中w(n)和v(n)是相互独立的零均值平稳随机过程。


利用Kalman滤波算法获得旋转机械振动响应信号的p阶AR模型的参数a1,a2,…,ap和最优估计误差ε0(n),便可建立式(9)所示的AR模型。
2.2基于AR模型的状态空间方程的建立
设稳定旋转机械系统振动响应信号的时间序列数据为x(t),t=1,2,…,n,利用前面所述的Kalman算法获得稳定旋转机械系统振动响应信号的p阶AR模型的参数a1,a2,…,ap以及e(t),建立AR模型方程。则有:
(14)

式(14)可以改写为:

(15)
若取状态向量X(t)=[x(t),x(t-1),x(t-2),……,x(t-p+1)]T,则可得到如式(1)形式的状态方程:
X(t)=FX(t-1)+W(t)
(16)
若观测数据为y(t),则得到如式(2)的观测方程:
y(t)=CX(t)+v(t)
(17)
3 基于Kalman滤波算法的故障诊断原理

4 仿真实验
根据旋转机械振动特点,构造仿真信号:
x(t)=20[sin(100πt)+sin(180πt+π/6)]t
=[0,T]
(18)
y(t)=x(t)+n(t)
(19)
式中:x(t)为旋转机械系统稳定运行时的振动响应原始信号;y(t)为叠加了噪声的观测信号;n(t)为干扰噪声;T为原始信号的取样长度。
4.1利用Kalman算法对旋转机械振动信号进行滤波
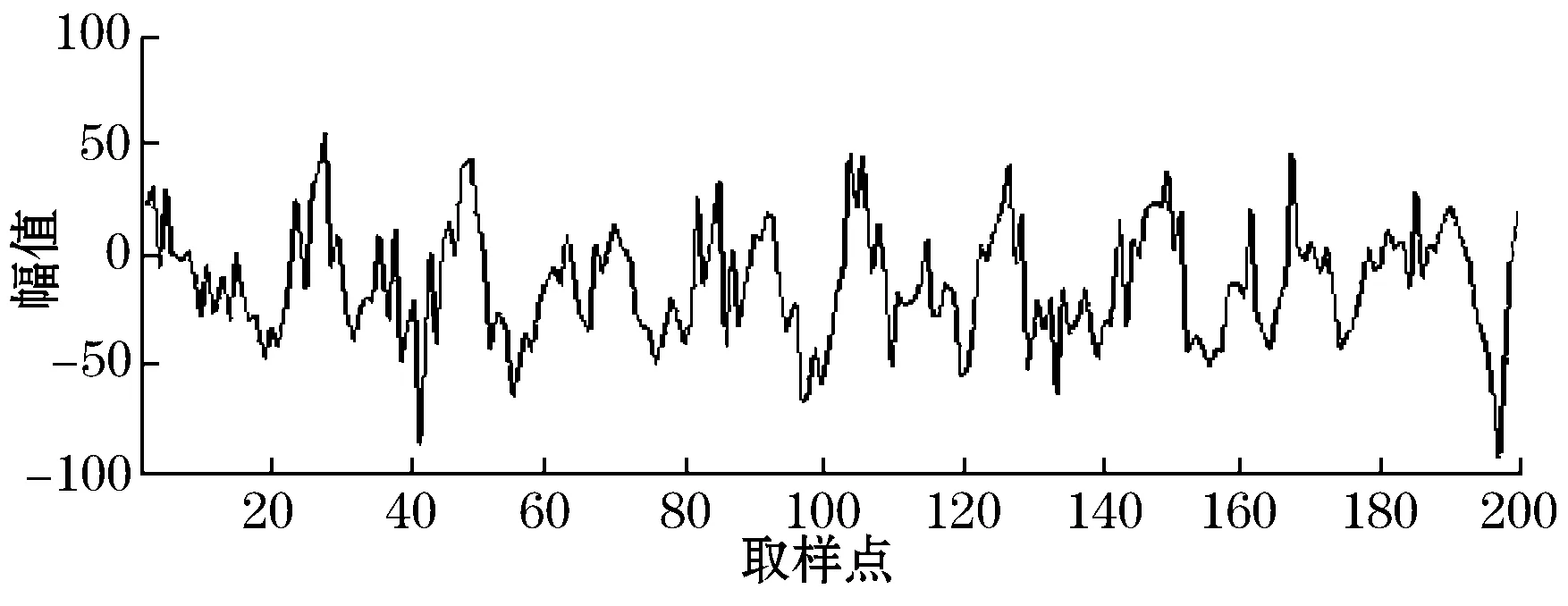
对x(t)进行仿真取样,采样频率为1 kHz,取样200个点,即T=0.2 s.当p=6时,AR(6)模型波形与原始波形x(t)可以达到很好的拟合度,如图1所示。此时AR(6)模型参数为:a1=-0.140 0,a2=-0.431 9,a3=1.629 4,a4=-0.786 6,a5=-1.986 9,a6=2.652 7。AR模型参数的收敛速度与RLS算法以及LMS算法的进行比较,结果如图2所示。可看出,AR参数具有很好的收敛速度且优于RLS算法和LMS算法。

图1 原始信号波形与AR(6)模型波形

图2 3种算法AR(6)模型参数的收敛速度
利用所求的AR(6)模型构建状态空间方程,结合Kalman滤波递推方程组对观测信号y(t)进行滤波。由于机械结构的复杂性,往往机械振动信号中叠加了多种类型的噪声,因此在文中给原始信号x(t)同时叠加均值为0、方差为15的高斯白噪声,λ=15的泊松噪声,以及σ=15的瑞利噪声进行滤波仿真实验,结果如图3所示。可看出Kalman滤波算法能够有效地滤除观测信号中的噪声,在刚开始时估计值与实际值相差较大,但随着Kalman迭代过程的进行,估计值与实际值将不断缩小,最终两者的差值将趋于系统状态噪声值。
(a)叠加3种噪声后波形
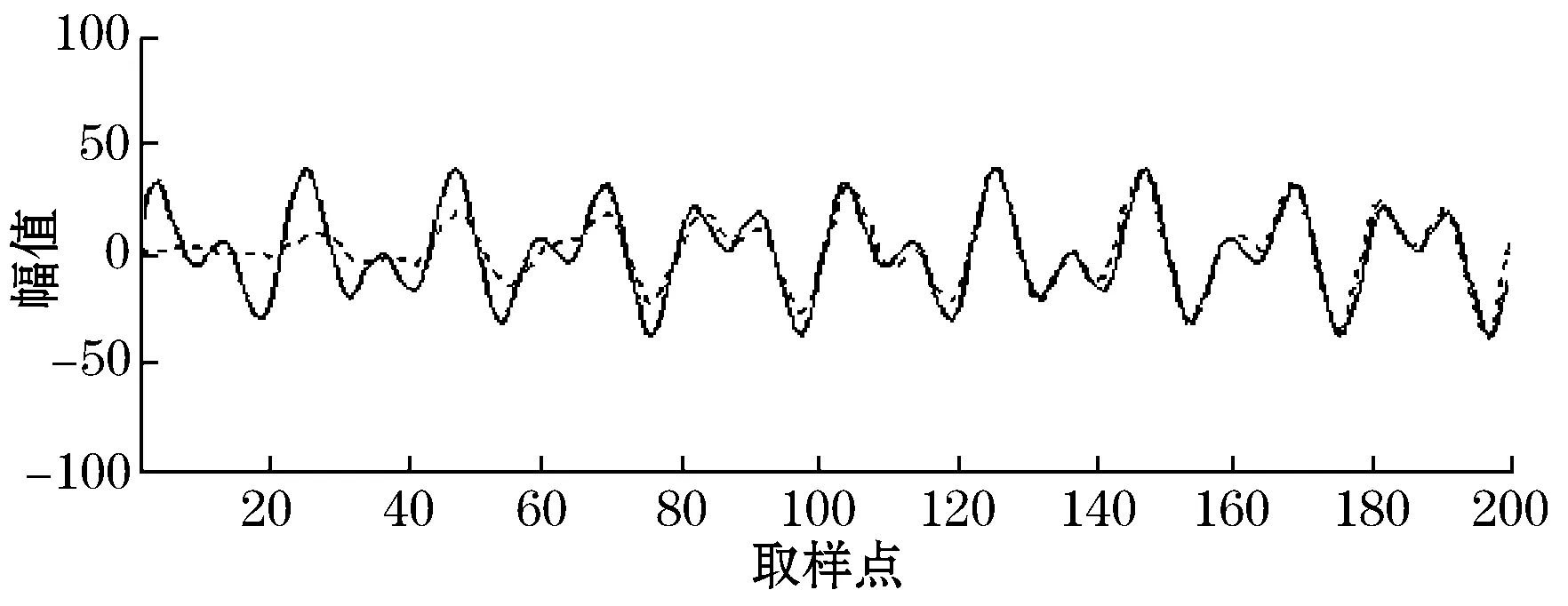
(b)原始波形和估计波形
4.2利用Kalman滤波算法对旋转机械系统进行故障诊断
对x(t)进行仿真取样,采样频率为1 kHz,取样1 000个点,即T=1 s;设高斯白噪声n(t)的均值为0、方差为5。在x(t)的1 000个取样点中包含微弱突变,图4为对应的Kalman滤波估计误差,可以明显的看到大约在第850个取样点处信号发生了突变。由此可判断在第850个取样点,设备运行异常。

图4 带突变点原始信号的Kalman滤波估计误差
5 结束语
文中为旋转机械系统振动信号的处理及故障诊断提供了一种有效可行的方法。该方法能够有效地滤除旋转机械振动信号中的噪声,为后续的机械振动响应信号的分析处理和运行状态的特征提取提供有效的数据保障,而且能够有效地检测出机械振动信号中的微弱突变信息,对机械故障进行诊断。同时,其收敛速度方面优于RLS算法和LMS算法。
参考文献:
[1]HAYKIN S.Adaptive filter theory.4th ed.Englewood cliffs:Prentice Hall,2002:436-498.
[2]NIKIAS C L,PETROPULU A P.Higher Order Spectral Analysis:A Nonlinear Signal Processing Framework.Englewood cliffs:Prentice Hall,1993.
[3]HYVARINEN A,KARHUNEN J,OJA E.Independent Component Analysis.New York:Wiley & Sons,2001.
[4]YANG J T,XU J W.Higher order spectral analysis in fault diagnosis of rotors.Chinese Journal of Mechanical Engineering,2001,14(1):40-44.
[5]黄晋英,毕世华,潘宏侠,等.独立分量分析在齿轮箱故障诊断中的应用.振动、测试与诊断,2008,28(2):126-130.
[6]VASEGHI S V.Advanced Digital Signal Processing and Noise Reduction.4th ed.Chichester:John Wiley&Sons Ltd,2008:191-224.
[7]EUBANK R L.A Kalman Filter Primer.Boca rat on:CRC Press,2006.
[8]李曼,司颉,张锋军.矿井主通风机在线监测与故障诊断系统.仪表技术与传感器,2013(1):62-64.
猜你喜欢
昆明医科大学学报(2022年3期)2022-04-19 14:00:38
高中数理化(2022年2期)2022-02-22 02:16:48
厦门理工学院学报(2016年1期)2016-12-01 04:50:50
浙江大学学报(工学版)(2016年2期)2016-06-05 09:20:51
现代工业经济和信息化(2016年5期)2016-05-17 05:35:56
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
国外科技新书评介(2015年3期)2015-05-28 10:38:04
水电站机电技术(2014年6期)2014-09-26 12:07:44
振动、测试与诊断(2014年5期)2014-03-01 01:14:21
机械与电子(2014年1期)2014-02-28 02:07:31