基于英飞凌XC2268N的整车控制系统CAN通信设计
2014-03-21 12:23黄娟娟夏超英柳同生
仪表技术与传感器 2014年5期
黄娟娟,夏超英,柳同生
(1.天津大学电气与自动化工程学院,天津 300072;2.天津市核奥达新技术开发有限公司,天津 300350)
0 引言
随着能源问题和环境问题的日益严重,电动汽车作为新能源汽车的代表,具有高效、节能、低噪声、零排放等优点,已成为了汽车产业的趋势[1]。电动汽车是由多个子系统构成的统一整体。随着整车安全性、稳定性、舒适性的提高,电动汽车上所需的控制部件越来越多,各子系统之间需要交换的信息也越来越多,整个控制系统也越来越复杂。
控制器局域网络(Controller Area Network)是在汽车领域应用最广泛的总线,它具有实时性强、可靠性高、通信速率快、结构简单、互操作性好、总线协议具有完善的错误处理机制、灵活性高和价格低廉等特点[2-3]。在汽车设计中,分布式CAN网络常被用于数据通信,可以减少车身线束,降低布线的复杂度,方便故障诊断,满足主要系统间大量数据信息实时交换的需要。整车控制系统CAN总线通信是纯电动汽车发展的关键技术之一,其性能是保证其可靠性和实时性的基础。
1 英飞凌XC2286N控制器特点
结合电动车整车控制器的功能需求以及车辆运行时的环境,纯电动汽车整车控制器主控芯片需要有高速处理性能、稳定性、硬件接口丰富、软件功能丰富、经济成本低等特点。
英飞凌XC2268N是一款高性能16位汽车级微控制器,集成了16位CPU,程序和数据存储器、中断控制器、外设控制处理器、一般定时器单元、看门狗定时器、MultiCAN模块和几个片上外设等,满足纯电动汽车控制的需要。该控制器具有功耗低、抗干扰能力强、高频噪音低等特性,特别适合整车控制应用。其片内带有集成MultiCAN模块,简化了传统单片机外接CAN控制器和CAN收发器的复杂外围电路。该模块具有的主要特性有:
(1)CAN 功能根据CAN V2.0 B active 技术规范确定(与ISO 11898标准兼容);
(2)多达6个独立的CAN节点,每个节点可单独设定数据传送速率,最高通信速率可达1 Mbit/s;
(3)64个报文对象可独立地分配给任意一个节点,并可独立配置为发送或者接收对象处理11位标识符的标准帧或29位标识符的扩展帧,且每个对象均具有验收滤波功能;
(4)先进的数据管理:报文对象可组织为双链列表;
(5)具有灵活、功能强大的报文传送控制和错误处理功能、先进的CAN总线位时序分析和由帧计数器实现波特率检测功能;
(6)多达16个独立的、可编程中断输出[4]。
2 纯电动汽车整车控制系统
2.1整车控制系统
纯电动汽车总成驱动系统主要由电机驱动系统、电池管理系统以及整车控制系统组成。其中整车控制系统相当于纯电动汽车的大脑,其性能直接决定了电动汽车的行驶性能和稳定性。整车控制系统一般由整车控制器、CAN总线通信系统、踏板以及车载显示系统组成。根据电动汽车的特点及纯电动汽车控制的需要,纯电动汽车整车控制系统需要具有车辆信息采集与系统信息显示、驾驶员驾驶意图信息采集、对车辆其他工作部件的管理、CAN网络通信、能量优化管理、故障诊断和处理等功能。
2.2CAN通信模块的结构及功能
CAN通信模块主要完成数据通信功能,实现整车控制器与电机驱动器、电池管理系统等其他独立控制模块之间的信息交换。整车控制系统CAN通信模块结构如图1所示[5],文中主要实现整车控制器与电机控制器、电池管理系统之间的通信,并预留了智能充电机、监控和诊断接口以及智能显示仪表3个节点,以供后期扩展。
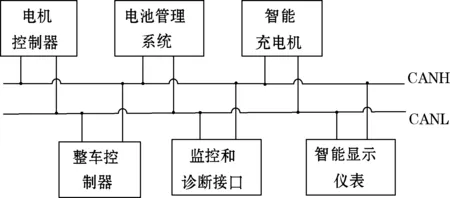
图1 整车控制系统CAN通信模块结构图
整车控制器通过传感器获取驾驶员的驾驶操作,解释驾驶员的驾驶需求,同时通过CAN总线获得电机和电池的状态信息,并根据车辆运行状态,进行力矩计算、能量管理、故障诊断与处理等,再通过CAN总线驱动继电器组中的相应继电器,向电机控制器发送力矩、转速等操作指令[6],驱动电机按驾驶员意图运转,同时也管理智能充电机、智能显示终端等其他控制模块的运行。
3 CAN通信模块硬件设计
根据控制器设计要求,系统采用两路CAN通信,分别对应XC2268N的CAN0和CAN1通道。CAN收发器采用TLE6251DS高速CAN总线收发器,该芯片可由整车控制器电源隔离侧+5V电压供电,具有很强的抗电磁干扰能力和高温保护功能。为了提高CAN通信抵抗电磁干扰的能力,在XC2268N和CAN收发器之间加入了光耦隔离电路[7]。隔离电路采用HCPL0611高速光耦,最高传输速度可达10 Mbit/s,非常适合整车控制器的技术要求和应用环境,光耦输入侧和隔离侧电压分别由整车控制器电源VCC和隔离的+5 V电源提供。同时在总线输出信号线CANH、CANL之间采用扼流线圈B82793-S0513,抑制共模干扰信号。CANH、CANL信号线对地之间采用双向稳压二极管,防止信号的尖峰电压干扰,保护总线网络。整车控制器的两路CAN通信模块电路原理相同,如图2所示。
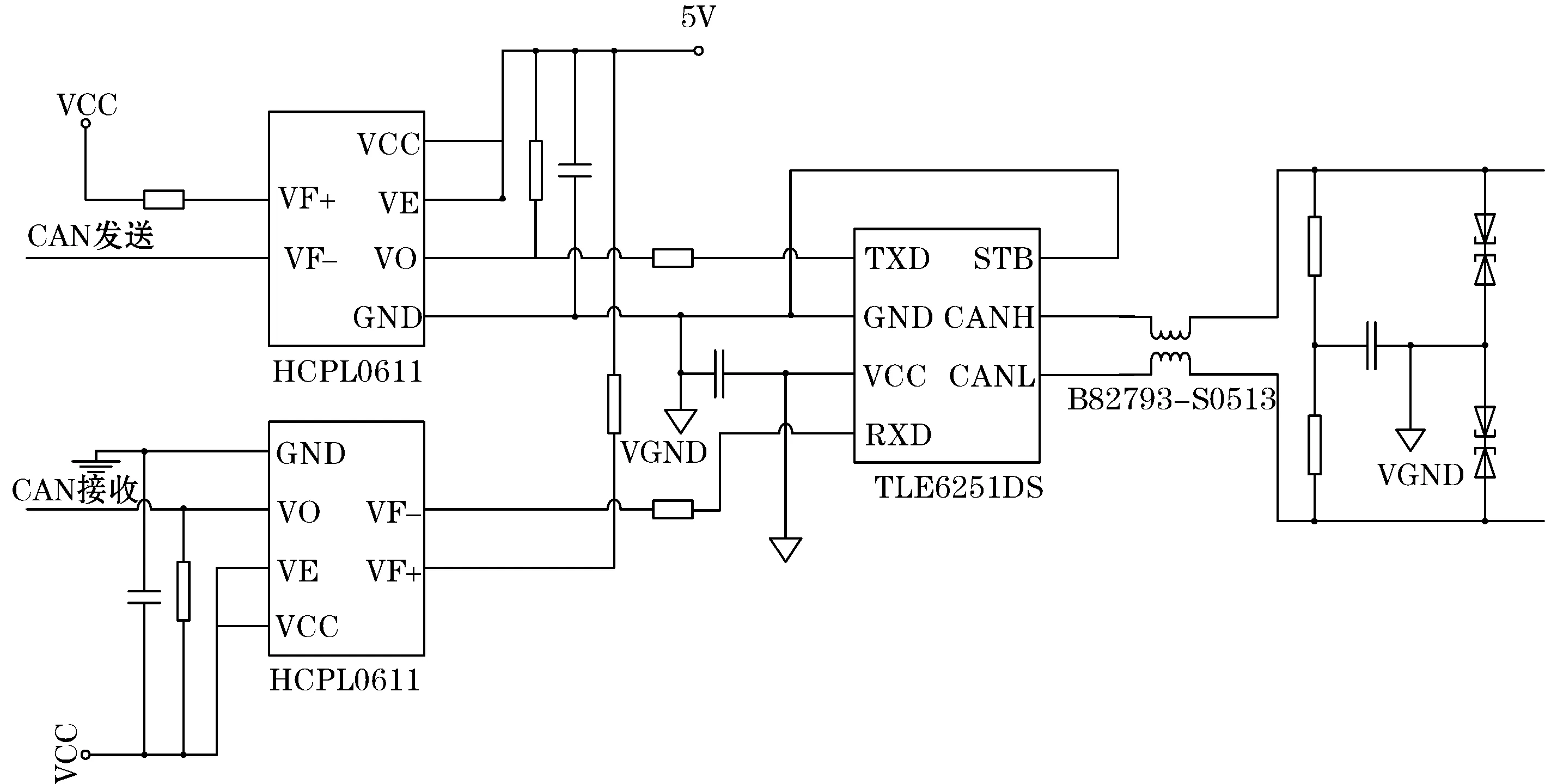
图2 CAN总线模块电路原理图
4 CAN总线应用层协议的制定
4.1CAN总线协议
CAN总线协议的制定一般包括物理层、数据链路层(包括逻辑链路控制子层(LLC)和媒体访问子层(MAC))和应用层三个方面。CAN物理层是实现ECU与总线相连的电路。目前CAN物理层设计已经比较完善。CAN协议数据链路层也已经在ISO11898-1中做了完整的定义,并且不可更改。因此该协议的制定主要是针对应用层进行设计。
4.2CAN总线应用层协议的制定
CAN总线应用层协议制定应使通信更加规范、稳定、及时,能最大限度的发挥CAN总线的优异性能,降低总线负载率[8-9]。
该系统协议满足SAE J1939以及CAN 2.0B标准,采用29位识别码扩展信息帧格式,通信波特率为250 kb/s.29位标识符分配表如表1所示。

表1 29位标识符分配表
表中各部分意义如下:
(1)P:优先级,由3位组成,分8级,0为最高级,7为最低级;
(2)R:保留位,由1位组成,现固定为0;
(3)DP:数据页,由1位组成,现固定为0;
(4)PDU格式(PF):PDU代表协议数据单元,分为PDU1和PDU2两种。PDU1用于点对点发送,PDU2用于全局广播;
(5)特定PDU域(PS):当PF<240时,PS定义为目标地址;PS在240到255之间,则定义为扩展组;
(6)源地址(SA):在网络中的每一个装置都仅有一个唯一的8位源地址。
在分配节点地址时,要考虑各个节点的重要性,重要性越强的节点地址越小。该协议是参考SAE J1939 Issued APR2000推荐的地址对整车控制器、电机控制器以及电池管理系统等进行分配的。整车控制器地址为39(27H)、电机控制器地址为239(EFH)、电池管理系统地址为243(F3H)。
系统中,总共设计7个报文,每个报文有8个字节的信息。其中,整车控制器发送给电机控制器1个报文,该报文包括电机工作模式、电机目标转速、目标转矩等,报文优先级设为3,通信周期设为10 ms.同时,整车控制器也接收电机控制器的4个报文和电池管理系统的1个报文,此5个报文优先级也为3。电机控制器发送的报文信息包括电机控制器工作状态、电机当前转速和转矩、累计里程数、电机故障状态等,报文通信周期设为50 ms.电池管理系统发送的报文信息包括电池总电压、电池母线电流、电池SOC等,由于电池内部传感器信息更新较慢,所以通信周期设为500 ms.为了方便数据记录,整车控制器还发给上位机1个报文,报文内容包括电机转速、踏板开度、电机转矩、电池电流等需要显示的量。
5 CAN通信模块软件设计
设计是基于英飞凌XC2268N单片机,在Tasking编译环境下,采用C语言进行程序设计。整车控制器CAN通信模块的软件设计主要包括CAN模块的初始化、报文发送、报文接收3个部分。考虑到电机的干扰和CAN总线的高速性,不用中断模式即可满足要求,所以在消息发送和读取均采用定时调度的方式。由于CAN通信的可靠性很强,所以在程序中没有专门对数据进行错误处理。
5.1CAN通信的初始化
要使用MultiCAN模块,必须对CAN模块进行初始化,配置相关寄存器。CAN模块初始化包括CAN模块的使能、波特率设置、验收滤波器设置、报文对象设置、CAN工作模式设定等[10]。CAN总线初始化程序流程图如图3所示。

图3 CAN初始化程序流程图
5.2报文的发送
报文发送请求是通过在报文所属的报文对象中设置发送请求实现的,且一个CAN节点同时仅可以发送一个报文对象以避免总线冲突。程序以62.5μs的定时器中断为时基,在中断服务程序入口处设置计数器,每当定时器中断中计数器计到160时,即10ms时,置CAN总线发送标志位,调用CAN发送程序,电机发送第一个报文,计数器清零;每当给电机发送20次后,置上位机显示标志位,整车控制器给上位机发送第二个报文。报文发送流程图如图4(a)所示。
5.3报文的接收
整车控制器一共需要接收5个报文对象。英飞凌XC2268N带有自动滤波功能,当CAN总线发来一个报文,根据CAN总线应用层协议规定好的ID含义,就可将需要的数据保存到消息缓冲区,将不需要的过滤掉。接收到的报文被组织为双链表,报文的优先级排序是由ID标识中优先级符决定,当优先级一样时,按接收列表顺序决定。报文接收程序流程图如图4(b)所示。

(a)发送程序(b)接收程序
6 实验结果
为了验证设计的可行性,使用了Vector CANcardXL 进行试验,CANalyzer网络分析工具进行数据采集和上位机显示。CANalyzer具有良好的性能和编程功能,可以很方便的记录、观察、分析CAN通信结果。
台架试验装置主要有整车控制器、电机、电机控制器、测功机、电池、电池管理系统等。测功机与电机相连充当负载和倒拖电机以实现回馈制动。图5为测功机在20 N·m的情况下,电机转速、踏板信号、电机转矩和电池电流的关系。考虑到安全性,该次实验把电机转速限定为2 000转。
从图中可以看出在0~63 s,电机处于加速状态,当踏板开度超过踏板死区0.025时,电机转矩跟随整车控制器给定转矩,超过了20N·m,电机开始加速;踏板开度越

图5 台架试验结果
大,电机转矩越大,加速越快,电池放电电流也会增大。在63~96 s,电机处于稳速阶段,随后整车控制器读取到刹车信号,电机转矩降低,转速降低,电池回收能量。图中虚线选出两个关键点,可见当踏板开度减小和增大时,电机转矩能够迅速响应,使电机速度随之变化,同时电池放电电流也紧随电机转矩变化而变化。在整个过程中,整车控制器、电机控制器以及电池管理系统之间的通信非常及时、稳定、可靠。
图6为CAN总线负载率和吞吐量,从图中可以看出,总线负载率在10%左右,峰值仅为10.76%,与以往相比,有了明显的降低,提高了CAN通信的可靠性,并为后期拓展留出余量;总线每秒总吞吐量为187。

图6 CAN总线负载率和吞吐量
图7为各ID每s吞吐量,图中可以看出,整车控制器的2个ID每s分别发送100帧和5帧,电机控制器的4个ID每s发送20帧,电池管理系统每s发送2帧,可以验证各个节点通信的正确性。
7 结束语
整车控制系统作为纯电动汽车的核心部件,需要实现整车控制器与其他模块的信息传递,保证纯电动汽车中其他独立控制子系统的可靠运行。系统硬件电路设计简单、软件设计复杂化低、并具有良好的拓展性。

图7 各ID每秒吞吐量
由试验结果可以看出,网络中各个节点可以实现可靠、及时的数据通信。整车控制器可以控制电动汽车加减速、匀速运行以及制动能量回馈。CAN通信模块体积小、功耗低、抗干扰性好、处理能力强,可在汽车这种电磁干扰强的复杂环境中稳定、可靠地工作;整个通信过程稳定、可靠、高效,使汽车能够及时响应驾驶员驾驶信息安全稳定的运行,达到了预期的效果。
参考文献:
[1]姜海滨.纯电动汽车整车控制策略及控制器的研究:[学位论文].上海:上海交通大学,2010.
[2]沈瑶,李小清,周云飞.基于CAN总线的电动车控制系统设计.电子设计工程,2010,18(11):143-145.
[3]李伟.面向故障检测的CAN总线通信研究.仪表技术与传感器,2010(3):50-53.
[4]Infineon Technology,High speed CAN Transceivers Application Note V1.0,2006.1
[5]钱多年.带增程器的纯电动汽车整车控制器设计.佳木斯大学学报(自然科学版),2012,30 (1):69-72.
[6]徐国凯,赵秀春,苏航.电动汽车的驱动与控制.北京:电子工业出版社,2010.
[7]林程.纯电动及混合动力汽车设计基础.2版.北京:机械工业出版社,2012.
[8]谢辉,周能辉,肖斌,等.XL纯电动轿车CAN总线系统及应用层协议的开发.汽车工程,2005,27(6):660-664.
[9]刘宇,张义民,曹万科,等.车身CAN总线网络数据传输效率优化算法的研究.汽车工程,2009,31(7):620-623.
[10]史久根,张培仁.CAN现场总线系统设计技术.北京:国防工业出版社,2004.
猜你喜欢
汽车电器(2022年9期)2022-11-07
汽车实用技术(2022年15期)2022-08-19
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
铁道通信信号(2020年4期)2020-09-21
中国外汇(2019年11期)2019-08-27
铁道通信信号(2016年8期)2016-06-01
通信电源技术(2016年1期)2016-04-16
噪声与振动控制(2015年4期)2015-01-01
中国塑料(2014年12期)2014-10-17