机动定位平台间时间同步系统的误差分析与控制*
2014-03-18 05:50刘晓健李名祺
电讯技术 2014年12期
刘晓健,李名祺
(上海无线电设备研究所,上海200090)
1 引 言
基于机动平台的时差定位系统是近年来在宇航测控领域中一个受到重视的研究课题[1-2],它可以飞机或卫星编队实现对目标的精确定位和跟踪,定位的精度很大程度上取决于站间时间同步系统的同步精度,例如,10 ns的时间误差就会产生约3 m的定位误差。
通过外部频率源进行时间同步是当今应用最广泛的技术手段。通过卫星导航系统,如GPS 和“北斗”进行时间同步,因为受到大气电离层散射等因素的干扰,其高精度只是统计意义上的,实际很难超过20 ns,且野值较多[3-5]。转发式卫星授时方式的精度稍高,然而也只能达到十几纳秒的水平[6]。其他外部授时方式,如长波、短波、低频时码,授时精度约0.1 μs~0.1 s[7],远低于定位精度的要求。
通过自组织的授时网络进行时间同步是获得更高精度的有效途径。由于测量站点间的距离通常较近,空间传输造成的误差远小于卫星系统,可以达到优于1 ns的时间同步精度。为了实现这个目标,在设计和实现过程中以下几项技术得到了综合运用:一是双向时间同步技术,它在双向钟差测量过程中消除了信道中的公共误差[8-9];二是非等量采样技术,伪码跟踪环路采用该技术后,可以通过较低的采样率得到优于码片宽度百分之一的时间分辨率[10-13];三是主站持续广播伪码序列,使得接收站能够始终跟踪主站的时钟频率,提高计时精度并降低环路的震荡;四是优化电路设计,降低板噪。
理想条件下,以上几项措施可以在系统层面将时间同步误差降低到1 ns左右。但实际情况中,站点之间存在诸如相对运动、频率源差异、环路抖动等不利影响,如果对这些综合作用的因素不加应对,时间同步的误差很容易退化到10 ns量级。此外,用户出于使用需求,常常要求时间同步模块以远高于1 Hz的频率输出校时脉冲,这样会大大压缩每次获取站间时差的处理时间,如果授时机制设计不当,无法在短时间完成,或者时统精度难以满足要求。针对上述问题,本文首先对误差的来源和影响进行分析,接着对于其中引起误差的主要因素给出了具体的控制措施,并对这些措施的效果进行了估计。
2 双向时间同步原理
双向时间同步是采用往返计时消息同步方式来实现,其基本原理如图1所示。假设从站相对主站的钟差为ε,且上下行传输时延相同。从站在1 时刻向主站发送询问消息,经过传输时延tp后在时刻2 到达主站;在时刻3(与0 时刻的时间差为固定值td),主站将测得的询问包的本地到达时刻TI通过应答包向从站发送,经过传输时延tp后,在时刻4到达从站;从站测量应答包在本地的到达时刻TR。由于tp=TI-ε=TR+ε-td,可以得出

从站根据上式可计算出相对主站的钟差ε,并调整本地的计时时钟,以实现精同步。由式(1)可见,ε 的精度取决于对TI和TR的准确测量。本系统通过测量伪码相位的方法实现该目的。

图1 往返计时消息同步方式原理示意图Fig.1 The schematic diagram of two-way timing scheme
3 误差来源
钟差ε 的误差主要来自TI和TR的测量误差以及上下行传输时延的不对称两方面。
3.1 TI 和TR 的测量误差
3.1.1 主从站的时钟偏差
伪码相位的精确测量是高精度授时的基础,在从站清零时刻、询问包到达时刻和应答包到达时刻处,都会通过伪码相位测出精确的到达时刻,主站向从站一直发送伪码序列,由于主从站的时间偏差会导致主从站产生的伪码周期发生变化,从而导致计时误差。
主站从站参考频率都为100 MHz,现假设主站真实频率为f0,从站真实频率为f0+Δf,伪码速率均为10.23 MHz,伪码跟踪环频率控制字更新时间为一个伪码周期。伪码数控振荡器(NCO)的频率控制字为46 b,从站以恢复出来的主站伪码为计时基准。
主从站初始伪码频率控制字

主站产生的伪码频率为
从站的初始伪码频率为

由于主从站间的频差导致的在一个伪码周期内的误差为

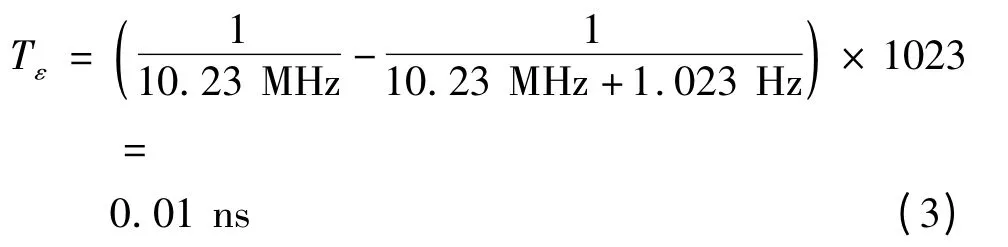
假设主站频率为100 MHz,主从站间的频差为10 Hz,由于时钟不一致在一个伪码周期内引入的测量误差为0.01 ns。在从站清零时刻,TI和TR处测量伪码相位时都会引入此误差,则引入的最大误差为0.03 ns。
3.1.2 多普勒效应
由于多普勒效应会导致伪码周期的变化,它们同样导致在1、2、3 点处的测量误差,效果等同于主从站间的频率偏差导致的误差。本系统要求的最大相对速度为30 m/s,由此伪码产生的多普勒频移为

由于相对运动导致的伪码多普勒频移很小,一个伪码周期时间范围内的时间测量误差为
3.1.3 伪码环路跟踪误差
(1)采样率对精度的影响
伪码跟踪环是实现伪码相位精确测量的主要工具,而影响其相位分辨率的关键因素之一是采样速率。Quirk 等[10]人于2002年指出,当采样速率与码片速率接近互质时,可以通过很低的采样率实现码片宽度1%的相位分辨率,这种技术被称为非等量采样技术(None Commensurate Sampling,NCS)。仿真和试验证明,对于10.23 MHz 的码片速率,100 MHz的采样速率可以让伪码跟踪环路获得0.07 ns以上的时间测量精度。
(2)码跟踪环热噪声误差
在工程实际中,延迟锁定环不可避免地受到噪声的干扰。噪声的来源主要有两类,一类是随输入信号一同进入环路的输入噪声和谐波干扰,另一类为跟踪环内部器件产生的白噪声。噪声和干扰的作用势必会降低跟踪环路的性能,使环路的输出相位产生抖动。下面在忽略码环白噪声的情况下,仅考虑输入高斯白噪声的影响。噪声是环路在跟踪过程达到稳态后,本地伪码对接收伪码存在相位误差。
设输入噪声是带限零均值高斯白噪声,其双边功率谱密度是N0/2。当无数据调制时,噪声对回路的影响最严重。此时,噪声在环路中引入的均方根跟踪抖动为[15]

式中,ρL为回路带宽内的信噪比,ρIF为中频带宽内的信噪比。

其中,Bn为中频滤波器的单边等效噪声带宽,本地取为10 kHz。当环路带宽为5 Hz、载噪比C/N0=37 dB-Hz、伪码速率为10.23 Mchip/s时,热噪声误差为Tdσε=0.49 ns,其中Td为超前伪码和标准伪码的间隔,本系统取1/10 码片。
3.2 上下行传输时延的不对称
在双向同步的原理介绍中,上下行传输试验被假设为相等。实际情况中,由于发射、接收设备电路的不一致性,和站间相对运动的存在,上下行传输时延会存在较为明显的差别,通常范围在几十到上百微秒左右。发射接收设备的不一致造成的时延误差近似为恒定值,可以通过多次测量求得后予以消除。而站间相对运动造成的传输时延不对称则是一个动态的量值,假设上下行链路的时延差为tε,则ε =的大小决定于相对运动的速度以及询问和应答消息的发送时间间隔。
根据装载平台的不同,相对运动速度为3~30 m/s;询问和应答消息的发送时间间隔的下限为询问消息的持续时间(本系统为16 ms左右),实际情况中还要考虑在两种消息之间加入保护间隔和应答消息报头的持续时间。保护间隔的取值要考虑站间距离,在站间相隔100 km的情况下,2 ms的保护间隔通常就已足够。报头的长度与波形设计有很大关系,如果发射波形能够让接收机的伪码跟踪环持续并保持稳定,则报头的长度只需要几十比特,否则其持续时间需要数百毫秒锁定以保证伪码跟踪环的锁定。
在本系统中,询问和应答消息的发送时间间隔定为18 ms,则相对运动在上下链路中引入的不对称误差为
综上所述,各种因素造成误差总量约为1.4 ns。
4 误差控制方法
根据前文的分析,各种因素对精度影响的程度从大到小依次为上下行传输时延的不对称、伪码环路跟踪误差和主从站的时钟偏差,其中,前两者是最主要的误差来源。下面重点讨论如何对这两个因素导致的误差进行控制,对其余的误差控制也将简要说明。
4.1 补偿上下行链路的不对称
补偿上下行链路不对称的一种方法是通过测量信号的多普勒频偏,从而估计出相对运动速度,进而计算出上下行链路传输时延的补偿量。具体做法是通过频率跟踪环路获取多普勒频偏,估计出当前的相对运动速度,进而估算出询问和应答消息的发送时间间隔内主从站之间的距离变化量,从而对上下行时延的不对称进行补偿。由于询问和应答消息的发送时间间隔仅为18 ms,可以近似认为在这段时间内主从站之间是相对匀速直线运动。采用这一方法的一个重要前提是,主从站的频率源必须具有很高的频率准确度与频率稳定度。在目前国内的技术条件下,可以采用经过减振设计[14]的恒温晶振。
频率估计是通过载波频率捕获和跟踪完成的,其过程分为载波频率粗捕获和精跟踪两部分。载波频率的粗捕获可以由并行频率捕获完成或锁频环完成[16],有效频率捕获范围在Ku 频段可达到±100 kHz左右,但是这种方法精度有限,在±1 kHz左右。更高的测量精度需要通过二阶锁相环路获得,根据实测,其跟踪精度可以达到±100 Hz左右,在13 GHz的载频上相当于2.3 m/s的相对运动速度。因此,可以将上下行链路不对称的误差减少到
另一种解决方法是双程双向测量体制,即按照图1进行完一次双向时间同步以后,将主站和从站的角色互换,重新执行一次双向时间同步。如果以上两次时间同步的间隔很短,可以近似认为主从站之间为匀速直线运动,这样两次求得的钟差分别为将两者相加除以2 即可消除上下行链路的时延差tε。但是这种方法会增加时统网络时序设计的复杂度,在站点数较多的情况下,效率较低,因此本文采用时频偏估计的方法。
4.2 改善伪码环路的跟踪误差
由式(1)~(2)可见,对伪码环路跟踪误差影响最大的两个因素分别是载噪比和环路带宽。但是减少环路带宽会影响环路的相应速度,严重时会导致发散,因而减少跟踪误差主要考虑如何增加载噪比。其手段主要是提高链路增益,在载波频率确定的前提下,可以通过提高发射功率、增加天线增益和定时同步算法来实现。实际工作中,如能保证载噪比大于45 dB-Hz,就可以使得该项误差保持在0.1 ns左右。
此外,伪码通道如果加载数据,相邻比特的极性翻转会导致环路的振荡加剧,使得误差明显超出理论的估计值。解决的方法是在将伪随机码和询问/应答消息调制到同一个频点上正交的两路载波(及相差90°的两路正弦波)并行发送。这样接收端的伪码跟踪环路一旦锁定以后,不会受到消息通道的干扰而出现抖动,同时消息通道的载波因为与伪码通道的载波具备严格的相位差,所以消息的到达时刻可以由伪码跟踪环路正确测得。
4.3 频率源校正
本系统选择的频率源为输出100 MHz的恒温晶振,其频率准确度和频率稳定度分别为10-8和10-10/s 量级。理论上两站的频率源误差在几赫之间,实际情况中交付的晶体常常由于电老化不充分,在使用过程中会出现频率漂移,其范围可以达到10 Hz量级。工作温度的不同也会导致晶体是谐振频率出现偏差,其值通常在几百皮秒以内。
解决方法之一是为频率源配置压控电位计,当发现主从站的时钟出现频率偏差时,可以在线通过程序调整频率源的频率,精度可以达到1 Hz以内。根据式(2)计算,可以将由频率源导致的误差降低一个量级。
综上所述,通过综合应用以上几项措施,可以将期望误差降低到0.2 ns左右的水平。
5 仿真与实验
本系统的码片速率为10.23 MHz,采用QPSK 调制,滚降系数设为0.5,信号3 dB带宽约为15 MHz,接收机采样率为100 MHz。参考文献[8]和[12]的设置,信道条件选择AWGN 信道,载噪比设为55 dB-Hz,这种情况比较接近编队飞行的站点间的信道环境。采用超前滞后结构的2 阶伪码跟踪环,码环带宽选择5 Hz,载波环带宽选择18 Hz,得到仿真结果如图2所示。

图2 伪码相位跟踪精度仿真结果Fig.2 Simulation result of pseudo code phase-tracking accuracy
从仿真结果可以看出,当码环锁定的时候,因为噪声的存在,本地伪码相位调整量在一个固定值附近波动,在5 s的仿真时间内,从1 000点后开始统计(去掉了前面捕获到锁定的过渡阶段调整量),伪码相位跟踪精度可达0.2 ns左右。
内场测试中采用信道模拟器来模拟节点之间的相对运动产生的载波多普勒频偏,载波频率为2.5 GHz,I 路为伪码,Q 路为消息,发射功率为2 W,主站和各个从站的信号通过射频线缆接入信道模拟器,而不采用天线辐射的方法,信道的等效衰减在标定线缆衰减的基础上,通过可调衰减器加以模拟。
时间同步精度的测量通过高速示波器观察主站和两个从站输出的秒脉冲之间的时间差来测量,高速示波器的通道误差约为0.1 ns。通过对测量结果进行统计处理,可以得到误差的统计结果。
图3显示了内场的测试系统组成。
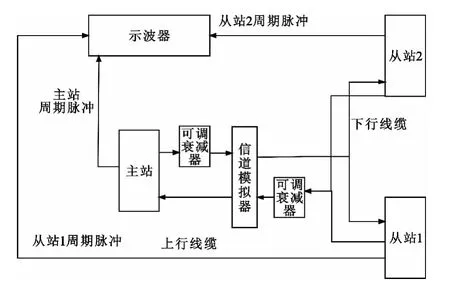
图3 测试系统组成框图Fig.3 The block diagram of testing system
测试时分别模拟了3 km和6 km距离的情况,相对运动速度为30 m/s。对于每个从站点,读取100组其与主站点的秒脉冲误差,然后利用公式计算其时间同步误差,其中Δti表示从站与主站的秒脉冲误差,N 表示测试的次数(100 次以上)。最终的测试结果如表1所示。

表1 测试结果Table 1 Test result
由表1可见,本系统的时间同步精度达到了0.2 ns的时间同步精度,可以满足编队移动分布式定位系统对于时间同步的技术要求。
6 结 论
在机动平台之间通过伪码相位测量完成高精度时间同步,是一项应用广泛的技术。本文结合工程研制经验,分别从频率源偏差、多普勒效应、环路抖动和上下行链路不对称方面分析了误差的来源,并量化了误差的估计。在此基础上,通过综合利用多种方法,可以有效地在站间机动条件下取得较为理想的时间同步精度。相比经典的双程双向测量体制,本方案在多个站点组网的条件下具备反应速度快、实现复杂度低的优点。在今后的研究中,如果考虑结合载波相位测量技术,预计可以取得更高量级的时间同步精度。
[1] 胡来招.无源定位[M].北京:国防工业出版社,2004.HU Lai- zhao. Passive Locating[M]. Beijing:National Defense Industry Press,2007.(in Chinese)
[2] 王旭.TDMA 系统目标多站定位理论与算法研究[D].成都:电子科技大学,2011.WANG Xu. Research on Muti- target Locating Theories and Algorithms of TDMA System[D].Chengdu:University of Electronic Science and Technology of China,2011.(in Chinese)
[3] 王惠南.GPS 导航原理与应用[M].北京:科学出版社,2003.WANG Hui-nan.Principles and Applications of GPS Navigation[M].Beijing:Science Press,2003.(in Chinese)
[4] 陈仕进.时间同步方法研究[J]. 测控技术,2005(4):51-53.CHEN Shi-jin.Research on Time synchronization methods[J].Measurement and Control Technology,2005(4):51-53.(in Chinese)
[5] 张国琴,吴玉. 基于GPS 校准晶振的高精度时钟的设计[J].仪表技术,2010(4):23-27.ZHANG Guo- qin,WU Yu. Design of High Precision Clock Based on the GPS Disciplined Oscillator[J]. Instrumental Technique,2010(4):23-27.(in Chinese)
[6] 杜晓辉,施浒立,张丽荣,等. 一种转发式卫星授时新方法[J].天文研究与技术,2012,1(12):38-42.DU Xiao-hui,SHI Hu-li,ZHANG Li-rong,et al.A New Timing Method for Satellite Relay System[J].Astronomical Research and Technology,2012,1 (12):38- 42.(in Chinese)
[7] 王平利,程华军,林思佳,等.基于GNSS CV 的精密时间服务系统的设计与实现[J]. 时间频率学报,2012(3):11-16.WANG Ping-li,CHENG Hua-jun,LIN Si-jia,et al.Design and Implementation of Precise Time service system based on GNSS CV[J].Journal of Time and Frequency,2012(3):11-16.(in Chinese)
[8] 黄波,胡修林.“北斗”2 导航卫星星间测距与时间同步技术[J].宇航学报,2011,6(7):67-71.HUANG Bo,HU Xiu- lin. Inter Satellite Ranging and Time Synchronization for BD2[J]. Journal of Astronautics,2011,6(7):67-71.(in Chinese)
[9] Koppang P,Wheeler P.Working application of TWSTT for high precision remote synchronization[C] //Proceedings of 1998 the Annual IEEE International Frequency Control Symposium.CA,USA:IEEE,1998:27-29.
[10] Quirk K J,Srinivasan M. Analysis of sampling and quantization effects on the performance of PN code tracking loops[C]//Proceedings of 2002 IEEE International Conference on Communications. Washington DC:IEEE,2002:1480-1484.
[11] Quirk K J,Srinivasan M. PN code tracking using noncommensurate sampling[J].IEEE Transactions on Communications,2006,54(10):1845-1856.
[12] Ke T,Hu X,Liu Y,et a. l The evaluation methods of sampling rate performance in GNSS receiver[C]//Proceedings of the 3rd International Conference on Space Information Technology.Washington DC:IEEE,2009.
[13] 柯颋,胡修林,刘禹圻,等. GNSS 接收机中采样率对时间鉴别力的影响[J]. 宇航学报,2010,31(12):2722-2729.KE Ting,HU Xiu-lin,LIU Yu-qi,et al. Influence of Sampling Rate on Time Discrimination in GNSS Receiver[J]. Journal of Astronautics,2010,31(12):2722-2729.(in Chinese)
[14] 陈中平,徐淑壹,驾英茜,等.小型抗振晶体振荡器设计[J].电子科技,2014,24(4):76-78.CHEN Zhong- ping,XU Shu- yi,JIA Ying- qian,et al.Design of A Miniature Anti-Vibration Cristal Oscillator[J]. Electronic Science & Technology,2014,24(4):76-78.(in Chinese)
[15] 王琦,吴斌.航天测控系统中伪码测距精度分析[J].测控遥感与导航定位,2009,39(1):39-42.WANG Qi,WU Bin. Analysis on Precision of Pseudo Noise Code Ranging in Space TT&C Systems[J].Measurement and Control of Remote Sensing and Navigation,2009,39(1):39-42.(in Chinese)
[16] 刘宁,刘雪瑞.GPS 软件接收机精确载波频率捕获算法分析与实现[J].全球定位系统,2011,11(2):36-39.LIU Ning,LIU Xue-rui.Analysis and Implementation of Precise Carrier Frequency Capture of GPS Reciever[J].Global Positioning System,2011,11 (2):36- 39.(in Chinese)
猜你喜欢
河北大学学报(自然科学版)(2020年2期)2020-05-22
长春工程学院学报(自然科学版)(2019年1期)2019-05-22
制造技术与机床(2017年6期)2018-01-19
组合机床与自动化加工技术(2017年1期)2017-02-15
电子制作(2017年23期)2017-02-02
电测与仪表(2016年24期)2016-04-12
探测与控制学报(2015年4期)2015-12-15
探测与控制学报(2015年4期)2015-12-15
国防科技大学学报(2015年3期)2015-03-09
电测与仪表(2014年18期)2014-04-04