实现飞机状态监视的ACARS 数据链新应用*
2014-03-18 05:52:00张力支
电讯技术 2014年11期
张力支
(中国西南电子技术研究所,成都610036)
1 引 言
国际上较多航空公司将飞机通信寻址与报告系统(ACARS)等地空数据链系统与技术[1]作为飞行运行控制与服务、飞机/发动机远程状态监视与故障诊断等重要业务的实现手段。波音、空客、ARINC、SITA、霍尼韦尔、柯林斯等开发出航空公司应用、空中交通管理与服务应用等诸多方面的自动化信息处理系统,这些自动化信息处理系统的投入使用,一方面为航空公司的整体运营节省了大量成本,提高了航空公司与空中交通管制部门的工作效率,另一方面提高了飞机的日利用率和飞行安全保障能力。在法航447 空难中,通过飞机坠毁前发送的ACARS 报告获取了飞机的大致位置以及出现的故障信息,使法航在短时间内找到了飞机部分残骸,并为分析事故原因提供了帮助。法航447 空难和马航370 失联事件使ACARS 地空数据通信功能为大众所了解的同时,暴露了现有数据链应用提供信息广度和实时性上的不足,衍生出ACARS 数据链的新应用需求。
2 飞机通信与监视
航空公司作为飞机所有者对航班运营进行管理控制,期望得到飞机的状态和维护数据,空管中心和机场塔台等部门因为空中交通管理的要求,需获取飞机的三维位置、速度等信息,航空公司和空管部门的上述需求离不开飞机通信导航监视系统的支持。
2.1 常用通信与监视方式
地面空管部门主要通过早期的一次雷达和A/C/S模式二次雷达实现对飞机的监视,基于数据链技术的自动相关监视也正逐渐应用,但两者都受限于空域范围,空管部门只能获取飞机位置、高度、速度、方位等有限信息。话音通信是地面单位与飞行员的最常用交互方式,但存在通信速度慢、易出错、多信息限制和业务种类受限等缺点。数据通信具备信息量大、抗干扰能力强、准确度高以及可与自动化系统协调发展等优点,民航ACARS 数据链已广泛应用于空中交通服务(ATS)、航空公司运营控制(AOC)、航空行政管理(AAC)、旅客服务(APC)等领域。
2.2 ACARS 用于获取飞机状态
飞机飞行过程中大部分实时参数和状态信息在飞行数据记录仪中进行保存,由于ACARS 数据链传输速率为2.4 kb/s,只有位置和故障等少量信息通过ACARS 自动发送至地面。ACARS 支持的AOC应用能周期(通常10 min)向地面发送位置报告[2],包含当前时间、经纬度、高度、剩余油量、校正空速等,地面能够了解的飞机状况有限且实时性不高。航空公司期望,特别是航行途中遭遇紧急情况或出现故障的情况下,能更实时掌握更多的飞机状态信息,比如飞机俯仰角、航向等飞行参数,发动机转速、排气温度等发动机参数,飞管、电源等系统的状态,以及故障告警信息。目前ACARS 数据链应用尚不支持上述大量信息的实时下传,航空公司只能在飞机着陆后通过专用设备从飞行数据记录仪中读取。
本文提出一种基于ACARS 数据链的飞机状态监视应用,通过升级飞机ACARS 数据链应用终端的AOC 应用,为地面用户提供一种能够实时全面监视飞机状态的方法。
3 飞机状态监视应用
飞机状态监视应用体现为,通过一系列的方法步骤形成特定的信息处理和组包方式,能够间接提升ACARS 数据链的有效信息传输速率,相比于传统AOC 应用能够负载更丰富的飞机状态信息。
3.1 在数据链体系中的位置
按照功能层次分类,机载数据链系统可分为数据链应用、数据链协议和通信子网三部分,如图1所示。飞机状态监视应用可归类于AOC,以软件形式驻留在飞行管理计算机或通信管理单元(CMU)的数据链AOC 应用模块[3]中。
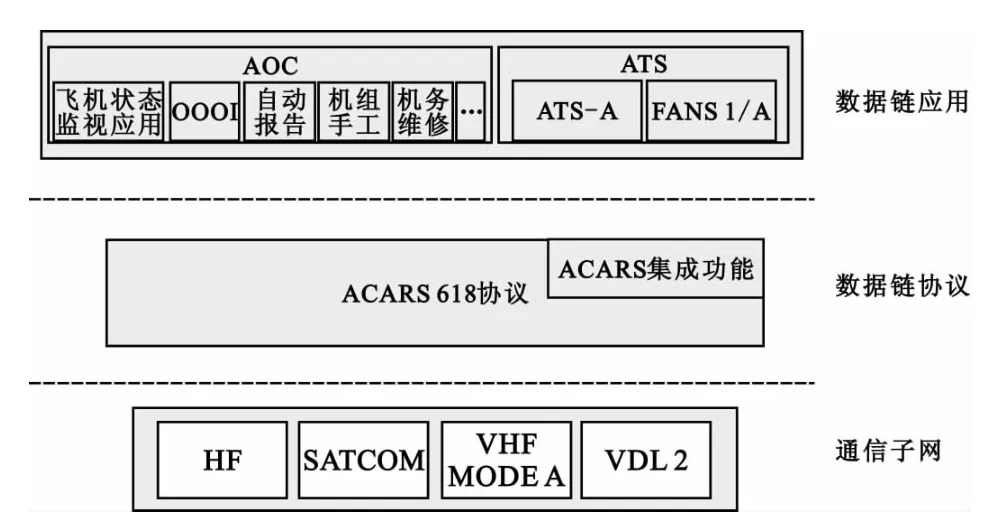
图1 机载数据链系统功能结构Fig.1 Functional framework of airborne datalink system
3.2 实现步骤
飞机状态监视应用分为飞机信息处理、消息封装、数据压缩和信息编码4 个步骤,如图2所示。
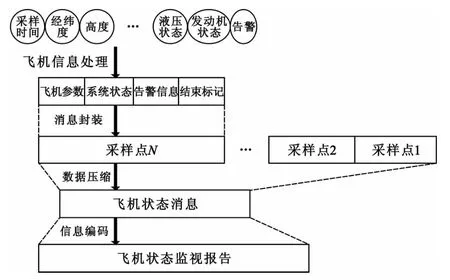
图2 飞机状态监视应用实现步骤Fig.2 Implementation step of aircraft condition monitoring application
3.2.1 飞机信息处理
从飞机系统获取各种信息,按照预先定义的数据格式顺序排列成比特数据流,形成单个时刻的采样点信息。该信息分为飞行参数字段、系统状态字段、告警信息字段和结束标记四部分:飞行参数字段填写从飞机各个系统获得的飞行参数信息,例如经纬度、气压高度、俯仰横滚角、航向、速度、风向风速、温度、预计到达时间等,可配置选用全部或部分飞行参数;系统状态字段填写飞管、电传、液压、电源、起落架、轮载等系统的状态和工作模式,以及发动机参数、襟翼副翼角和方向舵配平位置等信息;若当前存在故障或告警,则将告警码按顺序放入告警信息字段,告警码是对飞机定义的所有故障或告警信息进行的数字编码,能唯一代表某个故障或告警;结束标记表示单个采样点的飞机状态信息的结束,同时也是区分两个采样点的标识,结束标记的每个比特位填1,以避免与告警码数值相同。
3.2.2 消息封装
经过一次飞机信息处理形成某一时刻的飞机状态采样点,按照一定采样间隔可获取一段连续时间内多个时刻产生的采样点信息。消息封装过程即将当前时刻获取的采样点信息与之前缓存的多个采样点共同组成一包飞机状态消息,时间越靠近当前时刻的采样点在飞机状态消息中的位置越靠前。采样间隔时间可根据用户需求配置。
3.2.3 数据压缩
数据压缩过程使用数据压缩算法对包含多个采样点信息的飞机状态消息进行数据压缩,压缩算法包括动态马尔可夫压缩算法、DEFLATE 算法等无损数据压缩算法[4]。数据压缩过程是可选操作,具体选用哪种压缩算法可预先配置,其中动态马尔可夫压缩算法是第一马尔可夫模型和Guazzo 的算术编码算法的结合,具有两种优化等级,机载设备数据存储资源有限,选取优化等级0。
3.2.4 信息编码
信息编码过程即对压缩后的数据从比特流形式转换为字符形式。为了在转换过程中产生较小冗余信息,可从ASCII(ISO#5)编码表[1]中选出64 个可显字符形成信息编码表,将比特数据流每6 比特转换成8 比特的ASCII 字符,经过信息编码后信息长度将在原有信息的基础上增加1/3。
3.2.5 处理流程
飞机状态监视应用的每一次处理过程都由采样计时器触发。采样计时器到期后首先从飞机系统获取的各种飞行参数、系统状态和告警信息,按照消息格式将各个数据分别填入飞行参数字段、系统状态字段、告警信息字段和结束标记字段,形成单个采样点的飞机状态信息;然后将当前时刻采样点信息放在之前缓存的飞机状态消息之前,组成新的消息,缓存该条新飞机状态消息。若配置了数据压缩选项,则根据选用的压缩算法对飞机状态消息进行数据压缩,并进行信息编码,将飞机状态消息从比特流形式转换为字符形式。若转换后的消息长度仍小于210个字节,则等待下一个采样时刻到来时重新进入飞机状态监视应用处理流程。若转换后的消息长度等于或超出210 个字节,则将信息编码后的消息作为飞机状态监视消息的正文,送入ACARS 消息发送队列,并清空之前缓存的飞机状态消息。其应用处理流程如图3所示。
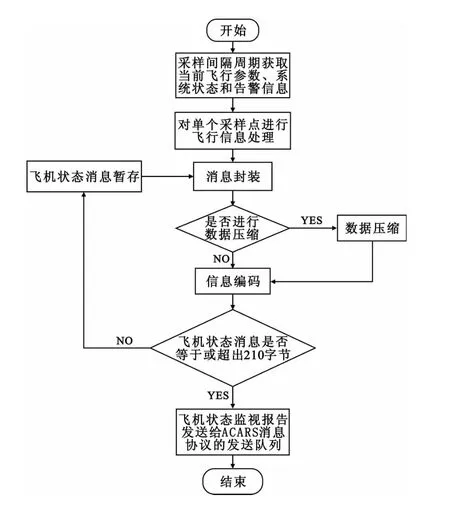
图3 应用处理流程图Fig.3 Flow chart of application processing
每条ACARS 消息都需要一个2 字符标号用于表示消息类型,ACARS 飞机状态监视消息作为用户定义的消息需按规定在“10”到“4~”范围[5]内选取标号。
3.3 特点
本方法中数据以比特形式组包,相对于字符形式能够承载更多信息,同时通过数据压缩进一步提升了信息容量。以数字类型的信息为例,本方法相比传统AOC 消息最小有4.5 倍的提升。地面终端部门在配置相应的处理系统后,能够还原飞机飞行过程,实时了解各时刻飞机的飞行参数和系统状态,还能根据飞机下传的故障和告警信息,提前启动保障维修措施,提高飞机的日利用率和飞行安全保障能力。图4为信息容量扩展示意图。

图4 信息容量扩展示意图Fig.4 Diagram of information capacity increasing
飞机状态监视应用具有如下特点:
(1)既包含实时飞行参数,又涵盖飞机各系统工作模式状态以及故障告警信息,为地面用户实时全面地了解飞机状态提供了便利;
(2)在源端使用的信息都是面向比特的,相比于传统面向字符的ACARS 应用,能够承载更多信息;同时在信息编码后仍能通过ACARS 数据链网络进行传输,间接提升了ACARS 数据链的有效信息传输速率;
(3)数据压缩过程进一步提高了飞机状态消息的数据容量,在采样间隔固定的情况下,能收集更多的采样点,使地面终端能更真实的还原飞行场景;
(4)飞机状态监视报告中具体的飞行参数、系统状态和告警信息,可根据用户需求配置;另外,采样间隔也可配置,体现了应用的灵活性。
3.4 仿真验证
采用CMU 作为数据链终端的系统架构[6]构建ACARS 数据链机载和地面验证系统,如图5所示。自研的CMU 采用PowerPC 处理器和VxWorks 实时操作系统,参照ARINC758[3]规范实现CMU 服务能力等级0.1 级,应用能力等级为A 级,飞机状态监视应用驻留在CMU 的AOC 软件模块中,机载VHF 电台采用柯林斯公司产品VHF-2100;航电仿真平台模拟来自数据链控制显示信息以及来自航电平台的飞机导航、状态、告警等信息。地面接收端采用澳大利亚ADS 公司VGS-1000-16H 电台;DSP 模拟软件实现空地消息协议的处理和转发;航空公司应用终端驻留仪表服务器软件和飞机系统状态/告警软件,实现对飞机状态监视消息的解析和显示,其中仪表服务器软件使用SCADE Display 工具开发,模拟座舱界面真实还原飞行状态,还可显示飞行航迹和飞行剖面。
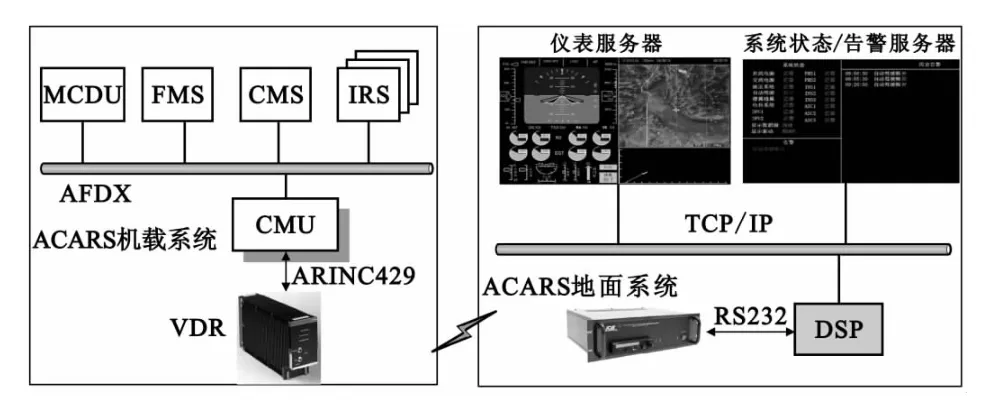
图5 飞机状态监视仿真系统Fig.5 Simulation system of aircraft condition monitoring
仿真试验中封装的单个采样点包含576 比特信息,其中飞行参数信息包括时间、经纬度、气压高度、无线电高度、俯仰角、横滚角、航向、指示空速、真空速、地速、垂直速度、风向、风速、总温、静温、剩余燃油、航路点名称及预计到达时间;飞机状态信息包括飞管、电传、惯导、液压、电源、起落架、轮载系统的工作模式和状态,以及发动机转速、发动机排气温度、襟翼角、副翼角、油门杆高度和方向舵配平位置;每个采样点中最多包含5 个告警信息。在不使用数据压缩算法的情况下,一个采样点含一包ACARS 消息中可包含2 个采样点。无需地面应答时,极限情况下2 s周期发送飞机状态监视ACARS 消息可满足高实时性要求。
4 结束语
航空地空数据链技术的进步和航空电信网的发展能为应用部门提供更多样化的服务,然而出于经济效益的考虑,航空公司飞机的更新换代以及民航地面网络的建设是一个长期的过程。现有的ACARS 网络已应用了30 多年,并仍将在未来较长时间内继续为航空公司和空管等部门提供服务。
本文提出基于ACARS 数据链的飞机状态监视应用符合现有数据链体系,通过设备软件升级等低成本手段扩展数据链应用,仿真验证结果表明本文方法能在有限的ACARS 带宽内传输更丰富的信息,便于航空公司等地面用户更好的掌握飞机状态,具有较好的应用价值。
[1] ARINC specification 618-6,Air/ground character-oriented protocol specification[S].
[2] AC-121-FS-2008-16R1,航空运营人使用地空数据通信系统的标准与指南[S].AC-121-FS-2008-16R1,Standard and Guide for Aircraft Operators to Use Ground-to-air Data Communication System[S].(in Chinese)
[3] ARINC characteristic 758-2,Communications management unit(CMU)Mark 2[S].
[4] ARINC specification 823-1,Datalink security.Part 1-ACARS message security[S].
[5] ARINC specification 620-6,Datalink ground system and interface specification[S].
[6] 张力支.机载甚高频ACARS 数据链系统及通信管理单元设计[J].电讯技术,2011,51(12).ZHANG Li-zhi.Design of Airborne VHF ACARS Data Link System and Communication Management Unit[J].Telecommunication Engineering,2011,51(12):101-104.(in Chinese)
猜你喜欢
大众投资指南(2021年23期)2021-12-06 05:46:52
大飞机(2021年4期)2021-07-19 04:46:34
军民两用技术与产品(2021年10期)2021-03-16 06:05:10
中国交通信息化(2020年7期)2021-01-14 03:18:14
铁道通信信号(2019年9期)2019-11-25 01:44:54
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
北京航空航天大学学报(2017年3期)2017-11-23 05:14:54
汉语世界(The World of Chinese)(2017年6期)2017-09-30 07:01:14
电讯技术(2017年4期)2017-04-16 04:16:03
中国市场(2016年45期)2016-05-17 05:15:40