MicroCT系统软件平台的设计与实现
2014-03-18 02:57戎军艳廖琪梅刘文磊卢虹冰
医疗卫生装备 2014年12期
高 鹏,戎军艳,廖琪梅,刘文磊,卢虹冰
MicroCT系统软件平台的设计与实现
高 鹏,戎军艳,廖琪梅,刘文磊,卢虹冰
目的:设计实现MicroCT系统软件平台,解决实验室的MicroCT数据采集、投影仿真以及图像重建等问题。方法:以实验室现有MicroCT系统为基础,以Visual Studio 2010及其MScomm组件作为开发平台,编写相应的程序,设计实现MicroCT系统软件平台。结果:设计并实现了MicroCT系统软件平台,能够准确采集MicroCT数据并重建,有利于科研工作的开展。结论:该软件平台的设计实现满足了利用MicroCT进行科研的需要,对进行科研实验有重要意义.
MicroCT;软件平台;投影;重建
0 引言
MicroCT(微型CT、显微CT)是一种可测定体素的空间分辨率小于100的X线三维成像系统,具有空间分辨率高、焦点小、管电压低、管电流小等特点。1981年,L.A.Feldcamp等[1]首先开发出了MicroCT系统,并提出了基于锥束投影的FDK(Feldkemp-Davis-Kress)重建算法。随着医疗设备和成像技术的发展,MicroCT已广泛应用于医学、药学、生物等领域。为了实现对较大动物进行大视野CT成像,实验室购置了X线管、X线探测器以及精密光学平台等MicroCT系统的相关设备。为了尽快将MicroCT投入科研使用,实验室迫切需要一个集数据采集、校正以及重建于一体的软件平台。为此,本研究设计出一个利用串口通信以及医学图像处理技术,在现有Micro-CT系统下进行数据采集、投影仿真以及图像重建的软件平台,并通过对MicroCT系统的分析与设计,阐述了该软件平台的设计思路、功能设计和系统功能性测试。
1 系统设计
1.1 设计思路
首先,分析利用MicroCT系统进行实验的过程和需求;其次,选定合理的软件开发平台和技术,从稳定性和兼容性以及开发难易程度考虑,选择Microsoft Visual Studio 2010作为开发工具;最后,根据需求设计该软件平台所需要的功能模块,测试其运行效果。
1.2 功能设计
MicroCT软件平台包括扫描控制与数据采集模块、投影数据仿真模块、重建模块3部分,其系统结构如图1所示。
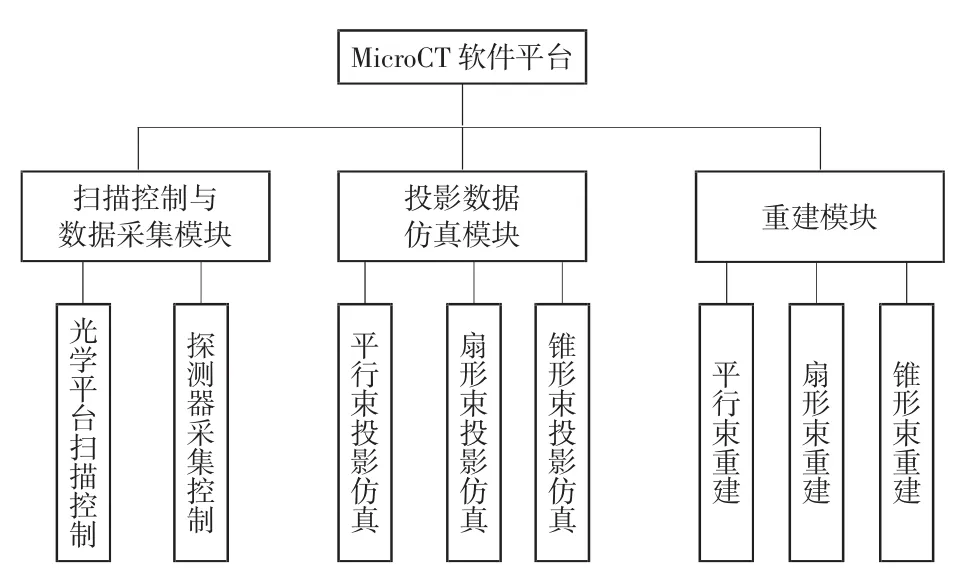
图1 MicroCT系统软件平台的总体结构
扫描控制与数据采集模块可以实现对光学平台进行旋转和平移的控制、对探测器采集数据的控制;投影数据仿真模块包括平行束投影仿真、扇形束投影仿真和锥形束投影仿真3部分,实现了对某一个模型的不同方式的投影;重建模块可以对仿真或者实验得到的平行束、扇形束和锥形束投影进行重建。系统主界面如图2所示。
图2 MicroCT系统软件平台
1.2.1 扫描控制与数据采集模块
(1)光学平台扫描控制。光学平台扫描控制模块提供给用户选择串口,选择平台坐标轴,设置运行初速度、加速度及机械参数等功能。模块界面如图3所示。

图3 光学平台扫描控制模块
本实验室中所有的MicroCT系统设备都置于卓立汉光光学平台上。该系统采用的是小动物旋转机械结构静止型结构[2],在采集MicroCT数据时需要控制光学平台各个轴的旋转和平移。控制轴与计算机的串口相连,利用光学平台的串口通信协议,通过串口发送指令控制其移动[3-4]。在程序实现时,使用了Microsoft提供的串口通信控件和串口通信类MScomm[5-6],保证了程序的便捷性和兼容性。以设置某个轴的初速度为例,光学平台的控制流程如图4所示。
实验室共有3台光学平台控制箱,控制包括旋转和平移在内的7个轴。用户在操作时除了能用step作为轴的默认位移单位外,还可以在本模块中选择“mm”“(°)”等单位,为MicroCT系统的使用提供了方便。
(2)探测器采集控制。连续采集MicroCT数据并且快速保存是获取实验数据的关键一环。本模块实现了单幅和连续MicroCT图像数据采集功能。利用探测器提供的应用程序开发包,编写相应代码即可。数据采集步骤:①探测器初始化;②设置曝光时间、旋转台转速、探测单元合并模式、数据校正的参数;③选择数据采集模式进行采集。
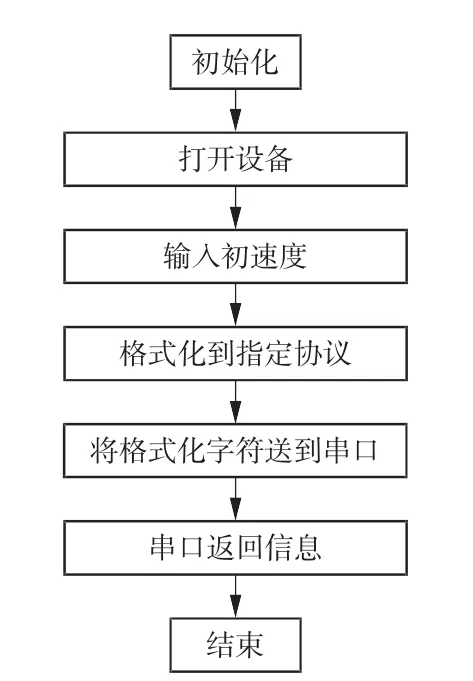
图4 设置轴的初速度流程
由于MicroCT对工作时长有较高的要求,在本模块实现过程中,为了提高数据读写速度,采用多线程技术,令MicroCT数据的采集和保存同步进行,大大提高了工作效率。
平板探测器的性能缺陷是产生切片伪影的最大因素,其性能缺陷主要体现在暗电流、光场不均匀性和坏像素上。为此,需要进行以下校正:①暗场校正[7]。关闭射线源,在相同的实验条件下采集多幅暗场图像,平均后得到图像D。实验图像M减去暗场平均图像D即完成暗场校正。②亮场校正。保证视野内没有物体,开启射线源,在相同实验条件下采集多幅亮场图像,平均后得到图像F。校正后图像C=(F中所有像元的平均值)×(实验图像M-暗场图像D)/(亮场图像F-暗场图像D)。③坏像素点校正。利用开发包中提供的坏像素图像和函数DefectCorrtion()进行校正。
1.2.2 投影数据仿真模块
在实验过程中,有时候为了验证算法的可行性,需要仿真产生投影数据。平行束、扇形束和锥形束投影的产生原理以及实现过程类似,在此以锥形束投影数据产生模块的实现为例,介绍其实现过程。投影数据生成采用的是快速射线追踪技术。
程序运行时需要用户首先输入一幅图像作为产生投影数据的模型;然后输入仿真条件,包括模型的长、宽、高,探测器长、宽等相关参数,以及系统参数SOD、SDD等。投影算法会根据上述仿真条件,产生仿真数据并保存。模块界面如图5所示。
图6展示的是锥形束投影仿真结果。输入图像是由Matlab产生的3D 128像素×128像素×128像素头模型。投影角度360个,探测器尺寸为256像素×256像素,SOD和SDD分别为300像素、500像素。
1.2.3 重建模块
无论是仿真数据还是实际利用MicroCT系统采集得到的实验数据,只有对其重建,得到重建图像才能进行更深一步的科学研究。重建模块实现的是从投影数据中重建获得图像的功能,采用经典的滤波反投影方法进行重建[8-9]。在运行程序时,用户首先选择投影文件,投影文件既可以是在投影数据仿真模块中产生的仿真数据,也可以是实验室中用MicroCT系统采集得到的实际数据。
在参数设置上应当注意与获取投影数据时的相关参数保持一致。在图像重建的过程中,为了提高重建图像的质量,去除某些噪声,本模块提供了多种滤波器可供用户使用,最大程度地满足用户不同重建需求下对滤波器的使用要求。
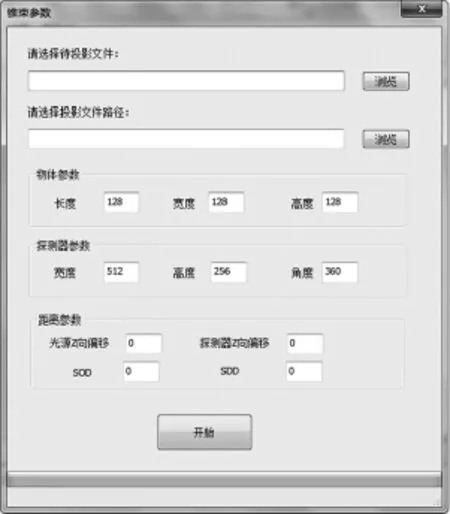
图5 锥形束投影仿真模块
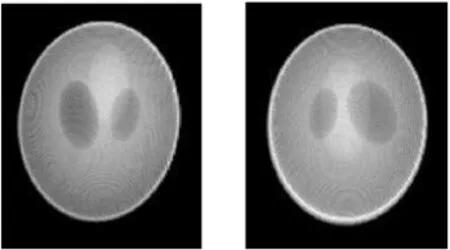
图6 不同角度下锥形束投影仿真结果
2 软件平台的应用性及测试
MicroCT系统软件平台无需进行任何安装和调试,且兼容性良好,能够很好地满足不同使用环境的需要。
为了尽量缩短MicroCT连续工作的时间,需尽可能快地实现MicroCT数据的读写工作,故MicroCT系统软件平台对所安装计算机配置有较高要求。
本软件平台目前已经正常工作并应用于小鼠MicroCT数据采集和重建。在扫描360°、旋转台速度8°/s、300 ms积分时间、1 xlbinning的条件下,采集小鼠360幅投影共计耗时182 s。X线源采用的电压和功率分别是40 kV、40 W。在该软件平台下重建的结果如图7所示。
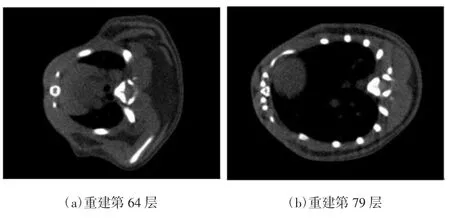
图7 小鼠重建断层
实验过程中,X线源、探测器、计算机均能正常响应并工作,完全可以满足实验需求,达到了预期的效果。
3 讨论
MicroCT的高分辨率特点使之能够在小动物无创伤的活体研究中取得广泛应用。本软件平台基于实验室MicroCT系统,根据科研实验需要而开发,多次实验结果表明,该软件平台不仅操作简单、界面直观,而且具有很好的稳定性。该系统已于2013年申请软件著作权成功,编号为2013SR130603。在下一步科研实验过程中,将根据具体的实验要求对该软件平台进行改动,使之更好地为科研服务。
[1]Feldcamp L A,Davis L C,Kress J W.Practical Cone-beam algorithm[J].J Opt Soc Am Al,1984,1(6):612-619.
[2]黄力宇,赵静,李超.医学影像的数字处理[M].北京:电子工业出版社,2012:40-43.
[3]龚建伟,熊光明.Visual C++/Turbo C串口通信编程实践[M].北京:电子工业出版社,2004:46-48.
[4]谭思亮,邹超群.Visual C++串口通信工程开发实例导航[M].北京:人民邮电出版社,2003:74-79.
[5]谢新武,贺志强,韩超,等.一种基于PC的X线机控制台的设计[J].医疗卫生装备,2008,29(7):26-28.
[6]朱有存,白青伟,杨晓荣,等.利用Mscomm32控件实现检验仪器联机[J].医疗卫生装备,2008,29(6):55-56.
[7]刘晓鹏.锥束工业CT图像校正技术研究[D].西安:西北工业大学,2006.
[8]庄天戈.CT原理与算法[M].上海:上海交通大学出版社,1992.
[9]曾更生.医学图像重建入门[M].北京:高等教育出版社,2009:56-62.
(收稿:2014-03-26 修回:2014-06-16)
Design and accomplishment of MicroCT system software platform
GAO Peng,RONG Jun-yan,LIAO Qi-mei,LIU Wen-lei,LU Hong-bing
(School of Biomedical Engineering,the Fourth Military Medical University,Xi'an 710032,China)
To design and realize MicroCT system software platform to collect,correct and reconstruct MicroCT data.Visual studio 2010 and MScomm groupware were used to design and accomplish MicroCT system software platform while using MicroCT system in the laboratory.MicroCT software platform was designed,which could accurately collect,reconstruct MicroCT data and was beneficial to scientific research.The realization of the software platform meets the desire of scientific research using MicroCT,and is of great importance for scientific research. [Chinese Medical Equipment Journal,2014,35(12):22-24]
MicroCT;software platform;projection;reconstruction
R318.6;TP311.1
A
1003-8868(2014)12-0022-03
10.7687/J.ISSN1003-8868.2014.12.022
国家科技支撑计划课题(2011BAI12B03);中国博士后科学基金(2012M521863)
高 鹏(1990—),男,助教,主要从事医学图像处理方面的研究工作,E-mail:xiangzhiwanli@163.com。
710032西安,第四军医大学生物医学工程学院(高 鹏,戎军艳,廖琪梅,刘文磊,卢虹冰)
卢虹冰,E-mail:luhb@fmmu.edu.cn
猜你喜欢
数学物理学报(2021年1期)2021-03-29
装备制造技术(2020年11期)2021-01-26
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
国学(2020年1期)2020-06-29
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
中国医学影像学杂志(2018年9期)2018-10-17
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
通信电源技术(2016年4期)2016-04-04