
基于D-H参数方法的微创手术机器人运动仿真研究
2014-03-17 10:51王东辉
医疗卫生装备 2014年11期
哈 乐,王东辉
基于D-H参数方法的微创手术机器人运动仿真研究
哈 乐,王东辉
目的:为了更好地研究外科微创手术机器人的工作性能,提出一种基于D-H参数方法的机器人运动仿真研究方法。方法:通过分析机器人各关节的几何关系,建立其D-H参数模型,分别对机器人系统进行正运动学和逆运动学分析,利用Matlab软件中的SimMechanics模块对机器人机电系统进行建模和仿真实验。结果:仿真实验结果表明,末端执行机构的期望轨迹与实际轨迹基本一致,运动误差都在实际允许范围内,验证了机器人运动学仿真研究方法的正确性。结论:采用D-H参数方法对微创手术机器人进行运动学仿真分析具有很好的实用性和准确性,对外科手术机器人的精密设计和系统改进具有普遍的适用意义。
手术机器人;D-H方法;运动仿真;正运动学;逆运动学
0 引言
1985年,Payne和Wickham首次提出了微创外科(minimal invasive surgery,MIS)的概念,即外科医生在患者身体上开2个或3个小孔,1个用于插入内窥镜,另外1个或2个用于插入细长的手术工具,医生通过监视器观察插入患者体内的工具端部运动来进行外科手术[1-2]。与传统打开式手术相比,MIS能使手术对健康组织的创伤最小化,能够很大程度减少患者的痛苦,降低伤口感染的风险,缩短术后恢复的时间,因此,很快被应用到各种外科手术中。目前,MIS主要用于腹腔镜外科、胸外科、关节外科、血管外科、骨盆镜外科手术中等。
随着科学技术的不断发展,医疗机器人系统在医学外科领域越发普及,微创手术机器人因其具有操作准确、易操作、创伤小等优点被广泛应用[3-5]。为了更好地了解其工作性能,需要对其运动学特性进行研究和分析。1955年,Denavit和Hartenberg提出关于用齐次变换矩阵描述机器人各关节之间的几何关系的方法[6](D-H参数方法)。本研究利用D-H参数方法建立机器人系统的运动学模型,分别对其正运动学和逆运动学方程进行计算,通过系统仿真实验的方式验证D-H模型的正确性,从而证明该方法的可行性。
1 D-H参数模型
1.1 D-H参数方法
机器人的运动学研究的是机器人各个杆件之间的位移关系、速度关系和加速度关系。在进行机器人运动学分析时,需要在空间中为机器人的每一个杆件设置绝对坐标系或者对机器人基座设置相对坐标系,从而获得每一个杆件的位置及方向。D-H参数法用一个4×4的齐次变换矩阵描述相邻2个连杆的空间关系,从而推导出“末端执行器坐标系”相对于“基坐标系”的等价齐次坐标变换矩阵,建立系统的运动方程。
选择6-DOF微创手术机器人作为研究对象(如图1所示)。该机器人包括3个主动关节和3个被动关节,通过电动机驱动主动关节实现对末端手术器械的位置调整,被动关节用来克服患者切口的约束作用,实现微调功能。

图1 微创手术机器人结构示意图
机器人运动学的研究存在正运动学和逆运动学2类基本问题。正运动学,是指给定机器人各个关节的参数,计算机器人末端手爪的位置和姿态;逆运动学,是指已知机器人末端手爪的位姿,通过运动学方程求解机器人相应的关节变量。通过对机器人运动学特性的研究,为机器人关节控制和轨迹规划提供理论支撑。
1.2 正运动学模型
通过分析机器人各连杆及转动关节间的相互位置关系,利用D-H参数法建立机构坐标系,选择机器人与大地相连的点O为基准点,建立基准坐标系(如图2所示)。

图2 微创手术机器人的D-H参数模型
令T为位姿变换矩阵,n、o、a分别为x、y、z坐标轴的单位方向矢量,即

其中,平移坐标变换为

将机器人机器臂连杆参数带入得

式中:ai为zi-1到zi沿xi方向的距离;αi为zi-1到zi绕xi旋转的角度;di为xi-1到xi沿zi-1方向的距离;θi为xi-1到xi绕zi-1旋转的角度。
机器人末端执行器相对于基础坐标系的O0(x0,y0,z0)位姿的坐标变换矩阵为

根据图2,确定微创手术机器人的连杆参数(见表1)。

表1 微创手术机器人连杆参数
则机器人的坐标系变换矩阵为

机器人运动学正解:

式中:si=sin θi;ci=cos θi;sij=sin(θi+θj);cij=cos(θi+ θj)。
1.3 逆运动学模型
由于手术机器人具有3个被动关节,其位姿信息可由传感器直接测得。设手术切口点的坐标系为q(qx,qy,qz),则机器人末端手术器械的空间矢量k为
k=(px-qx,py-qy,pz-qz)
在机器人基础坐标系中,末端手术器械与坐标轴的方向角α、β、γ分别为

根据手术器械方位角与机器人关节转角的位置关系,求得机器人姿态关节转角为

根据机器人位姿模型反解机器人主动关节1、关节2、关节3中的未知参数值分别为

式中


2 机器人运动控制系统建模仿真
机器人的控制系统是指机器人的运动输出参数能够按照控制输入进行调节的系统[7-8]。根据控制原理的不同,分为开环控制系统和闭环控制系统。在开环控制系统中,系统输出受到输入的控制,控制精度和抑制干扰的特性都比较差,往往在低精度运动条件下采用。闭环控制系统是建立在反馈原理的基础之上,利用输出量同期望值的偏差对系统进行控制,因此能够得到相对较好的控制性能[9-10]。
由于手术机器人对系统运动的精度要求较高,因此基本都采用闭环控制系统。本文采用Matlab中SimMechanics模块对机器人的机电系统建模,根据手术机器人的机械结构,建立SimMechanics模型。运动控制选用基于速度和位置的双闭环控制方法实现对手术机器人运动的精确控制。控制原理如图3、4所示。
上述控制系统的核心是数字控制器的选择,考虑到所需控制器需对微创手术机器人的主动关节进行实时控制,为了保证控制参数调节简单,控制参数易于整定并且相互独立,最终选用PID控制器。手术机器人各关节均采用电动机驱动,因此传感器采用光电编码器实现速度和位置的测量。

图4 双闭环控制系统
微创机器人的期望轨迹为执行端手术器械实际需要的运动轨迹,选择xy平面进行末端轨迹仿真。将期望轨迹的各点位置通过运动学方程转化为各个关节的运动变化输出,通过与关节传感器检测到的数值反馈进行比较,经过PID控制器调节后输送给电动机控制模块,从而驱动各个关节到达运动位置。末端执行机构期望轨迹起点为(20,20)(单位:mm),终点为(60,30)(单位:mm),仿真结果如图5所示。
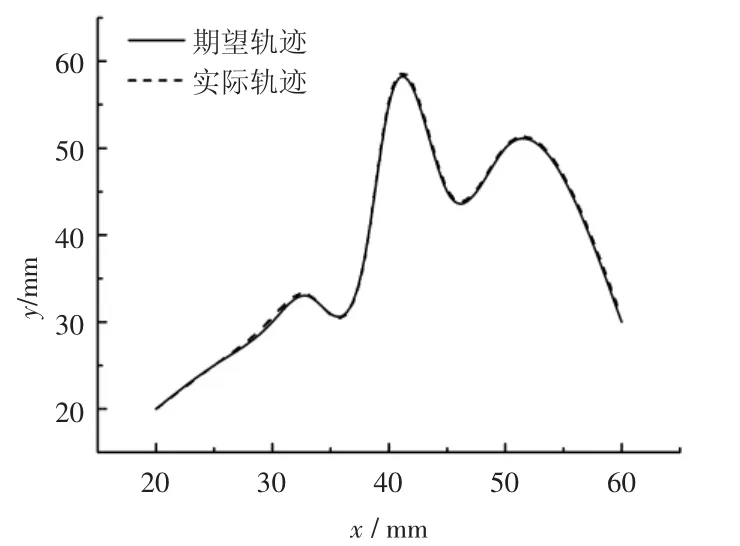
图5 末端执行机构运动轨迹
仿真结果表明,实际轨迹与期望轨迹基本重合。可见,手术机器人末端执行机构较为准确地跟踪了期望轨迹,在极限位置方向转换时误差稍大,但误差最大不超过0.1 mm,在误差允许范围之内,验证了运动模型的正确性。
3 结论
随着微创外科的不断发展,越来越多的手术机器人被应用到外科手术中,本文提出一种基于D-H参数模型的机器人运动学研究方法,该方法能够根据机器人各连杆及转动关节的位置关系得到机器人的运动学方程,进而找到运动学规律。系统仿真实验结果表明,机器人末端执行机构的期望轨迹与实际轨迹基本一致,运动误差都在实际允许范围内,验证了机器人运动学模型的正确性,从而证明了采用
(▶▶▶▶)(◀◀◀◀)D-H参数方法对微创手术机器人进行运动学仿真分析具有很好的实用性和准确性,其对未来手术机器人的精密设计和系统改进具有普遍的适用意义。
[1]刘少强,黄惟一,王爱民,等.用于微创外科手术的遥控机器人系统研究现状及趋势[J].机器人,2002,24(3):283-288.
[2]Dario P,Guglielmelli E.Robotic for medical applications[J].IEEE Robotics and Automation Magazine,1996,9:44-56.
[3]王田苗,宗光华,张启先.新应用领域的机器人——医疗外科机器人[J].机器人技术与应用,1997,18(2):603-606.
[4]Daio P.Robotics in medicine[J].Internal Progress Report,ARTS Lab,1993,5:739-752.
[5]Chapman W H,Albrecht R J,Kim V B,et al.Computer-assisted laparoscopic splenectomy with the daVinci surgical robot[J].Journal of Laparoendoscopic& Advanced Surgical Techniques,2002,12(3):155-159.
[6]Denavit J,Hartenberg R S.A kinematic notation for low-pair mechanisms based on matrices[J].Trans ASME J Appl Mech,1955,23:215-221.
[7]Loi-Wah Sun,Van Meer,Chung Kwong Yeung.Design and development of a DaVinci surgical system simulator[C]//Proceedings of the Mechatronics and Automation International Conference.New York:IEEE Press,2007:1 050-1 055.
[8]Taylor R H,Stoianovici D.Medical robotics in computer-integrated surgery[J].IEEE Transactions on Robotics and Automation,2003,19(5):765-781.
[9]Dong-Soo Kwon,Ki Young Woo,Se Kyong Song,et al.Microsurgical telerobot system[C]//Proceedings of IEEE Int.Conf.on Intelligent Robots and Systems(IROS).New York:IEEE Press,1998:945-950.
[10]Rovettta A,Sala R,XIA Wen,et al.Remote control in telerobotic surgery[J].IEEE Trans on SMC,1996,26:438-444.
(收稿:2014-02-28 修回:2014-05-14)
Research on kinematic simulation of minimally invasive surgical robot based on D-H methodology
HA Le,WANG Dong-hui
(Department of Medical Engineering,General Hospital of Shenyang Military Area Command,Shenyang 110016,China)
ObjectiveTo study the performance of minimally invasive surgical robot,and to propose a robot motion simulation method based on D-H methodology.MethodsBy analyzing the geometric relationship of each robot joints,DH model was built for the robot analysis of forward kinematics and inverse kinematics.At last,SimMechanics module was used for the robot electromechanical system modeling and simulation.ResultsThe desired trajectory of the actuator was consistent with the actual trajectory.With the actual motion errors within the acceptable range,the correctness of D-H model was well verified.ConclusionUsing D-H methodology for the robot kinematics study and simulation is useful and proper which has universal significance for the sophisticated design and system improvement of surgical robot.[Chinese Medical Equipment Journal,2014,35(11):19-21,74]
surgical robot;D-H methodology;motion simulation;forward kinematics;inverse kinematics
R318.6;TP24;O311
A
1003-8868(2014)11-0019-04
10.7687/J.ISSN1003-8868.2014.11.019
哈 乐(1986—),男,博士,助理工程师,主要从事医学工程和医疗机器人方面的研究工作,E-mail:halescut@126.com。
110016沈阳,沈阳军区总医院医学工程科(哈 乐,王东辉)
猜你喜欢
导航定位学报(2022年2期)2022-04-11
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
现代装饰(2018年5期)2018-05-26
数学大世界(2018年1期)2018-04-12
中国三峡(2017年2期)2017-06-09
