
新型抗振晶体振荡器的分析与设计
2014-03-13 07:02徐淑壹贾英茜陈中平王占奎
电子科技 2014年6期
徐淑壹,贾英茜,陈中平,王占奎
(1.中国电子科技集团公司第13 研究所 第16 专业部,河北 石家庄 050051;2.石家庄学院电气信息工程系,河北石家庄 050035)
在车载和机载电子系统中,晶体振荡器在振动环境下的相位噪声性能越来越重要。在现代通信、导航、雷达和辨识系统中,其相位噪声对雷达探测灵敏度和通信设备传输误码率等有较大影响[1]。当雷达收发机中晶体振荡器的加速度灵敏度性能提高10 倍,系统所能提供的用户数将提高12 倍[2]。为保证电子系统在振动强烈的恶劣环境中的整体性能,必须要求晶体振荡器的相位噪声性能恶化尽可能减小,此时晶体振荡器的加速度灵敏度指标则显得尤为重要。
本文讨论了振动状态下晶体振荡器的相位噪声性能,并采用双晶体谐振器设计了一种新型抗振晶体振荡器,从而实现了加速度灵敏度补偿。测试结果显示加速度灵敏度补偿后新型抗振晶体振荡器在振动状态下的相位噪声达到-140 dBc/Hz@1 kHz,性能得到20 dB以上的优化,总加速度灵敏度性能较补偿前提高了约10 倍。
1 振动状态下的相位噪声分析
当晶体振荡器受到振动时,晶体谐振器的频率会发生微小变化,使晶体振荡器的输出频率为[3]

当晶体振荡器受到振动幅度不大的随机振动时,可假设为小信号与晶体振荡器信号的调制,且振动状态下的相位噪声可表示为[3]

式中,L 为振动状态下的相位噪声;fv为频率偏移量;f0为晶体振荡器在静止状态下的输出频率;Γ 为晶体的加速度灵敏度;G(f)为振动台的加速度功率谱密度。
由于加速度灵敏度为矢量,所以式(1)和式(2)中的总加速度灵敏度幅值为[3]

式中Γx、Γy、Γz分别为X、Y、Z,3 个方向的加速度灵敏度。
2 双晶体的加速度灵敏度分析及补偿设计
根据式(1)可知,晶体振荡器受到振动时,在时域上晶体谐振器A 的频率瞬间会朝某一方向发生微小的频率变化。这一微小的频率变化将使晶体振荡器的相位噪声发生恶化。若同时使用另一只晶体谐振器B产生一个幅值相等且方向相反的微小频率变化与晶体谐振器A 的频率相抵消,则在时域上晶体振荡器的总频率变化将会减小,如图1 所示。晶体A 与晶体B 频率变化相抵消,最终达到减小相位噪声恶化的目的[4]。图2 为双晶体的加速度灵敏度方向,图3 为新型抗振晶体振荡器的主振原理图,在主振电路中将一只晶体谐振器改为两只晶体串联使用。组成双晶体后,两只晶体的总等效加速度灵敏度为[5]

式中,LA、LB分别为晶体A 和晶体B 的等效电感;而ΓA、ΓB分别为晶体A 和晶体B 的加速度灵敏度。
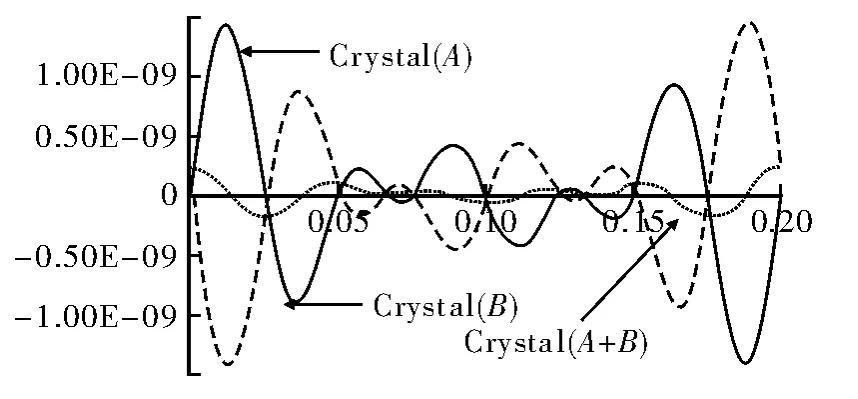
图1 加速度补偿的频率变化曲线

图2 加速度灵敏度方向
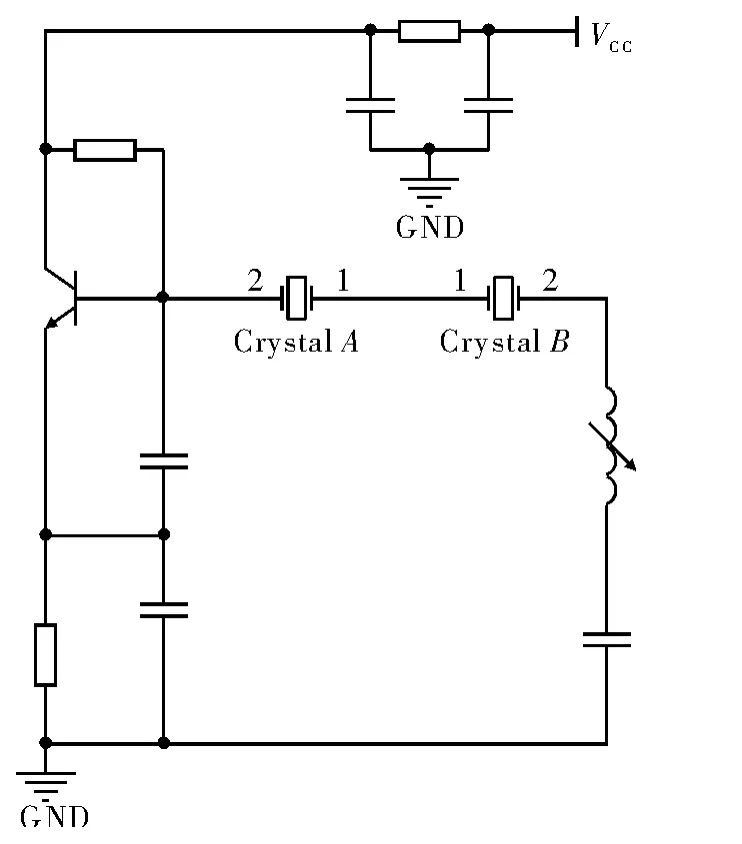
图3 主振原理图
若两只晶体的加速度灵敏度幅值相等,而方向相同,则两只晶体的总等效加速度灵敏度为

若两只晶体的加速度灵敏度幅值相等,且方向相反,则两只晶体的总等效加速度灵敏度为0

若两只晶体的加速度灵敏度幅值接近,且方向相反,则两只晶体的总等效加速度灵敏度为

在双晶体加速度灵敏度补偿中,对两只晶体有一定的要求。两只晶体只有一个方向的加速度灵敏度较差需进行补偿,其他两个方向的加速度、灵敏度较低而无需补偿。表贴晶体正好符合这一特性。因此,在双晶体加速度灵敏度补偿的新型抗振晶体振荡器中选用表贴封装晶体作为补偿对象。两只晶体的加速度灵敏度越接近则补偿效果越好。因此,需对每只晶体的加速度灵敏度进行测试与筛选,选择加速度灵敏度较接近的两只晶体进行装配[6-8]。
3 测试结果
振动实验的测量系统框图如图4 所示。振动台控制器接收到振动台上加速度传感器的振动信号,经控制器的信号处理,再将控制信号传至功率放大器,使振动台按照预先设置的振动条件进行振动。振动台振动后使用E5052 信号源分析仪测量晶体振荡器的相位噪声,随机振动条件如图5 所示。

图4 振动实验测量系统框图
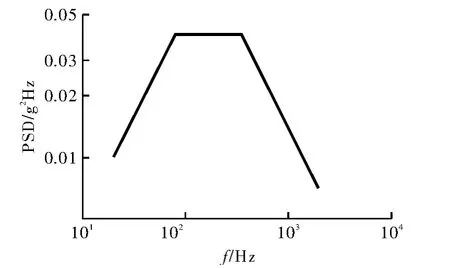
图5 随机振动曲线
晶体振荡器的信号输出频率为10 MHz,使用表贴封装AT 切10 MHz 晶体。图6 和图7 分别为使用单只晶体A 和晶体B 的晶体振荡器在振动状态下的相位噪声曲线。两只晶体振动状态下的相位噪声性能均是Y 方向较差而其他两个方向较好,且两只晶体在Y方向的性能相近,约为-115 dBc/Hz@1 kHz。
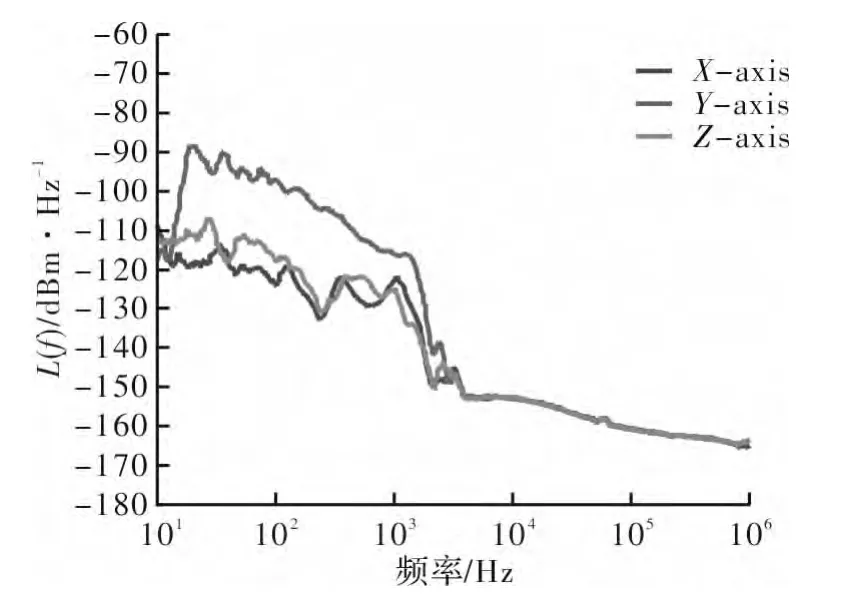
图6 晶体A 振动状态下的相位噪声
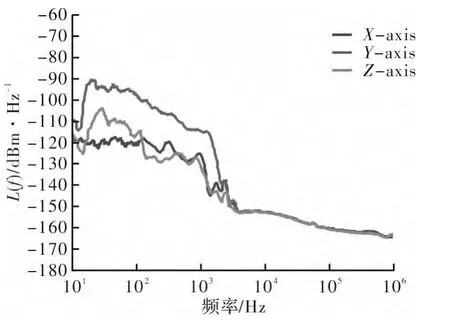
图7 晶体B 振动状态下的相位噪声
通过式(2)和式(3)换算出两只晶体各方向和总加速度灵敏度,分别如图8 和图9 所示。从图中可看出,两只晶体的总加速度灵敏度均主要取决于各自Y方向的加速度灵敏度,约为1×10-9/g。因此两只晶体较接近和匹配。只需对晶体Y 方向的加速度灵敏度进行补偿,则晶体振荡器的总加速度灵敏度指标将明显提高。
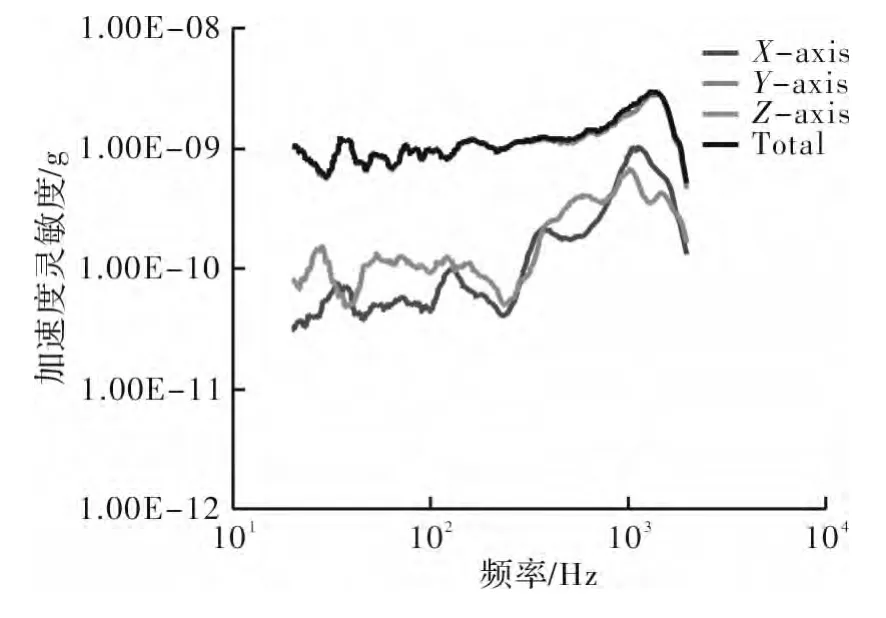
图8 晶体A 各方向和总加速度灵敏度
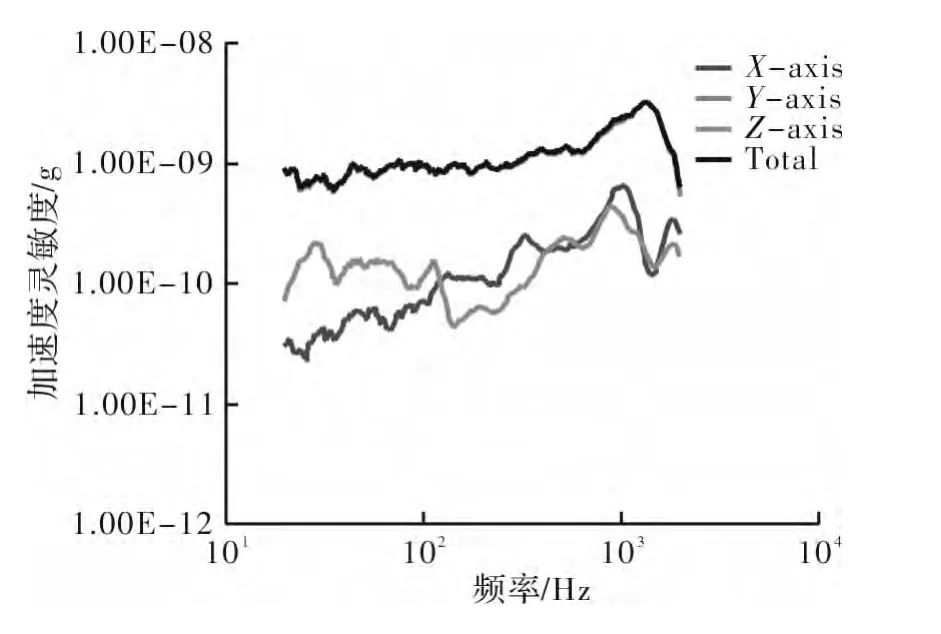
图9 晶体B 各方向和总加速度灵敏度
将选好的两只晶体装配于PCB 电路板中,组成双晶体加速度灵敏度补偿的新型抗振晶体振荡器。晶体A 和晶体B 在电路上串联,并按加速度灵敏度相反的方向进行装配。测试此新型抗振晶体振荡器振动状态下的相位噪声性能,如图10 所示,Y 方向的振动性能明显提高,最差方向约为-140 dBc/Hz@1 kHz,较补偿前改善了20 dB 以上。
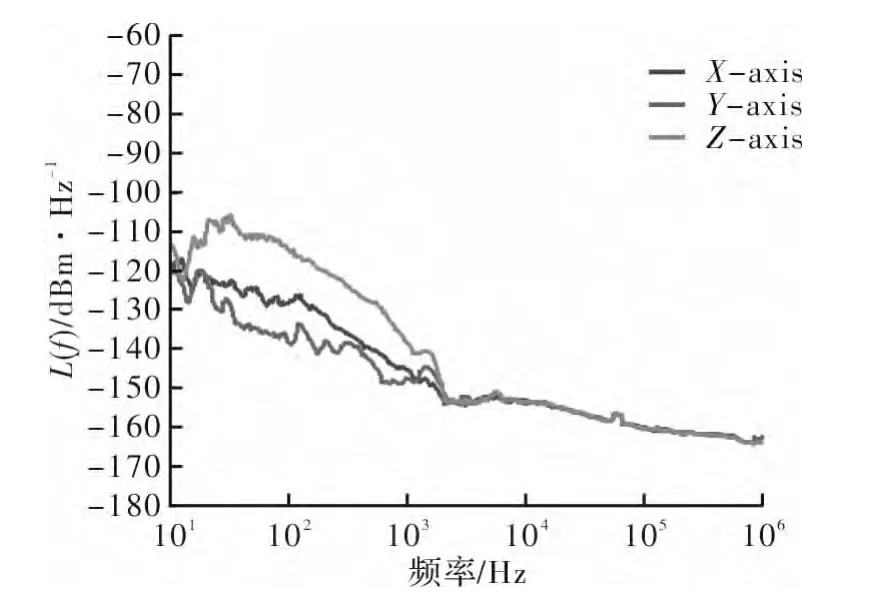
图10 补偿后振动状态下的相位噪声
通过公式可计算出各方向和总加速度灵敏度,如图11 所示,Y 方向的加速度灵敏度达到了10-11/g 量级,而总加速度灵敏度约达到了1×10-10/g,较补偿前提高了10 倍。
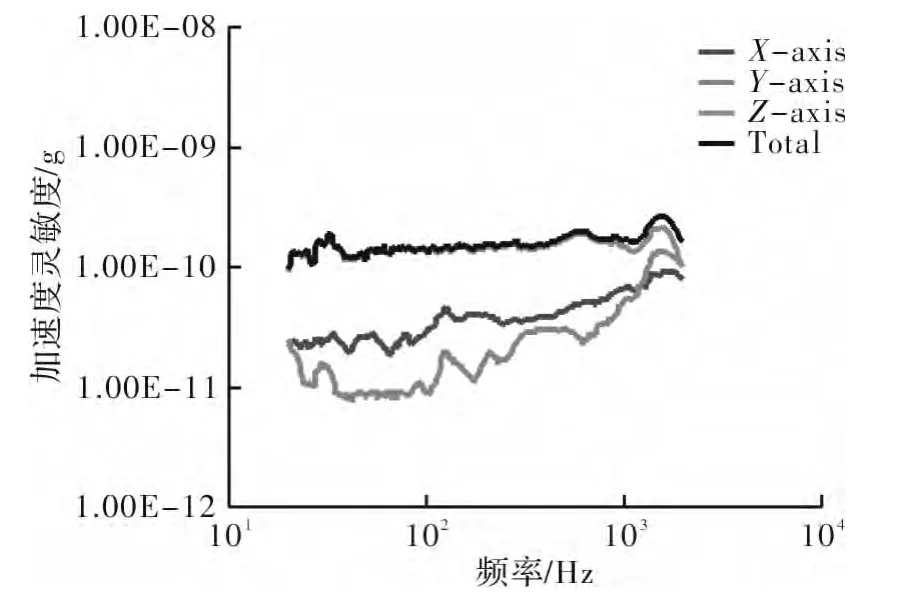
图11 补偿后各方向和总加速度灵敏度
4 结束语
本文提出一种使用双晶体进行加速度灵敏度补偿的新型抗振晶体振荡器的设计方法,并在理论上分析了此方法的可行性和有效性。运用此方法到抗振晶体振荡器的设计中,实验结果显示晶体振荡器的总加速度灵敏度性能提高了10 倍,振动状态下的相位噪声较补偿前改善了20 dB 以上,最差方向达到了约-140 dBc/Hz@1 kHz。该方法对提高晶体振荡器的抗振性能有着重要意义,且体积并不会过多增加。
[1] 苏敏,孙厚军.频率源相位噪声对频率步进雷达系统性能的影响[J].弹箭与制导学报,2005(S4):375-394.
[2] VIG J R.Military applications of high accuracy frequency standards and clocks[J].IEEE Transactions on Ultrasonics,Ferroelectrics and Frequency Control,1993,40(5):522-527.
[3] FILLER R L.The acceleration sensitivity of quartz crystal oscillators:a review[J].IEEE Transactions on Ultrasonics,Ferroelectricsand Frequency Control,1988,35(3):297-305.
[4] MILLIREN B T,MARTINAND D W,EMMONS D A.An acceleration compensated Precision Quartz Oscillators[C].Proceedings of the 42nd Annual Frequency Control Symposium,1988:334-341.
[5] STEVEN J F,GREGORY A.Burnett.Reducing the acceleration sensitivity of AT-strip quartz crystal oscillators[C].IEEE International Frequency Control Symposium,2010:25-30.
[6] 孙敏,黎敏强,陈中平,等.一种宽温高精度温补晶振的研制[J].电子科技,2013,26(8):90-92.
[7] 董自健,乔国垒.一种新型XT 切型晶体温度补偿电路的设计[J].电子科技,2008,21(11):18-19,34.
[8] 向延钊,张涛,张迪.一种带振幅调节的晶体振荡器[J].电子设计工程,2013,21(2):130-133.
猜你喜欢
当代水产(2022年6期)2022-06-29
现代电力(2022年2期)2022-05-23
人工晶体学报(2021年10期)2021-11-26
汽车观察(2018年12期)2018-12-26
制造技术与机床(2018年12期)2018-12-23
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
成都信息工程大学学报(2017年1期)2017-07-21
探测与控制学报(2015年4期)2015-12-15
