
水下应急维修用吊机仿真模拟器设计与实现
2014-03-08 05:47徐宝昌蔡胜清何宁强
自动化与仪表 2014年12期
徐宝昌,蔡胜清,何宁强
(1.中国石油大学(北京)自动化系,北京 102200;2.海洋工程股份有限公司,天津 300450)
海洋石油工业是一种技术密集型行业,而深水下放安装也属于特殊工种作业。由于海洋石油生产对于海上施工作业环境要求极为苛刻,使得海上石油生产面临巨大的威胁。吊机作为海洋石油机械的重要设备,其所处的作业环境决定了其操作的特殊性。吊机含有回转、变幅、收放等操作,对操作人员的时空感以及对操作的精度要求很高。仿真模拟器具有丰富的功能和优良的性能,其环境的仿真可以和实际十分相近,是运行人员提高运行水平的理想现代化培训装置,近年来在国内外得到迅速的发展[1]。
目前,吊机训练仿真器已经在部分领域有所使用。中联重工科技发展股份有限公司开发的塔式起重机仿真培训系统,以工地用吊机为仿真对象[2];交通部水运科学研究所开发的港口起重机操作仿真器,以港口起重机为对象[3]。海洋平台和船舶使用吊机,其工作的环境复杂和操作方法都比上述仿真器复杂。为此本文设计和开发了虚拟环境下的吊机作业培训系统,并对其相关的关键技术进行了研究。
1 吊机仿真模拟器设计
该仿真器所包含的仪器设备与实际的吊机控制台具有相同的操作方法和状态显示,而且还具有操作过程监控,成绩自动评定,模拟故障设定等功能。通过PLC采集操作数据,驱动计算仿真服务器进行模型解算,通过操控仿真服务器显示和保存操作数据及计算仿真服务器反馈的运动参数,最后通过视景仿真机组进行场景渲染[8-9]。通过模块化的结构和良好的人机交互接口,使得仿真模拟器具有良好的实用性和可扩展性[4]。吊机仿真模拟器结构图如图1所示。

图1 吊机仿真模拟器结构图Fig.1 Simulator structure diagram of crane
2 吊机仿真模拟器功能
根据水下应急维修仿真培训系统的设计要求和水下应急维修训练的要求,吊机仿真模拟器应具有如下功能:
(1)场景漫游功能:刚刚进入深水领域的员工对现场的作业环境以及作业工机具等都不熟悉。在培训初期,教练员可以设定场景漫游,供学员了解现场施工的工机具位置以及熟悉施工环境;
(2)操作培训功能:系统提供了逼真的训练环境,如吊机模拟操作台、逼真仿真视景画面。操作员可以自行选择操作训练课题进行训练;
(3)半监督培训功能:教练员通过中央控制台实时监控操作员的训练情况,并可以实时地给予帮助和指导;
(4)考核评分功能:学员经过上述几部分的学习之后,在独立操作的情况下,教练员开启考核评分功能,系统能够自主地对学员操作进行考核评分。
3 吊机仿真器实现
由图1可知,吊机仿真模拟器由吊机仿真操作台、后台服务器组、网络通讯系统、中央控制台等硬件组成。
3.1 吊机仿真操作台
以海洋石油286船用吊机为原型,对吊机仿真操作台进行模拟。在不失原型吊机功能的情况下,对真实的吊机操控室做了一些简化,依据工业标准进行制造和加工,保证了仿真培训过程的真实感和沉浸感,达到仿真培训的效果。吊机仿真操作台主要由操纵控制面板和PLC逻辑控制器[9]组成。吊机仿真操作台如图2所示。
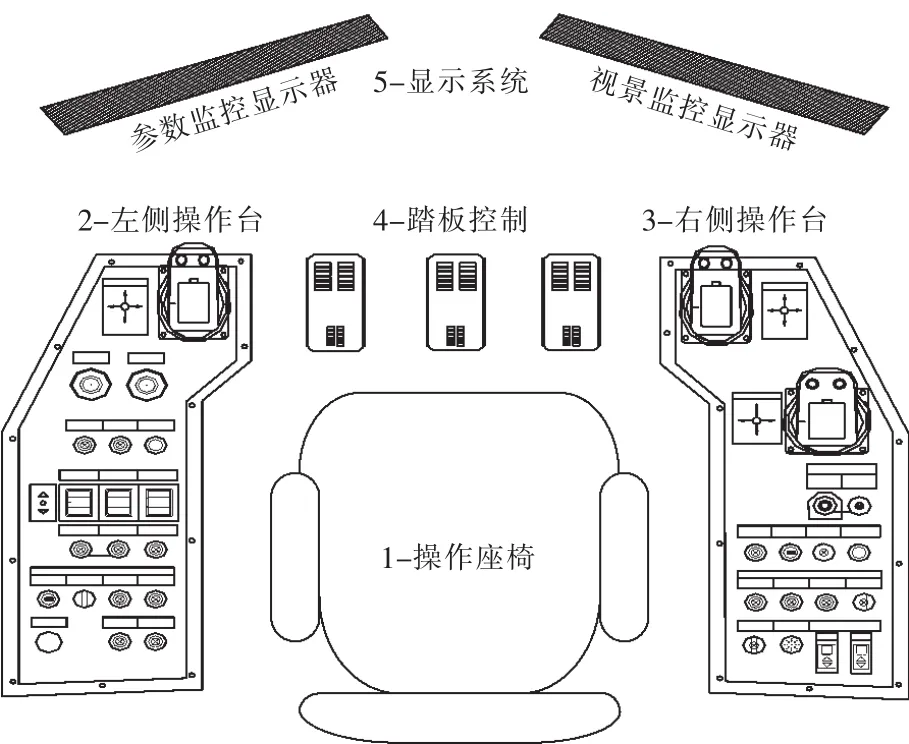
图2 吊机仿真操作台外形图Fig.2 Crane simulator outside drawing
3.1.1 操纵控制面板
操纵控制面板是吊机仿真操作台人机直接接触的部分。操纵控制面板主要包括操作椅、左右侧控制台、踏板控制等部分。左右侧操控台上布置有手柄、按钮、旋钮、指示灯和蜂鸣器等。所有的模拟量信号都是4~20 mA标准电信号,电信号通过采集模块转换为数字信号并通过PLC逻辑控制器进行逻辑预处理进而送至上位机至后台服务器。
3.1.2 PLC逻辑控制器
仿真模拟器硬件核心是PLC逻辑控制器。它不仅是联系系统硬件及软件的桥梁,也是信号采集及仿真器逻辑运算的大脑。对从操纵控制面板发出的信号进行处理,完成联锁逻辑运算,确定需要向操控仿真服务器发出的信号。出现违背逻辑关系的误操作时,将误操作信号分类后向操控仿真服务器发送,并在仿真操作台上发出声光报警。
仿真器共需要24路数字量输入,2路数字量输出,7路模拟量输入。根据系统要求,本仿真器选用西门子 S7-200 CPU226,EM235,EM231 以及 CP243-1等模块,PLC I/O点的配置如表1所示。通过网络通讯系统,使仿真操作台成为网络的一部分,用此种方式通讯便于今后系统的扩展[5]。吊机仿真模拟器PLC系统配置如图3所示。
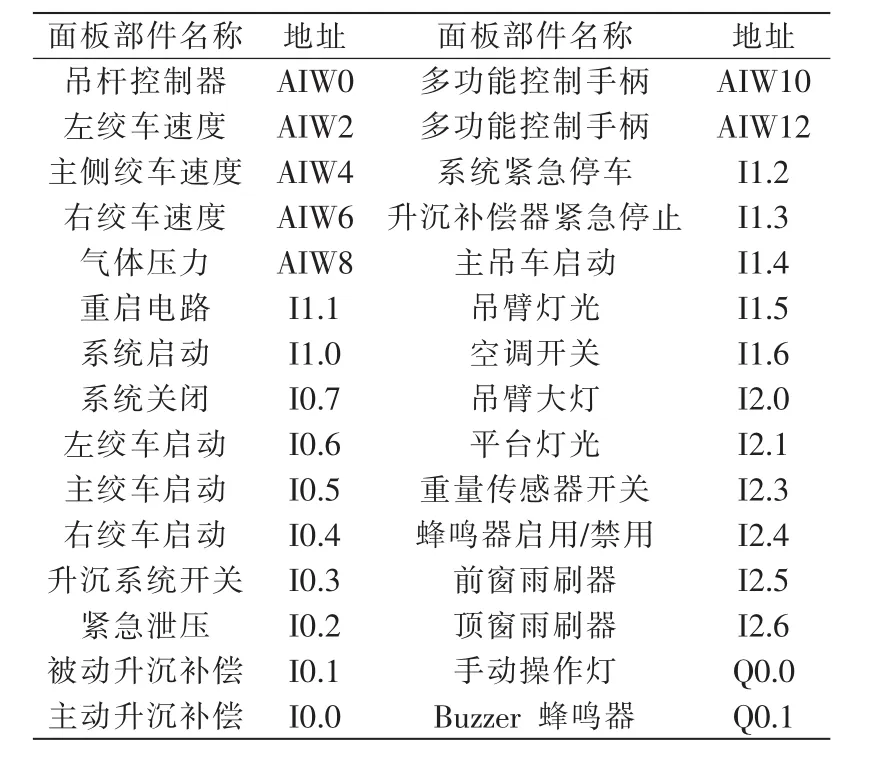
表1 控制系统输入输出点Tab.1 Input and output points of control system
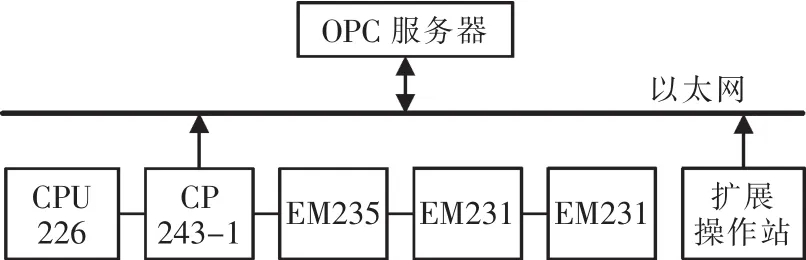
图3 吊机仿真模拟器PLC系统配置Fig.3 PLC system configuration for crane simulator
3.2 后台服务器组
后台服务器组包含操控仿真服务器、计算仿真服务器和视景仿真机组,是仿真模拟器的核心,需要完成大量的数据处理、模型计算、数据实时转发同步等工作。将每一个服务器及其下面所接入的子系统都设定为一个仿真节点,则各个节点都是一个独立仿真的系统。
3.2.1 操控仿真服务器
操控仿真服务器的作用有2个:一是负责对学员操作过程中的动静态数据进行管理。记录操作台输出的操作参数以及计算仿真服务器输出的运动参数。通过这些数据可以实现对学员操作真实回放,为考评系统提供数据依据,并帮助学员纠正操作错误;二是使操作人员更清楚地了解“虚拟设备”当前运行状况,了解当前操作引起设备的回馈或者动作。通过参数以及曲线的变化,操作员可以对当前设备的控制做出实时调整,以满足水下应急维修实时仿真的要求。
本仿真系统中不使用传统的仪器仪表,传统机械仪表在长时间使用后对于数据的输出存在一定的误差,且维修更换较为麻烦。监控参数较多时,采用传统仪表会造成很大的投入。用虚拟仪表代替传统的仪器仪表,不但可以增加设备的可靠性,还可以以较低的代价对系统进行改造升级,减少设备的投入以节约成本[10]。本系统采用西门子WinCC组态软件来显示操作台发出的控制指令和计算仿真工作站回馈的吊机运动参数并将实时数据归档。
3.2.2 计算仿真服务器
计算仿真服务器主要是构建仿真模拟器吊机动力学模型,对外部的数据执行响应,实时进行吊机动力学仿真计算,对相关物体的状态、位置、动作、干涉等进行计算和判断,并将计算出的结果传送给视景仿真机组和操控仿真服务器显示。根据教练员站和操作台的指令,完成指定的模型解算,以驱动场景运行和对学员提供观测数据。计算仿真服务器采用Vortex多体动力学软件建立物理模型并解算[7]。吊机模型解算流程如图4所示。
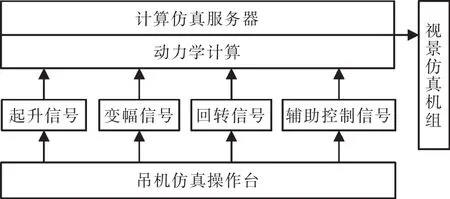
图4 吊机模型解算流程Fig.4 Crane model solution process
3.2.3 视景仿真机组
视景仿真机组将计算仿真服务器传来的位置姿态数据进行场景绘制,并发布到各子场景中,如吊机仿真操作台、中央控制台。视景的渲染和驱动在Vega Prime平台下完成,采用Vega Prime分布式渲染模块实现多通道显示。
3.3 中央控制台
中央控制台包括教练员视景显示、教练员控制显示器、教练员工作站、音响系统及通讯设备等。其中教练员工作站为中央控制台的核心,负责整个系统仿真流程的控制、系统的初始化等工作。教练员工作站主要有系统管理、自然环境配置、科目的设定、仿真系统考核评分等功能。仿真系统管理包括系统网络管理、学员信息录入、教练员信息录入;仿真系统自然环境的配置包括对海流、天气、风速、风向等配置;仿真系统科目设定包括培训科目和考核科目的设定,如水下采油树密封圈更换、水下采油树不停产维修等;仿真系统考核评分功能包括专家知识库设定、操作过程监视、成绩评定、成绩管理、教练员主观评价等。
4 仿真模拟器数据通讯
通讯功能是仿真系统中重要的一个环节,是联系仿真模拟器各个部分的纽带,是仿真系统的血脉。良好的通讯系统会加快仿真的数据传输速率,增强仿真系统的实时性。OPC(OLE for process control)技术是基于微软的OLE、COM和DCOM技术,由一系列用于过程控制和制造业自动化应用领域的标准接口、属性以及方法组成。ActiveX/COM技术定义了工业软件组件如何才能交互作用和共享数据,由于得到了微软Windows技术的支持,OPC为多种多样的程控设备提供了一个公共的接口,而与过程中的控制软件或设备无关[6]。OPC服务器及所有的硬设备均通过以太网连接组成局域网,仿真系统的其它设备通过访问OPC服务器实现了吊机仿真器数据的交互,从而了解吊机的工作状态及操作人员的操作信息。这样就构成了一个资源共享、任务分担的分布式系统。采用OPC通讯协议方便吊机仿真模拟器以后的扩展,可以直接连接其它仿真设备,从而组成协同仿真系统。仿真模拟器OPC通讯原理图如图5所示。
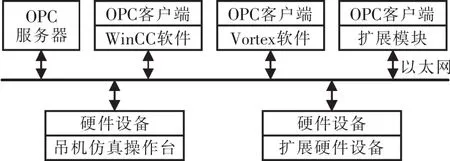
图5 仿真模拟器OPC通讯原理图Fig.5 OPC principle diagram for simulator
在本仿真模拟器中,与硬件相配套的使用西门子S7-200专用PC Access OPC服务器。
5 典型案例的仿真培训过程
水下应急维修进行仿真培训的操作台,不但可以使学员熟悉吊机的操作、船舶或平台上的工机具位置以及作业环境,还可以使学员对水下应急维修的整体流程更加熟悉。以水下采油树密封圈更换过程中连接器下放安装过程为例,描述吊机操作流程如图6所示。其中,CI指连接器安装工具,AHC指升沉补偿装置,ROV指水下机器人。
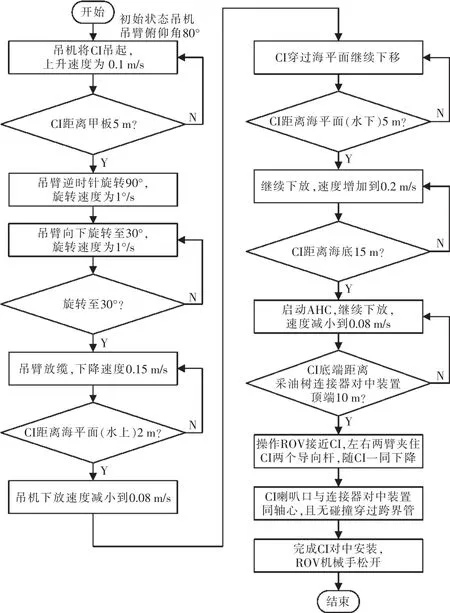
图6 连接器下放安装的吊机操作流程Fig.6 Crane operation process for lowering and installation of CI
6 结语
本系统可以完全仿真海上平台中吊机操作的所有动作,进行吊机的操作训练,环境适应性训练。对操作员深水水下应急维修的过程进行培训,对危险工况的操作进行预演。当突发情况来临时操作人员能够从容应对。利用仿真培训装置加强新上岗员工培训或者在职员工再培训,是安全生产的保证,增强员工对危机意识的判断力,同时也降低了培训的成本,提高了效率和质量。
[1] ZHENG Xiu yu,QIAN Yu,WANG Ke feng,et al.Key techniques for the development of a simulation platform for chemical process systems[J].Journal of South China University of Technology(Natural Science Edition),2000,28(3):59-65.
[2] 崔壮平,陈刚,习可,等.超现实感的塔式起重机虚拟培训系统开发[J].建设机械技术与管理,2014(4):113-115.
[3] 刘晋川,程新风,胡思唐,等.港口起重机操作模拟器[J].港口装卸,2004(4):1-4.
[4] 徐宝昌,宋永杰.燃气轮机—压缩机组仿真平台开发[J].计算机与应用化学,2012,29(11):11-15.
[5] 郑巧,胡卫东.绞车模拟操作台设计[J].石油机械,2010,38(7):41-43.
[6] 周新民,涂铮.基于OPC技术的PC与S7-200 PLC的实时通信[J].武汉理工大学学报,2008,32(2):355-358.
[7] 魏春雨,周晓军,魏燕定,等.基于Vortex的6自由度平台洗出运动仿真[J].浙江大学学报:工学版,2012,46(8):51-57.
[8] Juang J R,Hung W H,Kang S C.A crane simulator with kinesthetic and stereoscopic vision[J].Advanced Engineering Informatics,2013(27):506-518.
[9] Mitsunori Yoneda,Funiihito Arai,Toshio Fukuda.Operational assistance system for crane using interactive adaptation interface-design of 3D virtual crane simulator for operation training[J].IEEE International Workshop on Robot and Human Communication,1997:224-229.
[10]潘露伟,戴革林,聂林.虚拟仪表技术在空空导弹测试设备中的应用[J].自动化与仪器仪表,2011(4):97-99. ■
猜你喜欢
沈阳大学学报(自然科学版)(2021年5期)2021-10-15
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
天津科技(2021年2期)2021-03-09
中国计算机报(2020年9期)2020-03-25
计算机测量与控制(2018年7期)2018-07-27
铁路计算机应用(2018年4期)2018-05-03
中国公路(2017年19期)2018-01-23
智能制造(2015年10期)2015-11-04
舰船科学技术(2015年8期)2015-02-27
汽车文摘(2014年9期)2014-12-13
