模糊神经PID在空分液位控制中的应用
2014-03-08 03:47:52宋星星
自动化与仪表 2014年9期
宋星星
(南京工业大学 电子与信息工程学院,南京 211816)
空分装置主要是为气化装置提供生产所需的中压高纯度氧气,同时为生产装置提供密封、吹扫所需的氮气。它的主要步骤为:空气在空冷塔遇冷,分子筛净化,精馏塔分馏,最后氮气氧气出冷箱。整个过程常见的问题就是液位问题[1]。空气进入空冷塔遇冷涉及液位问题,空冷塔中的水位要保持在一定范围内,否则会影响后面步骤的准确实施。
液位调节存在非线性和时变性,传统的PID调节器关键在于比例、积分和微分系数的选取,整定这些参数会遇到很多问题,因此传统PID控制对复杂控制系统运用效果不是很理想。对于液位控制,当系统参数变化或工作条件变化时,传统PID控制很难得到理想效果。而运用模糊神经智能控制系统,模糊控制具有鲁棒性强和对参数变化不敏感等特点,但控制规则是由设计者和操作人员的经验获得,受设计者或操作人员经验的局限性。而神经系统具有学习能力和预测自适应能力,通过训练及时调整控制规则,两者结合不仅克服了常规PID控制的不足,而且达到了很好的控制效果,从而大大提高了产品产量。针对空分装置特点,使用了模糊神经控制,该系统具有自学习和自适应能力,并且在扰动环境下,具有良好的鲁棒性,可满足控制要求。
1 空冷塔液位模糊神经控制系统的结构
原料空气经过滤后再通过空压机压缩,从左方进入空气冷却塔进行遇冷,冷却水从空冷塔的右方分段进入空冷塔,空气自上而下经过空气冷却塔,在冷却的同时也被清洗。该系统的液位一般维持在1000 mm左右,在此空冷塔内部的下方有一个液位传感器,液位传感器上引出的线接到PLC的模拟输入点上,在PLC上可以读到液位值,调节阀101与传感器相连,通过调节阀101的开度,以调节出水流量的大小,当液位计测出实际液位高于设定值时,自调阀101的阀门开大,反之就开小,在空气流入量基本保持不变的情况下,调节出水量来保证空冷塔的液位维持在恒定的值。空冷塔液位控制方案如图1所示,模糊神经系统框图如图2所示。
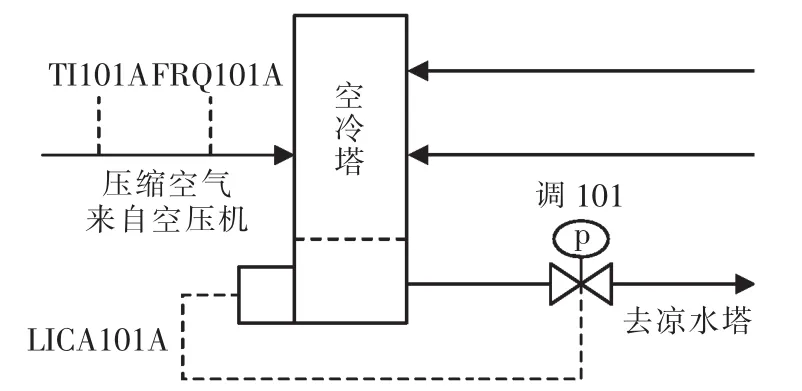
图1 空冷塔液位控制图Fig.1 Chart of cooling tower level control
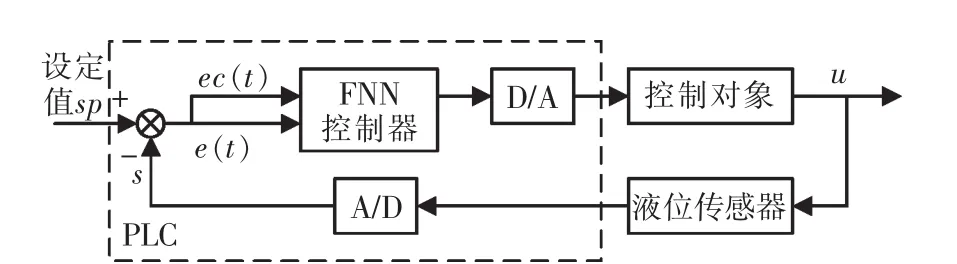
图2 液位调节系统结构图Fig.2 Structure of level adjustment system
2 模糊神经控制器的设计实现
把液位偏差 e(t)=s-sp 和液位偏差变化率 ec(t)=作为输入量,调节阀开度作为输出信号u,通过神经网络模糊推理机的知识和推理模型相对应,构造模糊控制规则的知识结构[2],把液位偏差e对应的x1和液位偏差变化率ec对应的x2按照
如果x1=并且x2=那么输出


{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}
e和 ec将在正负方向变化,所以论域[-6,6]被分成7种语言变量值
[负大,负中,负小,零,正小,正中,正大]
用符号表示为
[NB,NM,NS,ZO,PS,PM,PB]
基于以前的经验知识和重复的实验,设定模糊控制规则表。其实现过程是在Matlab命令窗口中输入Fuzzy然后按回车键进入模糊规则的组建,规则表如表1所示。
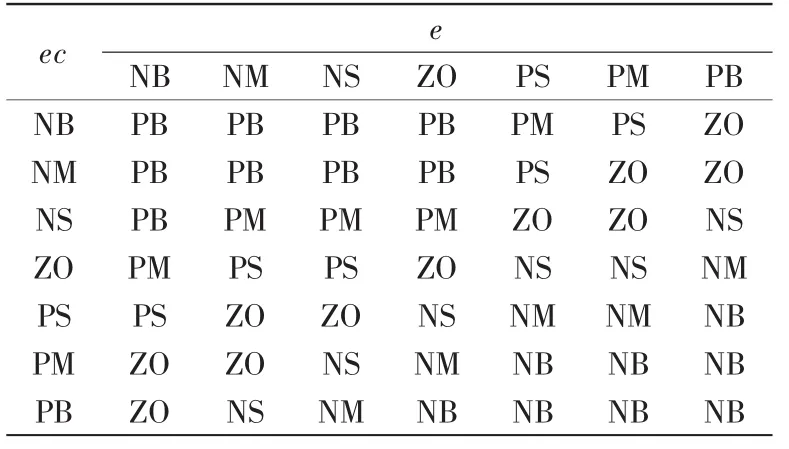
表1 模糊控制规则表Tab.1 Rule table of fuzzy control
模糊神经网络的结构如图3所示。
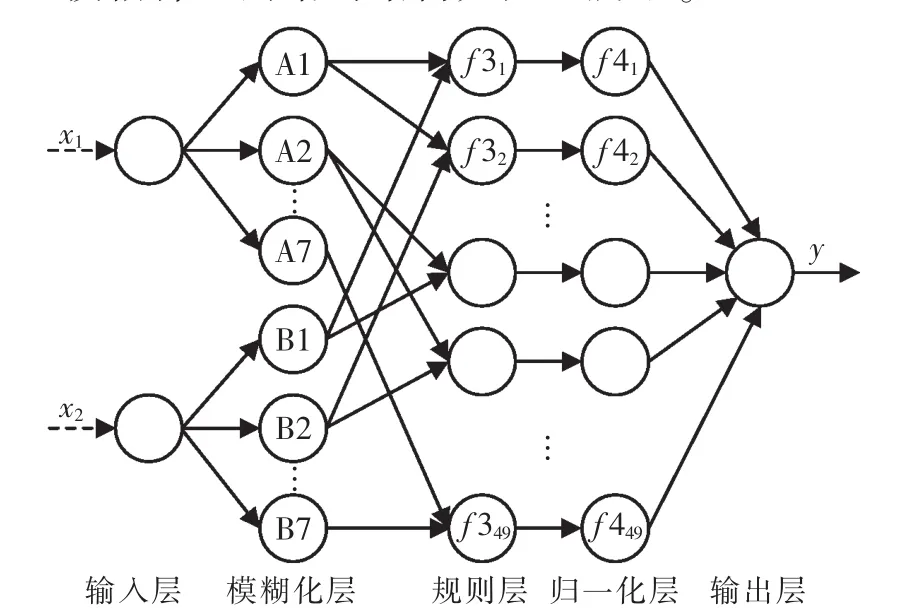
图3 模糊神经网络结构Fig.3 Fuzzy neural network structure
第1层为输入层,液位偏差e和液位偏差变化率ec对应2个输入。
第2层为语言变量层,计算输入变量的隶属度。隶属函数采用高斯函数。

其中:ci,j为函数的中心值,ci,j的值取决于模糊子集的划分;δi,j为函数的宽度值。 式中 i=1,2; j=0~6。
第3层为规则层,计算出每条规则的适用度。该层对应的规则数为49条。

i=1~49;d=1~7;m=1~7; f(1,d)和 f(2,m)表示第2层的输入层。
第4层为归一化层,节点数与第3层相同,实现归一化计算。即
第5层为输出层,实现计算的归一化。

其中,wk为神经元的权值。
3 模糊神经控制器的学习算法
模糊神经控制器的学习目的是修正网络中的权系数wk以及对高斯函数的中心值 ci,j和宽度 δi,j进行参数调节的过程。
为了寻找参数 wk,ci,j,δi,j使得实际输出与期望输出的误差最小,这里采用梯度算法[3]表示

采用 Delta 规则计算 Δwi,Δci,j和 Δ δi,j。
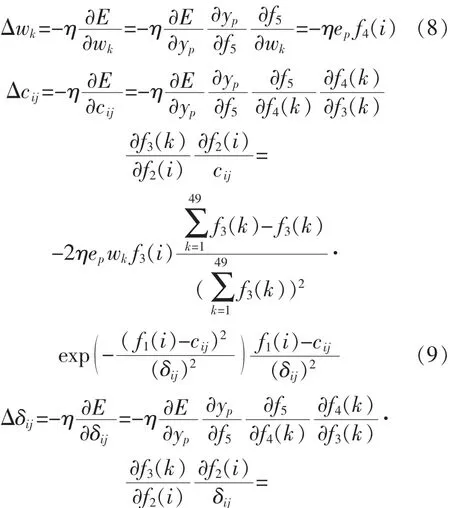
更新之后的各个参数为

4 系统仿真
液位控制系统在石化企业中是被广泛应用的一种被控对象,为典型的一阶惯性纯延时系统,传递函数模型可近似为[4]

其中:采样时间为0.25 s;延时时间为4个采样时间,即τ=1;时间常数T=6.7;比例系数k=0.39。 空冷塔的液位设定值为1 m,采用S_function的M语言[5]进行Sinulink仿真PID和模糊神经PID的控制效果如图4所示。

图4 普通PID和模糊神经PID仿真图Fig.4 Normal PID and fuzzy neural PID simulation
由图4可知,模糊神经PID控制上升时间tr为161 s,延迟时间 td为 60 s,峰值时间 tp为 188 s,调节时间ts为234 s,超调量为1.02%;传统PID控制上升时间 tr为 180 s,延迟时间 td为77 s,峰值时间 tp为 240 s,调节时间 ts为 387 s,超调量为 4.82%;由系统的调节时间ts和峰值时间tp的对比可知,模糊神经PID控制较传统PID控制具有更短的控制时间,由td和上升时间tr可知,模糊神经PID控制具有更快的响应速度,由超调量可知,模糊神经PID控制具有更好的稳定性。因此,与传统PID控制相比较,模糊神经PID对空冷塔液位进行控制具有更好的响应速度、控制时间和稳定性。具体的控制指标参数如表2所示。
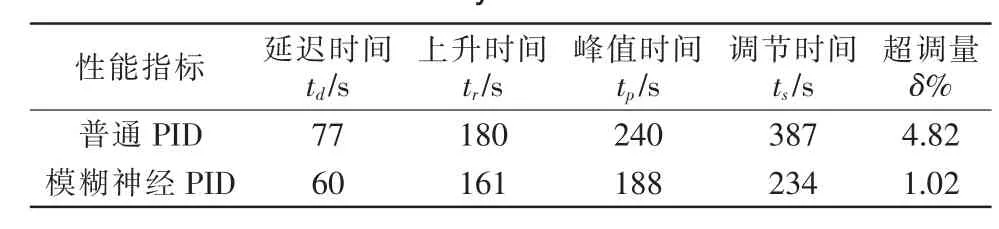
表2 普通PID和模糊神经PID性能指标Tab.2 Performance indicators of normal PID and fuzzy neural PID
在实际生产中生产周期是一个重要指标,超调量模糊神经控制相比于普通PID明显变小,调节时间也大大减短。投入实际生产后,减少了成本。空分装置是整个石化企业生产的关键,因此控制的改进将大大提高该企业的经济效益。
5 实时监测画面
空冷塔液位控制系统由上位机和下位机控制器2部分组成,下位机用西门子的S7-400完成现场采点及主要逻辑编程,上位机用监控组态软件Intouch对现场数据的监控。Intouch利用Wonderware I/O Server的驱动程序,通过以太网卡与下位机S7-400进行数据通讯,包括数据采集和发送数据指令。通过这种方式建立了一个完整的组态软件和通讯程序通讯系统,以便对现场数据进行实时了解,确保系统的高效运行。
将模糊神经控制运用到此控制中的效果图如图5所示。

图5 液位控制实际生产效果图Fig.5 Actual production renderings of level control
图5 为预冷系统的监控画面,模糊神经PID回路控制LICA101B来控制空冷塔的液位,主要记录了液位的设定值SP,实际液位值PV,和101阀的开度MV,当SP值增大时,调节阀的开度会自动减小。在运用模糊神经PID控制后与之前普通PID在相隔相同时间产品氧氮的产量相对比后,有了明显的提高,流量累计是指在一段时间内流量的累积量,如表3所示。
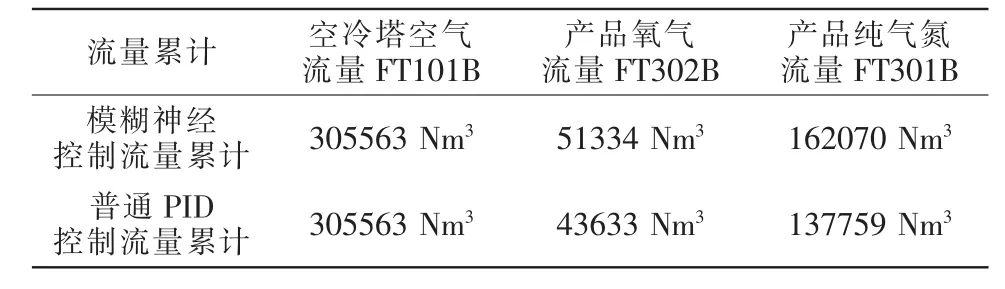
表3 普通PID和模糊神经PID产品流量累计Tab.3 Cumulative product flow of normal PID and fuzzy neural PID
6 结语
本文分析了空分装置非线性、大时滞和时变性等特点,针对以上特点,设计了控制方案,并使用了模糊神经网络PID控制。通过Simulink进行仿真,仿真结果证明,与传统PID控制相比较,模糊神经PID对空冷塔液位进行控制具有更好的响应速度、控制时间和稳定性。在理论分析的基础上,将模糊神经网络PID控制应用到图5的LICA101B PID控制回路中,结果表明,使用模糊神经网络PID后,空分装置明显提高了效率,增加了产量,为企业提高了一定的经济效益。
[1] 张备.空冷塔液位控制的优化[J].化工自动化及仪表,2012,39(6):807-809.
[2] 王艳红.模糊控制在油脂工业液位自动调节系统中的应用[J].河南工业大学学报:自然科学版,2006,27(4):73-75.
[3] 韩春宇,王涛,鲍成磊.模糊神经系统的设计与应用研究[J].辽宁工业大学学报:自然科学版,2013,33(5):347-350.
[4] 罗庚兴.基于PLC和Wincc的水箱液位模糊控制研究与应用[J].工业仪表与自动化装置,2011(5):77-81.
[5] 周品.MATLAB神经网络设计与应用[M].北京:清华大学出版社,2013:337-350.
猜你喜欢
广州化工(2020年9期)2020-05-31 11:04:10
上海化工(2019年5期)2019-06-03 09:39:06
山东化工(2019年4期)2019-02-16 04:04:09
中小企业管理与科技(2018年2期)2018-11-06 11:37:04
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38
河南科技(2014年14期)2014-02-27 14:11:58
河南科技(2014年12期)2014-02-27 14:10:35