MEMS陀螺仪CRM100的信号调理电路设计
2014-03-08 03:47:58胡陈君景增增石玺文
自动化与仪表 2014年9期
胡陈君 ,李 杰 ,2,景增增 ,石玺文
(1.中北大学 电子测试技术国防科技重点实验室,太原 030051;2.中北大学 仪器科学与动态测试教育部重点实验室,太原 030051)
MEMS陀螺仪是微惯性测量组合的主要部件,其性能的好坏直接影响惯性测量的精度[1-2]。因此,准确评价其性能精度,对陀螺仪测量误差分析和标定,已成为使用过程的重要环节[3-4]。CRM100陀螺仪是SILICON SENSING公司生产的一种新型的高精度角速率陀螺仪,既可以输出与角速率呈线性关系的模拟量,也可以通过SPI协议直接输出数字量[5]。
本文在分析CRM100信号输出特点的基础上,设计了模拟信号和数字信号的调理电路,并组装系统实物样机,为进一步分析陀螺误差源,确定误差的随机散布规律,考核性能指标做准备。最后,通过三轴位置速率摇摆温控转台对MEMS陀螺仪CRM100的信号调理电路进行试验验证,标定陀螺仪参数,建立角速率模型方程,对规律性误差给予补偿,提高了陀螺仪的实际使用精度。
1 CRM100陀螺仪
CRM100是PinPoint高精度单轴陀螺仪,采用第5代VSG陀螺技术,具有低功耗、体积小、输出稳定等特点,尺寸为 5.7 mm×4.8 mm×1.2 mm,零位稳定性为24°/h,角度随机游走为 0.28°/h,采用 3.3 V供电,功耗为4 mA[5]。
为了方便用户安装,陀螺仪采用陶瓷LCC贴片式,抗冲击和振动,适应于恶劣环境,易于集成,能够广泛应用于惯性测量和惯性导航系统中。
2 模拟信号调理电路
CRM100陀螺仪工作在模拟信号输出模式下时, 具备 75°/s、150°/s、300°/s和 900°/s 4 个可选择的动态测量范围,同时还可以依据实际需要调节带宽。模拟信号调理电路原理图如图1所示。
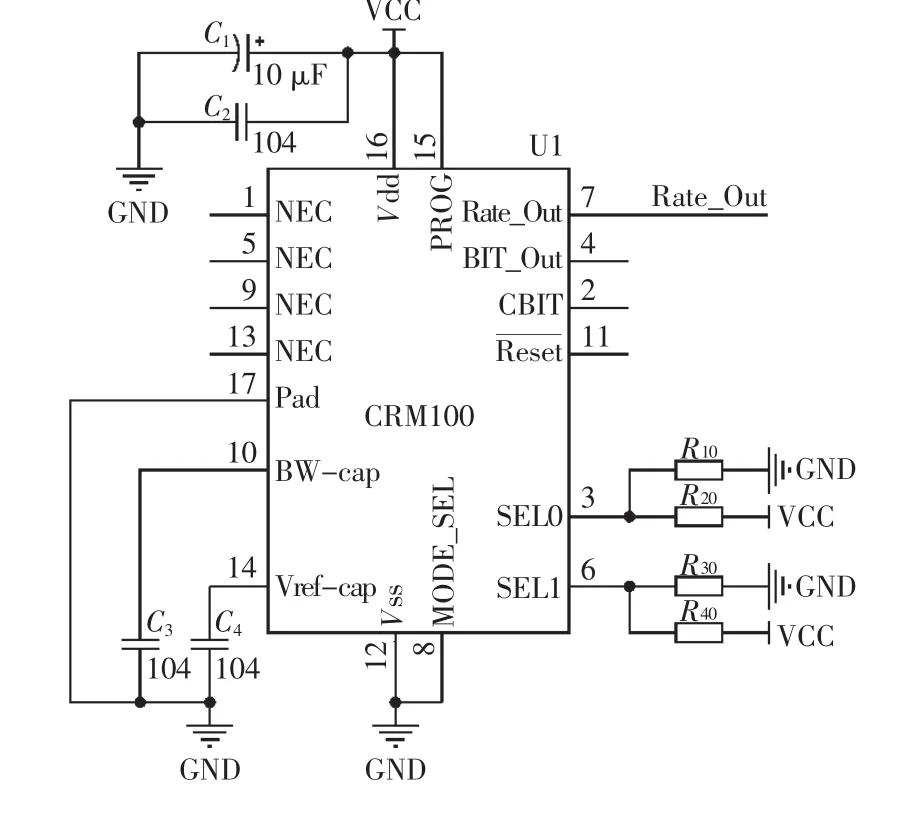
图1 模拟信号调理电路原理Fig.1 Analog signal conditioning circuit schematic diagram
通过控制CRM100陀螺仪的MODE_SEL的输入调节信号输出方式,当MODE_SEL与GND相连接时,陀螺仪输出模拟量。陀螺仪的动态测量范围可以通过输入组合方式调节,为了方便实际工程应用,使设计的调理电路具有通用性,本文设计了图1的连接方式,将SEL0分别经电阻连接到GND和VCC,当 R1为 0 Ω 电阻,R2电阻无穷大时,相对于SEL0的输入为GND,当R1电阻为无穷大,R2为0 Ω电阻时,相对于SEL0的输入为VCC,SEL1的控制方式类似。 本设计通过改变 R1、R2、R3、R4电阻的阻值和焊接方式,能够很方便地对动态测量范围进行调节。具体调节方式如表1所示。

表1 模拟输出模式下测量范围的调节Tab.1 Measurement range adjusting for analog output mode
在调节陀螺仪的动态测量范围时,切记不能令R1=R2=0 Ω或R3=R4=0 Ω,否则将导致陀螺仪供电出现问题,烧坏器件,造成不可恢复的损害。
在实际应用中,还需调节传感器的带宽,本设计提出了一种简便易行的调节方式,通过改变电容C3的容值,来调节带宽,使信号调理电路能应用于不同的带宽要求场合。C3的不同容值所对应的典型带宽如表2所示。
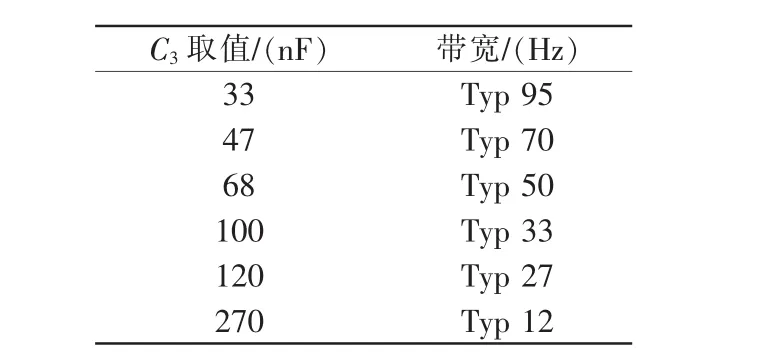
表2 C3的不同容值所对应的带宽Tab.2 Corresponding bandwidth based on different C3values
模拟信号具有输出连续性,实时反映陀螺仪的角速率信息,动态测量范围可调,信号宽度可控的优点,但信号传输易受干扰,且后续的实际应用中需要高精度的A/D转换器对模拟信号进行采样、量化,转换为数字量,才能进一步参与解算和使用,增加了电路的复杂性[6-8]。
3 数字信号调理电路
当CRM100陀螺仪的 MODE_SEL与 VCC(3.3 V)相连接时,陀螺仪工作在数字信号输出模式。调理电路设计原理图如图2所示。
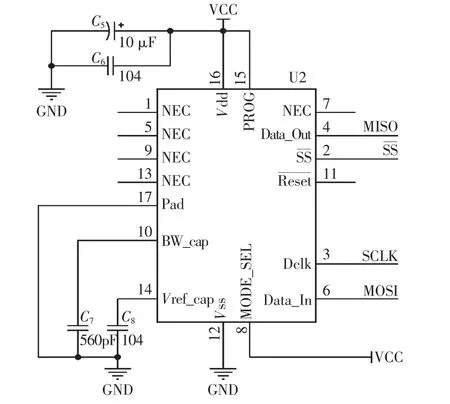
图2 数字信号调理电路原理图Fig.2 Digital signal conditioning circuit schematic diagram
当陀螺仪工作在数字模式时,通过SPI串行通信口输出数字信号。本文设计数据采集系统通过模拟SPI口与陀螺仪进行信息交换。陀螺仪的SPI通信时序如图3所示。
SPI(serial peripheral interface)总线是由Motorola公司开发的全双工同步串行外设接口,用于CPU与各种外围设备进行全双工、同步串行通信[9-10]。一般而言,SPI总线接口主要用于主从分布式的通信网络,由一个主设备和一个或多个从设备组成,主设备通过从机选通信号启动一个与从设备的同步通信,只需SCLK(主机输出串行时钟信号)、SS(从机选通信号)、MISO (主机输入从机输出信号)、MOSI(主机输出从机输入信号)4根I/O接口线即可实现发送和接收数据,完成微控制器与各种外围设备之间的通信[11-12]。
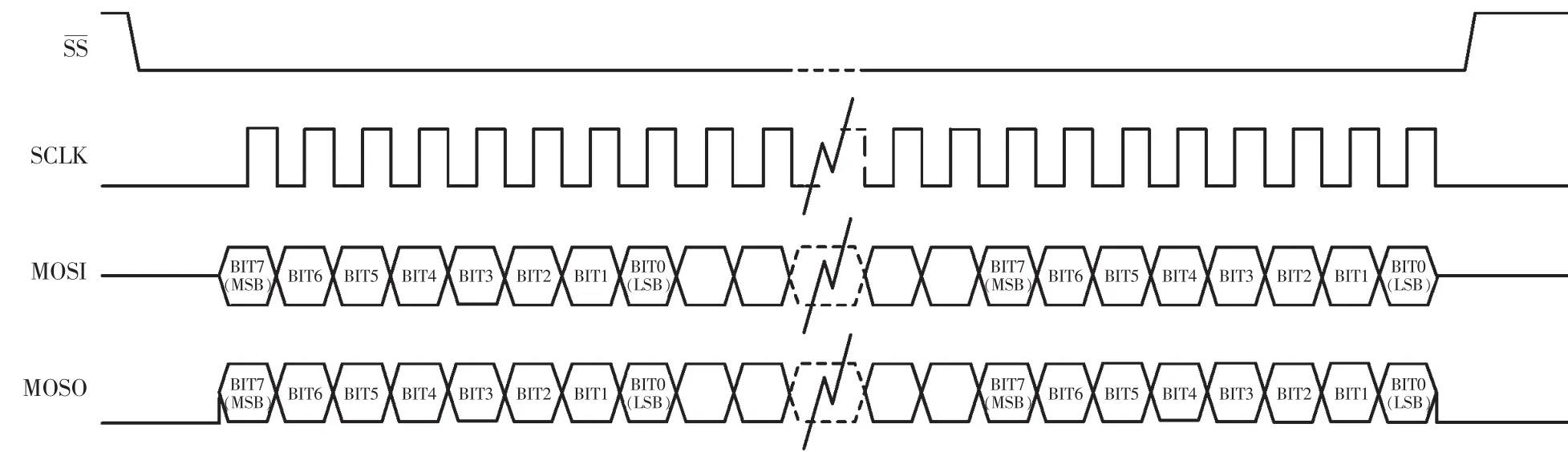
图3 CRM100陀螺仪的SPI通信时序Fig.3 SPI communication timing of the CRM100 gyroscope
本设计中,SPI工作在主从模式下,数据采集系统充当主机,陀螺仪充当从机[13]。陀螺仪的SS(第2管脚)为从机片选接口,当置为低电平时,选通从机CRM100陀螺仪;Dclk(第3管脚)为串行时钟信号SCLK接口,该时钟信号由数据采集系统产生,再输入到陀螺仪中,控制二者信息交换速率;陀螺仪的 Data_In(第6管脚)作为MOSI接口,接收数据采集系统发送的命令;Data_Out(第4管脚)作为MISO接口,将陀螺角速率信息传输到信息采集系统。
4 试验验证
根据CRM100陀螺仪的输出方式的不同,设计2种对应的信号调理电路,并组装样机,实时存储陀螺的角速率信息,为事后试验数据的分析做准备。为验证所设计系统的可靠性和正确性,利用实验室三轴位置速率摇摆温控转台和相关采集电路对陀螺仪进行测试。测试过程中,将陀螺仪安装在转台平面上,并使陀螺仪的敏感轴与转台的转轴保持平行,则转台角速率即为陀螺敏感到的角速率。
4.1 模拟输出方式
当CRM100陀螺仪以模拟量输出时,对于模拟信号调理电路,R1处焊接0 Ω的电阻,R2不焊接,相当于SEL0接GND;R3不焊接,R4处焊接0 Ω的电阻,相当于SEL1接GND,此时,陀螺仪的动态测量范围为±150°/s。BW_cap引脚处电容C3选用100 nF,将陀螺的带宽设定为33 Hz。本实验以该测量范围和带宽为例,验证模拟信号调理电路的正确性和可靠性。设定转台的转速分别为±150°/s、±130°/s、±120°/s、±100°/s、±80°/s、±60°/s、±40°/s、±20°/s、±10°/s、±6°/s、±3°/s、0°/s,启动转台,利用相应的模拟数据采集系统实时采集存储陀螺的角速率信息。
利用MATLAB处理试验数据,得到CRM100陀螺仪模拟输出电压值与输入角速率之间的关系如图4所示。
图中,X轴表示陀螺输入的角速率,Y轴表示陀螺模拟输出与角速率呈一定关系的电压值。从图中可以看出,陀螺输出电压值与输入角速率之间呈线性关系,利用最小二乘法对数据进行分析可知,当陀螺的测量范围为±150°/s时,对应的标度因数为0.006615 V((°)s-1),零点为 1.652118 V。
4.2 数字输出方式
当CRM100陀螺仪以数字量输出时,陀螺仪信号调理电路与数字数据采集电路板之间通过SPI串行通信接口进行通信。通过主机发送命令,设置陀螺的动态测量范围为±150°/s,带宽为33 Hz。将陀螺仪安装在三轴角速率转台上,安装方式和转台的转速设定情况与模拟输出方式下试验时保持一致,启动转台,利用相应的数字数据采集电路实时采集陀螺仪的输出。对试验数据进行分析,得到陀螺输出角速率与输入角速率之间的关系如图5所示。
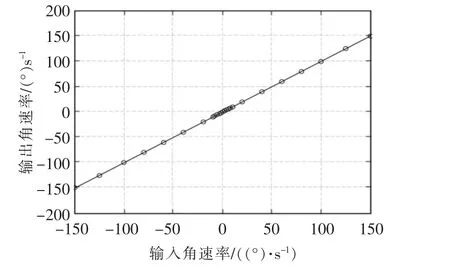
图5 CRM100陀螺仪数字输出标定结果Fig.5 Digital output calibration results of CRM100 gyroscope
图中,X轴表示陀螺的输入角速率,Y轴表示陀螺的输出角速率。进一步可以求得陀螺在该试验模式下标度因数为1.002829,零点为0.233622°/s。
通过上述试验可以看出,陀螺在不同的转速环境中,模拟输出信号调理电路和数字输出信号调理电路均能有效地输出角速率信息,数据输出稳定、正确。
5 结语
本文设计的模拟、数字2种信号调理电路,实现了CRM100陀螺仪实时数据的有效、稳定输出。通过试验论证,结果表明调理电路设计可靠、实用、实时性好,为后续对该型陀螺仪的测试、标校、应用奠定了基础,具有广泛的应用价值。
[1] 刘俊,石云波,李杰.微惯性技术[M].北京:电子工业出版社,2005.
[2] Jie LI,Jun LIU.制导弹药用微惯性测量单元结构设计[J].兵工学报,2013,34(6):711-717.
[3] 杨金显,袁赣南,徐良臣.微机械陀螺测试与标定技术研究[J].传感技术学报,2006,19(5):2264-2267.
[4] 陈旭光,杨平,陈意.MEMS陀螺仪零位误差分析与处理[J].传感技术学报,2012,25(5):628-632.
[5] CRM100 Technical Datasheet[Z].SS2011.http://www.pinpoint-gyro.com.
[6] 齐红涛,苏涛.基于FPGA的高速AD采样设计[J].航空兵器,2010(1):35-39.
[7] 张云福,吕梦琴,罗亮,等.电容式微机械陀螺仪信号检测电路[J].传感技术学报,2013,26(6):878-882.
[8] 莫冰,谭晓昀,刘晓为.电容检测型微机械陀螺的信号检测电路[J].仪器仪表学报,2008(z2):324-326.
[9] 田晓春,李杰,范玉宝,等.基于FPGA的MEMS陀螺仪SAR150实时数据采集系统设计[J].计算机测量与控制,2012,20(11):3107-3109.
[10]陈国华,王刚.基于ADIS16255 MEMS芯片陀螺仪的应用研究[J].中国惯性技术学报,2008,16(4):480-483.
[11]Zhou B,Li D,Lu G.Design of high-speed and reusable SPI IP core based on Wishbone interface[C]//Electrical and Control Engineering(ICECE),2011 International Conference on,2011.
[12]Liu T,Wang Y.IP design of universal multiple devices SPI interface[C]//Anti-Counterfeiting,Security and Identification(ASID),2011 IEEE InternationalConferenceon.IEEE,2011:169-172.
[13]翟瑞永,张文栋,周兆英,等.SPI串行Data Flash在MEMS姿态测量系统中的应用[J].电子技术应用,2013,39(8):37-39.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
电子制作(2019年7期)2019-04-25 13:18:00
电子测试(2018年14期)2018-09-26 06:04:08
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
进出口经理人(2017年9期)2017-09-22 09:15:08
电子制作(2017年24期)2017-02-02 07:14:19
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
兵器装备工程学报(2016年5期)2016-06-15 09:58:46
动力工程学报(2016年3期)2016-04-19 02:01:34