
光刻机E-Pin升降机构的控制系统设计
2014-03-08 06:41徐加彦陈兴林范文超张广莹
自动化与仪表 2014年7期
徐加彦,陈兴林,范文超,张广莹
(哈尔滨工业大学 航天学院,哈尔滨 150001)
集成电路的不断发展对科技和生活产生了日新月异的影响。根据摩尔定律,每18个月,集成电路的晶体管数量增加1倍,性能也提高1倍,但是价格保持不变。在集成电路集成度不断提高的过程中,集成电路的制造技术起到了不可替代的作用。光刻机是集成电路的制造装备,它将设计好的电路版图转移到硅片上形成集成电路,是集成电路发展的关键所在[1]。光刻机E-Pin升降机构作为光刻机的一部分,其作用是吸附硅片做上下往复运动,是光刻技术硅片定位的重要部分。本文设计的光刻机E-Pin升降机构的控制系统是利用IR2130芯片设计功率放大电路来控制H桥,从而驱动音圈电机执行机构。LVDT位移传感器获取模拟信号,通过AD将模拟信号转变成数字信号,利用FPGA具有可编程灵活性的特点,在FPGA里编程设计电路定义通信传输协议,并采用RS485串口将数字信号传输到DSP,提高了信号采集的准确性、稳定性,保证了整个控制系统的精度。DSP2812内部集成了电机控制的许多外设模块,同时集成了Flash存储器和随机存储器RAM,适合运动控制场合。所以在本控制系统中DSP2812作为核心控制器,用于控制算法的实现,满足整个控制系统的快速性、准确性的要求。该光刻机E-Pin升降机构控制系统在国家重大专项02专项子项目“双工件台系统样机的研发”的应用实验中,准确性、快速性、稳定性达到设计要求。
1 控制系统总体方案
如图1所示,整个系统由运动控制模块、传感器模块、执行机构、驱动电路、接口电路模块组成。

图1 总体设计方案框图Fig.1 Overall design diagram
运动控制模块 采用DSP2812作为核心控制器;通过SCI中断不断实时更新采集的传感器高度,将传感器采集的高度信号进行数字滤波后,计算传感器的高度;在中断子程序中通过控制算法对执行机构进行控制。
传感器模块 采用LVDT位移传感器获取音圈电机的高度,在FPGA定义通信协议,通过串口URAT传输。
执行机构 采用音圈电机作为执行机构。音圈电机具有高频响应、精度高、直接驱动等优点,被广泛应用于行程小但精度要求很高的控制系统中。
驱动电路 采用美国整流公司的IR2130驱动芯片设计功率驱动放大电路,用以驱动H桥电路来控制音圈电机。
2 硬件系统设计
2.1 传感器模块
位移传感器采用英国RDP公司的LVDT位移传感器。LVDT电感式位移传感器是由1个初级线圈和2个二次线圈组成,线圈缠绕在空心轴上,磁芯可以在空心轴中移动。初级线圈连接到1个激励的交流电源,当磁芯移动时,在二次线圈中形成互感电流。二次线圈A和B以串联的方式连接,Va和Vb反相输出,传感器的输出为Va与Vb之差[2]。当铁芯处于中心位置时,二次线圈产生等量但反相的电压,此时输出为0;当铁芯向某一方向移动时,二次线圈中的电压升高或者降低,另一个二次线圈电压变化则相反。传感器的电压输出与音圈电机位移成正比,因此,知道励磁信号的输出电压和相位就能确定音圈电机的位置和运动方向。
2.2 信号采集模块
信号采集模块整体框架如图2所示。LVDT位移传感器的输出信号是-5 V~+5 V的模拟电压。模拟信号经过AD芯片,转换为数字信号输出给FPGA,并在FPGA中定义通信传输协议。

图2 信号采集模块的设计方案Fig.2 Design diagram of signal acquisition module
将LVDT输出的模拟信号给AD之前,需将单路的模拟信号转换为双路的差分信号。设计的电路如图3所示,为了保证信号精度,差分电路需采用精度为0.1%的高精度电阻。

图3 差分运放电路Fig.3 Differential-operational amplifying circuit
模数转换芯片采用ADI公司的AD7762芯片,AD7762是一款高性能、24位输出、高带宽的高性能芯片,该芯片内置低通数字FIR滤波器,最高采样频率为40 MHz。当以625 kSPS采样时,信噪比可达106 dB,因此选用此款芯片进行高速数据的采集。AD7762读写时序如图4、5所示。
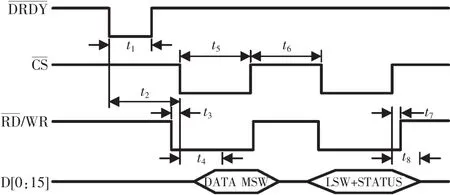
图4 数据读取时序图Fig.4 Parallel interface timing diagram

图5 数据写入时序图Fig.5 Register write timing diagram
FPGA选用Altera公司的EP3C25E144C3N,利用Quartus 11.0软件对FPGA进行编程,从而实现AD7762的数据读写时序和信号传输通信协议[4]。
通信协议中通信波特率设置为115200 b/s,前2个字节作为起始位的判断标志。
DSP2812处理器通过RS485串口来读取信号采集模块的数据,来获得音圈电机的实时高度。
图6为外力驱动音圈电机位移曲线,外力为往复运动规律,X轴表示采集点数,采集频率为10 Hz,Y轴表示音圈电机的位移。
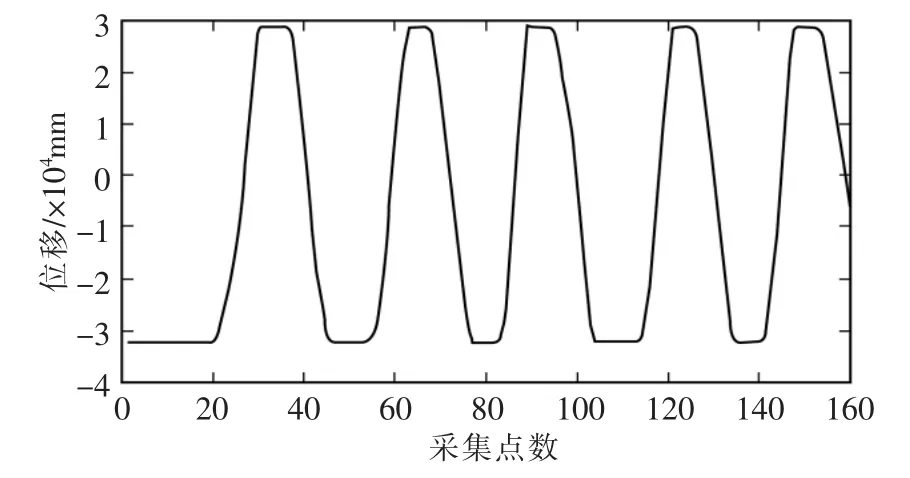
图6 对信号采集模块测试仿真曲线图Fig.6 Simulation diagram of signal acquisition module
从图中可以看出,实验数据采集频率达到设计要求,满足实验需要。
3 驱动电路模块
功率驱动放大电路芯片采用美国整流器公司生产的IR2130驱动芯片。IR2130是一款高电压、高速度驱动芯片,通过3个独立的高侧和低侧输出通道来驱动MOSFET和IGBT。内置运算放大器通过外部电流敏感电阻来提供桥电流的模拟反馈[3]。
IR2130的开关时间只有425 ns,死区时间只有2.5 μs,满足驱动要求。图7为设计的功率驱动放大电路。

图7 功率驱动放大电路Fig.7 Power amplifier circuit
4 运动控制模块
控制系统采用DSP2812作为控制器,2000系列的DSP主要特点是内部集成了很多电机控制所需的外设模块,同时还集成了一定容量的FLASH存储器和随机存储器RAM,时钟频率为150 MHz,所以该系列的DSP非常适合应用于实时性要求不高的运动控制场合[5]。
4.1 算法设计与实现
软件部分使用CCS3.3软件编程,CCS3.3是TI公司的一款高性能开发软件,可以开发除了TI3000系列以外的所有DSP[6]。控制系统程序流程如图8所示,通过位置环对音圈电机执行机构进行闭环控制。控制系统过程中对读取的音圈电机数字高度进行FIR滤波,以减少由于传感器通信模块的传输错误造成的误差。
测量的实时性是提高控制精度的重要因素[7]。从FPGA传输出来的音圈电机位移数据,实时不断通过RS485发出,在算法中通过SCI中断来读取RS485的数据。RS485是以8位的数据格式发出数据,SCI中断子程序根据通信协议将接收到的数据解析成16位的音圈电机实时高度。

图8 控制系统的程序流程图Fig.8 Program flow chart of control system
根据判断是否按照顺序依次接收到AA、55,若满足条件,则取后两位按照顺序高低位拼接成16位数据。若不满足条件,则舍弃。
SCI中断子程序:接收信号采集卡不断传输的数据,并根据上述通信协议确定音圈电机的高度,实时更新数据。
定时器中断:读取音圈电机的高度,并通过改进的PID算法对音圈电机控制。通过程序调试发现,定时中断为1 ms时效果较好。
4.2 设计系统测试结果
给定音圈电机执行机构阶跃信号,音圈电机的响应曲线如图9所示。
根据响应曲线计算得到E-Pin升降机构控制系统的稳态误差为0,超调量σ%=21.893%,调节时间tS=0.5 s,说明设计的控制系统稳定性、准确性、快速性满足要求。

图9 音圈电机的响应曲线Fig.9 Response curve of the voice coil motor
5 结语
本文针对E-Pin升降机构吸附硅片准确定位问题,采用TI公司2000系列的DSP和Altera公司的FPGA,设计信号采集模块,自定义信号传输协议,以音圈电机作为执行机构,设计了E-Pin升降机构的控制系统,实现对吸附的硅片在上下直线运动中快速准确定位。通过实验表明,控制系统的准确性、快速性、稳定性达到要求。
[1] 谷林.光刻机工件台和掩膜台同步控制研究[D].哈尔滨:哈尔滨工业大学,2013.
[2] 戴克中.一种新型的 LVDT 传感器[J].传感器技术,1991,3(1):19-20.
[3] 刘丽丽.音圈电机位置伺服控制系统的研究[D].哈尔滨:哈尔滨工业大学,2010.
[4] 夏宇闻.Verilog数字系统设计[M].北京:北京航空航天大学出版社,2008.
[5] 苏奎峰,吕强.DSP原理及C语言程序开发[M].北京:北京航空航天大学出版社,2008.
[6] 万明山.TMS320F281X DSP原理及应用实例[M].北京:北京航空航天大学出版社,2007.
[7] 陈兴林,刘川.精密运动控制平台宏微控制系统的设计[J].中南大学学报,2013,6(6):2318-2322. ■
猜你喜欢
环球时报(2022-09-29)2022-09-29
汽车实用技术(2022年7期)2022-04-20
发明与创新(2021年17期)2021-07-05
军民两用技术与产品(2021年12期)2021-03-09
房地产导刊(2020年11期)2020-12-28
华声文萃(2020年10期)2020-10-21
中国电子报(2020年56期)2020-09-13
文萃报·周五版(2020年31期)2020-08-19
学生导报·东方少年(2020年5期)2020-07-16
铁道通信信号(2019年4期)2019-10-10
