月球中继通信与导航技术研究进展和建议
2014-03-06 12:08:34刘磊北京航天飞行控制中心航天飞行动力学技术重点实验室
国际太空 2014年4期
刘磊(北京航天飞行控制中心航天飞行动力学技术重点实验室)
月球背面、两极和边缘等对地不可见区域的探测或将是未来月球探测中的重点,其中继通信与导航问题亟待解决。为此,笔者对月面中继通信、月面定位与连续巡视的导航以及星间自主导航需求,广泛调研月球探测的中继通信和导航方式的国外研究进展,提出基于平动点的中继通信和导航方式作为未来月球探测任务的通信与导航手段,并给出了后续研究建议及应用前景,可为我国后续月球及深空探测任务中的中继通信与导航方式提供有益借鉴和参考。
1 引言
月球探测活动对于人类具有十分重要的意义,在过去50多年深空探测任务中,实施载人探测的只有月球,从技术难度和应用价值来看,未来很长一段时间内,月球探测将仍然是国际深空探测活动的一项重要内容。
从月球探测内容来看,美国和苏联的9次月球软着陆和采样返回任务均在月球正面,从而使得人类对于月球背面和两极地区知之甚少。然而,1994年“克莱门汀”(C lem entine)探测器在月球南极发现了太阳系中最大最深的撞击盆地——“艾托肯”(A itk en)盆地,1998年“月球勘探者”(Lunar Proproctor)探测器发现了月球南北极水冰,使得人们意识到月球两极和背面可能蕴含丰富资源,具有更大的探测价值。美国航空航天局(NASA)空间探测构想中的10个载人登月着陆点,有6个在地面不可见的月球两极、背面和边缘地区。因此,这些月球对地不可见区域或将成为未来月球探测的重点,对这些不可见区域的中继通信、月面定位和月面巡视探测的导航成为其中亟待解决的关键问题。同时,未来自主采样返回和载人登月甚至月球基地建立等,将会使得地月、月地、环月、月面下降和上升,以及对接等飞行任务常规化,从而使得地面测控网压力倍增,甚或不能满足未来任务需要,因而未来月球探测任务必须具备自主导航能力以减轻地面测控压力,月球探测器的自主导航由此成为未来月球探测需要解决的另一个关键问题。
2 研究现状
在以往月球探测任务中,月球探测器各飞行阶段的导航均依靠地面支持,载人登月的着陆探测点和月面下降及上升段也位于月球正面,因而月球中继通信需求相对较小。然而,在月球两极发现水冰后,月球两极和背面等对地不可见区域蕴含的巨大探测价值凸显,月球中继通信与月面定位导航受到国内外学者的高度关注。从目前国外研究进展看,月球中继通信与导航主要有利用环月轨道和基于地月平动点轨道两种方式。
环月方式的中继与导航
环月轨道可以实现全月面覆盖,并且可与月面巡视器近距离通信,同时其轨道特性与地球卫星近似而便于理解和应用,一直以来是月球探测中继通信和导航定位的首要考虑手段。
在利用环月星座的中继通信方面,为了满足美国时任总统布什曾经提出的返回月球构想中的月球背面和两极等区域的中继定位需求,美国航空航天局进行了一系列研究:①基于7个类型和构型不同的环月星座,研究月球中继覆盖性能,提出可用于评估稀疏星座性能的精度因子概念,研究表明全月面覆盖至少需要5颗卫星。②研究4星混合星座和6星Lang-M eyer星座的月面覆盖性能,但前者不能提供单重全月面覆盖,而后者布设代价较高。③研究利用椭圆极月轨道作为月球南极探测的中继通信手段,同时结合地基提供地月空间和月球附近的通信与导航。④研究低成本3星椭圆月球中继星座,用于对月球南极的连续覆盖。⑤研究基于高度50~400km的月球倾斜圆轨道星座和极月圆轨道星座,作为月球中继卫星网。靠近月球的中继卫星获得地面测控站信号,然后通过星间链路转发给其他不同倾角的中继卫星,这些卫星将信号转发给月面终端或人员,各中继卫星同时完成月面终端之间或者到地面测控站的信号传输。⑥基于月球背面和南极探测需求,研究集成月球中继通信和科学探测的卫星,并选取极月椭圆轨道作为中继探测轨道。
在月面巡视导航方面,目前主要包括地面遥操作、半自主和自主3种方式。1970年前,苏联的月球车-1和1997年美国的“旅居者”(Sojourner)火星巡视器均为地面遥操作,2004年美国的机遇号和勇气号火星车具备半自主能力,因此这些巡视器只能间歇运动,无法长时间连续巡视。
从发展趋势、月面环境复杂性以及背面探测需求来看,未来月面探测必须具备支持连续巡视的自主导航能力。目前,月面巡视探测的自主导航方法主要有惯性导航、天文导航和视觉导航。惯性导航具有误差随时间积累的缺点;因受测量仪器精度限制,天文导航的短时精度不高,且输出信息不连续而不能提供速度信息;视觉导航是一种相对导航,只适用于短距离的障碍检测和路径规划。因此,如果要在月面长距离导航中获得鲁棒性较好、精度较高,且能满足不同定位需要的位置信息,往往考虑中继卫星导航或者组合导航方法。在月球中继通信与导航应用方面,未来还需做进一步深入研究。
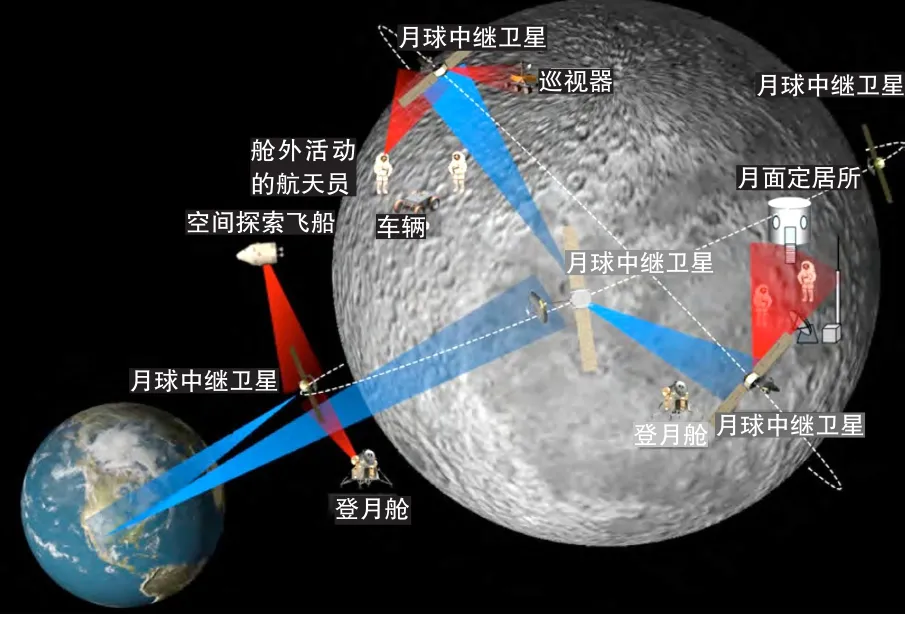
在月球背面进行探测中继的低轨卫星
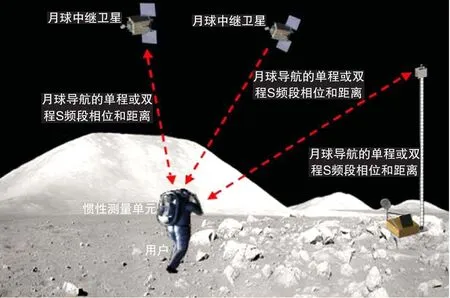
利用月球中继卫星和惯性设备的月面导航
基于平动点的中继与导航
虽然环月轨道用于月球中继通信与导航方面,具有实现方式较为简单、月面距离近等优点,但是其运动特点决定单颗卫星无法实现对月球背面等不可见区域的连续通信,如果利用多颗卫星组成星座,又会带来测控复杂和成本增加等问题。而将中继通信与导航卫星放置于地月平动点,借助平动点轨道运动特性,则可以利用单颗卫星实现对月球背面等不可见区域的连续通信。
(1)平动点中继导航研究
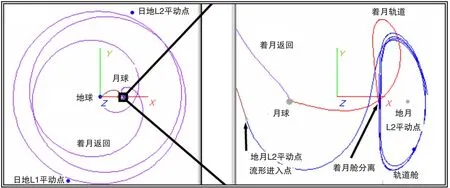
月球自动采样返回轨道设计
1961年,美国提出在地月平动点放置中继通信卫星的设想,1966年又提出了平动点导航概念,其中包括地月L2点月球中继卫星导航,可以提供月球背面和大范围月面导航和通信能力,利用地月L1点进行探月任务交会对接,利用地月L4点和L5点提供深空中继通信和导航。阿波罗-17载人登月飞船最初的着陆点就选在月球背向地球的一面,当时计划在地月L2点附近布置一颗中继卫星,以支持着陆任务,后来由于经费削减,着陆点改在了月球正面,L2点中继计划随之取消。不过,此后美国航空航天局依然就一些应用进行了专项研究,如利用地月系共线平动点轨道卫星探测月球南极;利用月球背面大尺度晕轨道卫星实现月球背面探测的中继通信;利用地月晕轨道卫星和绕月卫星间的星-星测距实现自主导航等。2002年,美国研究人员利用“星际公路”(IPS)理论初步设计并计算了利用平动点晕轨道实施探月和月球取样返回的轨道。由于计划采样的“艾托肯”月面盆地无法与地面直接通信,因而准备将轨道器放置于月地L2点周期轨道上,形成与地面的中继通信链路。
研究表明,仅利用两颗晕轨道卫星即可实现对月球南极的连续覆盖,3颗这样的卫星则可以提供冗余覆盖。研究人员对结合“全球定位系统”(GPS)增强信号和地月L2点对地月转移轨道的自主导航进行了研究,结果表明导航精度可达1km和5cm/s;并在对比平动点中继和环月轨道中继方式之后,认为地月平动点中继与导航方式更适合于未来的月球和行星际探测任务。
在利用平动点的自主导航方式上,有一种以星-星跟踪测量(SST)方式实现自主定轨的方法,但是这种方法只能在有限时间内实现定轨,时间稍长时航天器则会出现整体轨道漂移现象,因此普遍认为SST方式无法用于星间绝对定轨。后来,又提出一种行星际联合自主导航(LiA ISON)技术,该技术基于平动点独特的动力学特性,仅利用SST星间测距或测速方式,即可实现平动点导航卫星与用户卫星的联合自主定轨,从而能大大提高航天器的自主导航能力,减轻地面测控压力。研究人员基于LiA ISON技术研究了地球静止轨道卫星和地月L1点晕轨道卫星的自主导航,不过LiA ISON技术在高精度滤波算法等方面有待提高。尽管如此,LiA ISON技术或许会使得平动点导航成为可能。
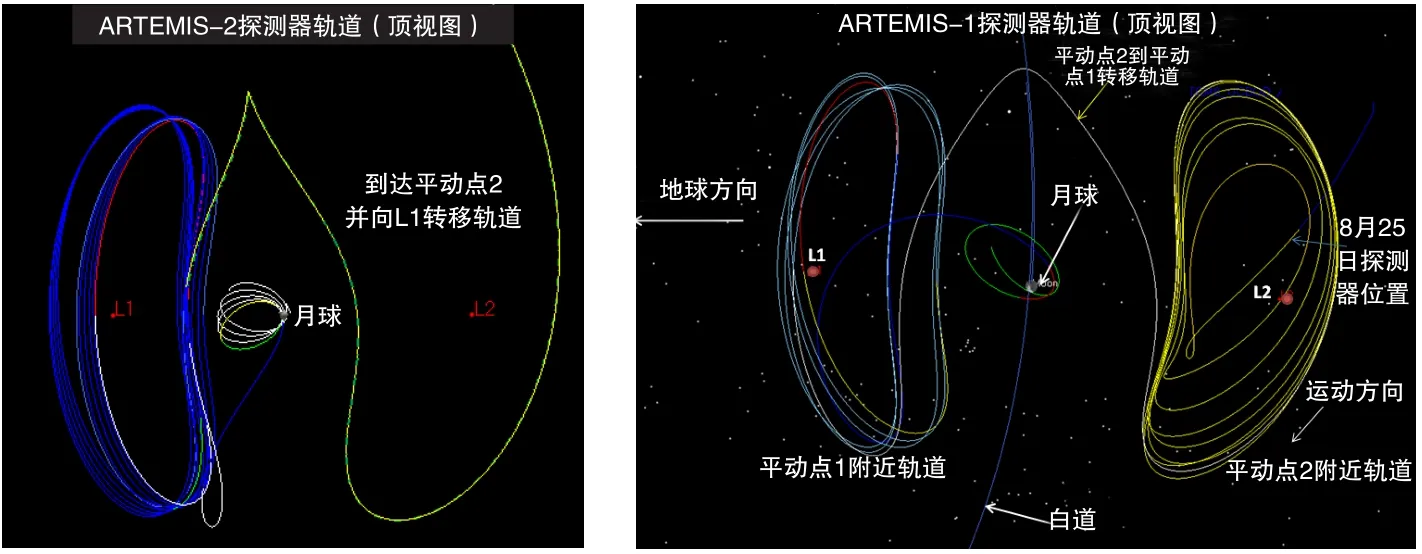
“阿蒂米斯”任务的两个探测器轨道示意图
(2)地月平动点任务
虽然世界上已经发射了10余个平动点卫星或探测器,我国嫦娥-2月球探测器也进入过日地L2点的利萨如轨道,但是在地月系平动点实际利用方面,目前仅有欧洲“阿蒂米斯”(A rtem is)任务。该任务的两颗卫星在2010年分别进入地月L1和L2平动点,经过约11个月的轨道维持,最终进入环月轨道。
“阿蒂米斯”任务向地月平动点的实际应用迈出了可喜的一步,但是在利用平动点实现中继通信与导航方面还未能进入实际应用阶段。目前,国外平动点卫星自身的导航定轨主要依靠地面测控。国际日地探测者-3(ISEE-3)卫星的定轨方式是使用21天地面观测数据,定轨精度6km;“太阳与日光层观测台”(SOHO)卫星则利用深空测控网的26m、34m和70m测控站21天数据来跟踪定轨,定轨精度约7km;“先进成分探测器”(ACE)卫星是第一个运行在日地利萨如轨道的航天器,它采用深空测控网的26m和34m测控站跟踪,定轨弧长4~14天,定轨精度约10km;“微波各向异性探测器”(MAP)卫星是第一个在日地L2点的航天器,利用34m和70m天线跟踪,定轨弧长为14~72天,定轨精度约2km;我国嫦娥-2探测器执行的日地L2点任务,定轨弧长为20天,定轨精度优于10km。相比之下,“阿蒂米斯”地月平动点任务的定轨精度可达100m和0.1cm/s。由此可见,由于距离地球较近,定位于地月平动点轨道的探测器的测定轨精度远高于日地平动点探测器,同时前者对通信载荷的要求也远低于后者,因此将卫星放置于地月平动点,从而为深空探测器提供中继通信与导航服务是非常有利且可行的。
进展分析
基于以上国外研究进展可见,当前在月球探测的中继通信和定位导航方式上,主要有环月轨道和地月平动点轨道两种方式。前者具有实现方式简单、距离月球较近、有地球卫星轨道理论研究基础可供借鉴等优点;后者则具备相对于地球和月球背面始终可见,同等月面覆盖所需的卫星数少,光照时间长,月面用户的视运动慢而易于天线跟踪等优点。综合考虑这两种方式的特点,笔者认为基于平动点的中继通信与导航或可成为未来月球探测任务的首选方式。
从实际应用角度来说,利用地月平动点提供月球探测的中继通信与导航服务还存在多方面问题需要解决。虽然国外于50年前就已提出平动点中继通信概念,并开展了相关研究,但是研究深度有限。在月面巡视导航方面,国外已开始研究基于环月星座的月面连续巡视的导航问题,但是尚无利用平动点进行月面导航的相关研究。在导航方法上,国外基于地月平动点提出了行星际联合自主导航方法,得到初步仿真结果,不过仿真的用户星轨道类型有限,尤其是在严格理论证明和高精度滤波算法等方面有待开展深入理论研究。
3 研究建议
对国外研究进展的分析得出,相对于环月方式,基于平动点的中继通信与导航方式对于未来月球探测任务更具价值,值得进行深入研究。笔者建议,从以下方面开展进一步的相关研究工作。
首先,面向中继通信与导航应用的平动点星座设计。未来月面不可见区域探测及月面大范围活动等方面均有中继通信需求,由此可能需要在多个平动点轨道和相位上布设多颗中继卫星,形成一定构型并组成平动点星座才可满足需求,因此需要研究多种约束条件下的平动点星座最优设计。
其次,基于平动点星座的月面定位与导航。一方面,地月平动点星座受限于卫星数目,对月面的覆盖较为稀疏,因此月面定位条件远不如GPS星座方式;同时由于独特的运动特性,地月平动点星座不能直接采用GPS方式评估月面定位精度和星座定位性能等。另一方面,受限于星载设备的质量与功率等限制,地月平动点卫星的通信和导航设备性能和精度会低于地面遥操作设备,其通信与导航信号异常情况也可能高于地面设备,因而需要研究对应的平动点导航技术和方法。
最后,基于平动点星座的航天器自主导航。目前研究表明,基于平动点的SST手段可以实现星间绝对定轨,不过该方法的适用性和理论性还有待深入研究;因此基于平动点星间测量的自主导航可行性的理论证明,尤其是在有限SST观测条件下的自主导航方法需要深入研究。
4 应用前景
从我国航天发展来看,航天活动范围正从近地向深空发展,月球将是我国未来较长时间内深空探测的重点。本文所讨论的基于平动点的中继通信与导航方法,可用于未来月球探测的中继通信、月面定位和巡视导航以及探测器各飞行阶段的自主导航,在弥补地面测控不足、减轻地面测控压力和提高探测器自主能力等方面具有重要应用价值,因而该方法应用前景广阔。
第一,可用于月球对地不可见区域探测和大范围月面活动的中继通信和月面定位与导航。地球中继卫星放置于地球静止轨道上,即可和地面测控站形成相对稳定的几何关系。月面对地不可见区域的中继卫星只能放置于地月平动点轨道,才可与月球和地球形成较为稳定且始终可见的观测几何。因此,可为我国探月三期工程和未来载人登月等月球探测提供可靠的中继通信和月面定位与导航服务。
第二,可用于未来地月空间航天器的自主导航。利用地月平动点星座对未来探月任务各飞行阶段和导航卫星自身进行导航,有望提高航天器自主能力和轨道精度,降低地面测控压力,节省任务成本,从而可为未来月球探测任务提供高精度自主导航方案。
第三,可用于其他深空探测任务。利用地月共线和三角平动点与地基测控网,可以组成地月空间甚长基线,从而满足火星等深空探测的行星际中继通信和自主导航需求。另外,地月平动点星座还可以考虑搭载其他载荷,作为观测太阳和宇宙背景的绝佳空间天文台,从而将平动点星座的效用最大化。
猜你喜欢
上海航天(2020年6期)2021-01-18 04:50:12
北京航空航天大学学报(2020年1期)2020-02-11 08:15:04
环球时报(2018-12-13)2018-12-13 04:22:37
电信科学(2017年6期)2017-07-01 15:44:35
载人航天(2016年4期)2016-12-01 06:56:13
航天器工程(2015年3期)2015-10-28 03:35:28
太空探索(2015年1期)2015-07-18 11:02:13
电子设计工程(2015年16期)2015-02-27 12:07:46
太空探索(2014年12期)2014-07-12 15:17:12
太空探索(2014年11期)2014-07-12 15:17:00