
一种基于北斗双频单历元姿态测量算法
2014-03-02 23:50黄伦文杨晓婧
数字通信世界 2014年8期
黄伦文,杨晓婧
(1.安徽四创电子股份有限公司,合肥 230031;2.中国交通通信信息中心,北京 100011)
一种基于北斗双频单历元姿态测量算法
黄伦文1,杨晓婧2
(1.安徽四创电子股份有限公司,合肥 230031;2.中国交通通信信息中心,北京 100011)
在北斗双频单历元姿态测量解算中,利用载波相位观测量所构建的方程组是亏秩的,同时利用北斗码观测方程来解决亏秩问题的精度无法保证。因此,本文利用双频相位观测值的宽巷组合,采用LAMBDA搜索方法,首先固定宽巷模糊度,待宽巷模糊度全部固定后,利用宽巷模糊度值和载波相位观测值可解算出B1/B2整周模糊度,进而解算单历元下载体的偏航角和俯仰角。仿真结果表明该方法对北斗单历元下的模糊度和载体姿态角的解算具有很高的成功率。
北斗双频;单历元;姿态测量;宽巷组合;LAMBDA;整周模糊度
1 引言
北斗卫星导航系统(以下简称北斗)是我国独立自主研制的新一代卫星导航定位系统,随着2012年北斗的正式运行和BD_ICD的公布[1],北斗在亚洲的地位越来越重要,开始向中国及周边部分地区提供运行服务。当前,卫星导航定向技术在轮船姿态测量、无人机等飞行载体、自行火炮定位定向,以及雷达等相关领域中的快速实时准确定向,成为卫星导航应用的一个重要研究方向[2-6]。所以,研究北斗单历元定向算法,分析其定向精度和可靠性等指标,为推动北斗产业化具有重要的研究意义。
实现北斗单历元定姿,实现载体的姿态(偏航角、俯仰角)测量的关键,是准确求解该历元的整周模糊度。由于一个观测历元中可用的载波相位观测值较少,仅利用载波相位观测量所得到的方程是亏秩的,无法得到模糊度的浮点解。而将北斗码观测方程与载波相位观测值方程相结合,增加方程个数,使得单历元能够求得模糊度的浮点解。但是码观测值精度较低,很难保证单历元解算正确的整周模糊度[7]。为了提高单历元解算出正确的整周模糊度,本文利用双频相位观测值的宽巷组合波长大特点,采用LAMBDA(the least-squares ambiguity decorrelation adjustment)搜索方法能够有效固定宽巷模糊度,待宽巷模糊度全部固定后,再解算B1/B2整周模糊度。试验表明,本方法能够有效改善整周模糊度的解算结果。
2 姿态测量原理
2.1 坐标系
坐标系统是进行北斗姿态测量的基础。在北斗姿态测量系统中,用到几种不同的参考坐标系。北斗给出的直接数据是天线在地心地固坐标系(ECEF)中的坐标,即2000中国大地坐标系(CGCS2000),为了得出载体姿态数据,需要将CGCS2000中的坐标转换成当地水平坐标系中的坐标,同时也需要定义载体坐标系[8]。几种姿态测量中用到的坐标系定义如下:
(1)载体坐标系(BFS)。载体坐标系的原点定义在天线阵列的主天线相位中心,Y轴与载体运动方向的中心线(主轴)重合,X轴垂直Y轴指向载体右侧,Z轴与X,Y轴构成右手坐标系。
(2)当地水平坐标系(LLS)。当地水平坐标系通常是姿态测量中的参考坐标系,其原点位于主天线的相位中心,Y轴指向当地北子午线,X轴与Y轴垂直指向东,Z轴与X,Y轴正交,服从右手坐标系。
2.2 姿态测量过程
将两个北斗天线1,2分别安置在载体的中心轴点上,以天线1为主天线,并定义天线1的相位中心为站心,即载体坐标系和当地水平坐标系的原点。天线1和天线2组成单基线b1。建立载体坐标系,使得在载体坐标系中b1=(0,b1,0),基线b1在当地水平坐标系中的坐标为b1=(X1LLS,Y1LLS,Z1LLS),b1在两种坐标系中的坐标的转换公式可求得偏航角ψ、俯仰角θ个姿态角。利用基线在LLS系下的坐标可通过载波相位双差方程求得。进行姿态测量,由北斗测得的直接数据是基线在CGCS2000坐标系下的坐标,这就要求将求得的基线向量数据转换到LLS系的坐标,其转化如公式(1)所示
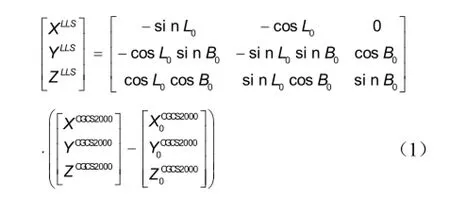
获得姿态角的计算公式为:
偏航角:

俯仰角:

3 北斗B1/B2双频单历元模糊度解算
由于双差组合可以消除接收机钟差和卫星钟差,大大削弱卫星星历误差、电离层误差、对流层误差等的影响[9-10],因此,本文中采用双差组合进行单历元基线解算。
3.1 宽巷模糊度固定
因为宽巷观测值波长较长,模糊度易确定,伪距和宽巷观测值进行最小二乘平差,再来搜索宽巷观测值的整周模糊度。北斗伪距双差观测方程可表示为:

北斗载波相位宽巷双差观测方程可表示为:
(6)是各规格成品砂石料通过地下装车通道,由各规格成品料仓的数控给料机进行装车,替代人工铲车装车,提高装车效率,降低装车成本。

式中,C北斗伪距双差观测值;φW为北斗的B1,B2载波组成的双差宽巷观测值;ρ为双差几何距离;[δX δY δZ]为流动站坐标改正值;[lmn]为测站至两颗卫星的方向余弦之差;λW为φW载波宽巷波长;NW为φW载波宽巷整周模糊度;εC,εW分别为各观测方程的残差项。
北斗双差伪距和宽巷载波观测方程为:

式中,VC,VW分别为观测值C,φW的改正数;X为坐标改正向量;B为坐标改正向量的系数矩阵;LC,LW分别为双差伪距、双差载波相位与双差几何距离之差。
当观测方程个数不少于未知数个数时,可进行最小二乘求解:
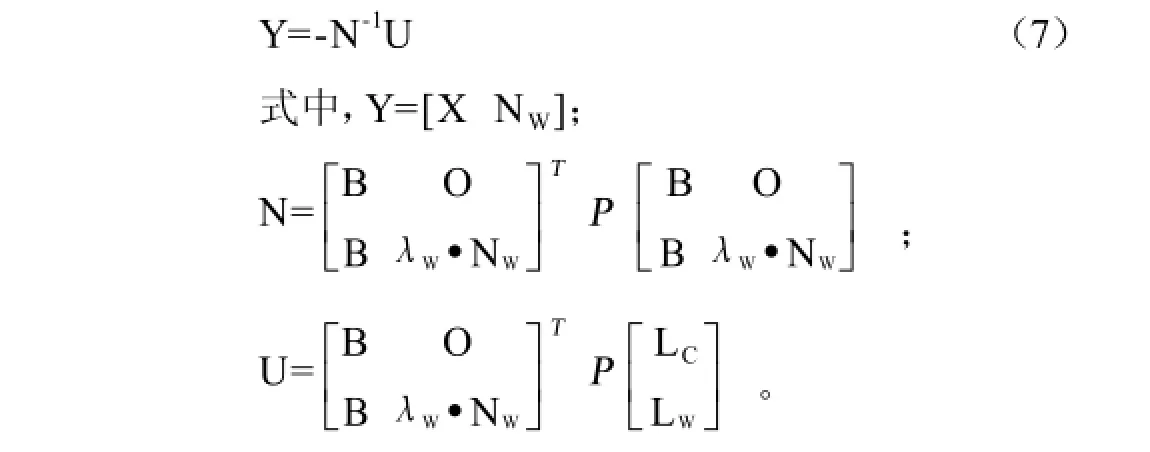
P为权阵,可根据2类观测值的精度来确定。
由于伪距观测值精度低,经最小二乘解出来的宽巷模糊度浮点解精度差,模糊度的搜索空间大,增加了模糊度的固定难度。在本文中,采用分组逐步固定模糊度,先选择方差较小的模糊度组成主模糊度组(大于3个),并得到主模糊度组的实数解和协方差阵,采用LAMBDA方法对主模糊度进行解算。当主模糊度组固定为整数向量后,转化成精度较高(相对于伪距观测值)的距离观测值,回代双差的观测方程。用固定的这部分宽巷模糊度更新观测方程,可以改进所有的参数,包括从模糊度组参数,求得从模糊度实数解及其方差。再使用LAMBDA方法,能够比较容易的得到从模糊度组的固定解,进而将宽巷模糊度组合固定下来。
3.2 双差B1/B2模糊度固定
双差宽巷模糊度固定后,双差宽巷观测值、载波B1观测方程为
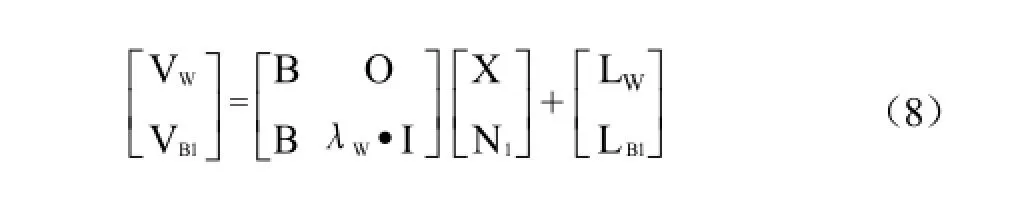
式中,VB1为双差观测值B1的改正数;λ1为载波B1的波长;N1为双差观测值B1的整周模糊度;LB1为双差观测值B1的常数项。式(8)观测方程与式(6)相似,采用相同的方法进行最小二乘解算,得到B1的双差模糊度实数解及协方差阵,再对模糊度进行分组逐步固定。N1准确固定后,B2的双差模糊度N2为:

B1和B2的双差模糊度固定后,便可利用高精度的载波观测值进行单历元基线解算。
4 算法分析
为了验证本文算法的正确性,利用两块司南公司的带有B1,B2频率的OEM板卡以及两个北斗高精度天线,进行单基线的姿态测量解算。在某12楼楼顶较空旷地域进行数据采集,该数据的采样率为1s。根据精确测量手段,放置两天线,将基线长度确定为2米,天线保持基本水平放置。利用观测到的北斗码伪距和载波相位进行单历元姿态解算。选取其中100个历元,根据本文算法进行解算,如图1所示,将每个历元计算得到的基线长度值与2米比较。利用固定好的宽巷模糊度与B1模糊度组合求得的单历元基线偏差在3个厘米以下,固定B1,B2模糊度后基线偏差值能够基本保持在3毫米内,且成功率非常高。
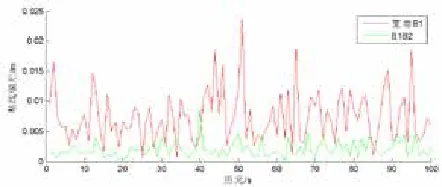
图1 基线偏差
通过单历元解算出北斗双频模糊度后,利用解算获得的初始模糊度值求得基线向量,进而可以求得载体的偏航角和俯仰角,仿真结果如图2所示。
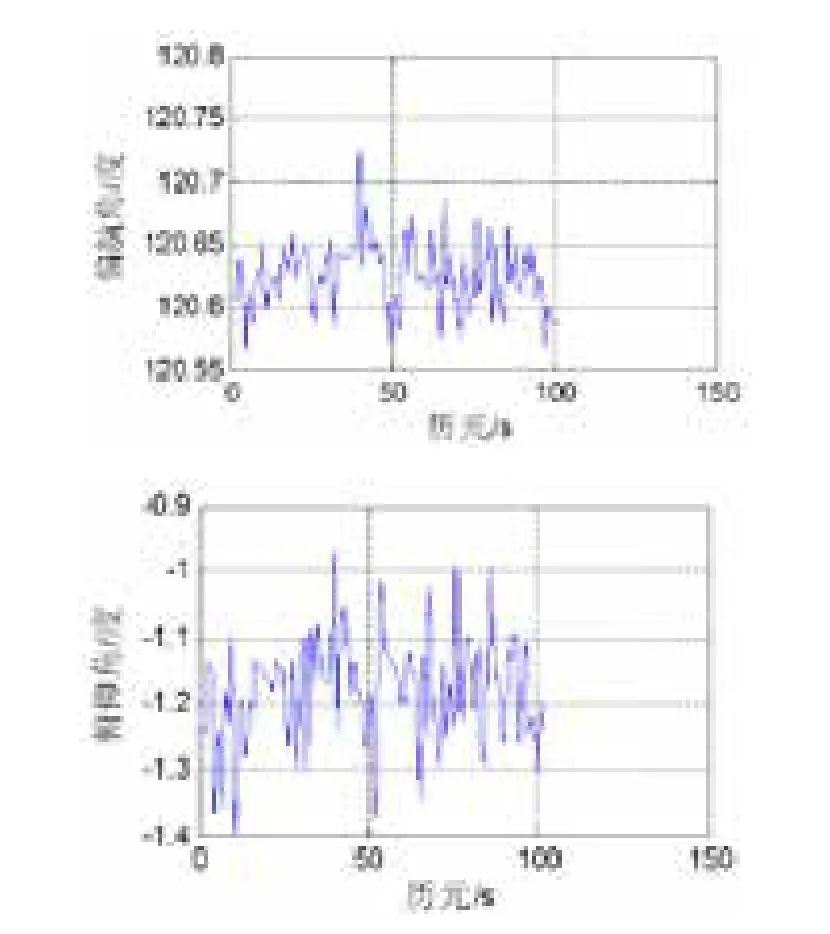
图2 姿态测量值
由图2可知,在2米基线情况下,利用本文方法,载体的偏航角和俯仰角精度分别在0.1°和0.2°左右,说明该方法是行之有效的。
5 结束语
本文采用LAMBDA搜索方法固定宽巷模糊度,待宽巷模糊度全部固定后,利用宽巷模糊度值和载波相位观测值解算出B1/B2整周模糊度,进而求得单历元下的基线向量值,然后解算单历元下载体的偏航角和俯仰角。通过仿真采集的北斗双频数据,分析了仿真结果,结果表明该算法成功率高,在单历元北斗姿态测量研究方面具有一定的实际和研究意义。
[1] 中国卫星导航系统管理办公室.北斗卫星导航系统空间信号接口控制文件(2.0版)[R].中国卫星导航系统管理办公室,2013.
[2] 唐卫明,邓辰龙,高丽峰.北斗单历元基线解算算法研究及初步结果[J].武汉大学学报(信息科学版),2013,38(8):897-901.
[3] 许江宁,朱涛,卞鸿巍.GPS姿态测量技术综述[J].海军工程大学学报,2003,15(3):17-22.
[4] 唐兴.GPS在姿态测量中的应用[D].哈尔滨工程大学,2011.
[5] 王磊,翟国君,黄谟涛.利用北斗多频观测进行舰船姿态测量[J].海洋测绘,2007,27(2):11-14.
[6] 赵文华,王钰,周玲玲.GPS测姿技术在航天测量船的应用分析[J].中国惯性技术学报,2004,12(3):25-27.
[7] 祝会忠,高星伟,秘金钟.一种GPS整周模糊度单历元解算方法[J].测绘科学,2011,36(4):9-11.
[8] 李俊毅.GPS姿态测量及相关技术的研究[D].解放军信息过程大学,2004.
[9] 阳仁贵,欧吉坤,任超.GPS单历元载波相位整周模糊度的解算方法研究[J].长江科学院院报,2005,22(1):32-34.
[10] 孟领坡,吴杰.双频去相关单历元动态解算整周模糊度研究[J].国防科技大学学报,2010,32(1):34-39.
联通震区通信能力已恢复震前水平
8月6日,经过三日的紧急抢修,除八宝尖山基站因道路损毁严重无法修复外,中国联通其他基站全部恢复通信,震区光缆故障已全部抢修恢复,集客电路抢修恢复1条。目前完成11个基站小区扩容工作和1个新建3G基站开通工作,另外一个3G站正在开通中,通信能力已恢复到震前水平。
中国联通从北京调配的1台便携式卫星站、20台卫星应急电话已于8月5日10点到达昭通震区,昭通到北京沙河卫星站电路已经测通,机动局到位的应急基站、卫星电路随时开通。另一台小型卫星车预计今天到达,2套微波及光纤收发器备件已运达昭通震区。贵州联通派出的2辆应急抢修车、7名技术人员携带5台油机、2部海事卫星电话及OTDR等设备已于4日抵达昭通震区,已投入通信保障。以上装备可为指挥调度提供应急通信保障。累计出动抢修人员259人次,抢修车辆52辆次,油机86台,应急通信车1台,小型卫星车1台,便携式卫星基站1个,应急通信设备23台。
截至8月6日,昭通联通建立临时抗震救灾爱心服务站7个,还有2个服务点正在建设,提供了48部手机终端、70个充电宝、便携式充电头30个、插板20个、3套笔记本电脑和上网卡为灾区群众免费提供通信服务,已服务用户数达2 000户,可服务用户达10万户。中国联通已为灾区群众减免8月份话费,尽最大努力为灾区人民提供便捷的通信服务,同时,10010客服热线为联通停机用户紧急开机、提供免停机服务和寻亲热线服务。
An Algorithm of Single Epoch Attitude Determination based on Beidou Navigation Satellite System Dual Frequency
Huang Lunwen1, Yang Xiaojing2
(1.AnHui Sun Create Electronic Co.,Ltd, Hefei, 230031; 2.China TransportTelecommunications & Information Center, Beijing, 100011)
In Beidou Dual Frequency performed single epoch attitude determination solver, the equations use of carrier phase measurements are constructed rank deficient, and the accuracy of solved rank deficit problem with Beidou yards observation equations can not be guaranteed. In this paper, it using the combination of wide-lane dual-frequency phase observations, firstly, fixed wide-lane ambiguity with the LAMBDA search method, when all wide-lane ambiguity were fixed, it can solve for B1 / B2 integer ambiguity with the use of wide-lane ambiguity values and carrier phase measurements, thus solver single correct yaw angle and pitch angle epoch download body. Simulation results show that this method has a high success rate of solution ambiguity and the carrier attitude angle under Beidou single epoch.
Compass Dual Band; Single Epoch; Attitude Measurement; Wide Lane Combination; LAMBDA; Integer Ambiguity

10.3969/j.issn.1672-7274.2014.08.005
TN96文献标示码:A
1672-7274(2014)08-0019-04
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18
测绘学报(2022年5期)2022-05-31
大地测量与地球动力学(2022年1期)2022-01-11
科学(2020年5期)2020-11-26
中国惯性技术学报(2020年2期)2020-07-24
中国惯性技术学报(2019年3期)2019-10-15
测绘通报(2017年10期)2017-11-07
舰船电子对抗(2016年5期)2016-12-13
