高空作业车变幅机构动态特性分析与仿真
2014-03-01 02:53罗天洪贾永清
重庆交通大学学报(自然科学版) 2014年3期
杨 钢,罗天洪,贾永清
(1.重庆交通大学 机电与汽车工程学院,重庆 400074;2.重庆红岩汽车有限责任公司,重庆 400090)
0 引 言
高空作业机械(高空作业车)作为工程机械领域的一个重要分支,广泛应用于船舶、建筑、市政建设、消防、港口货运等行业,是一个新兴的技术产业,有着广阔的发展前景[1]。目前,高空作业车的控制方式都趋向于电液比例控制的方向,采用电液比例换向阀实现作业臂的变幅、转台的回转和作业平台自动调平的技术方案[2]。电液比例换向阀能够实现普通换向阀的换向功能,并能按输入电信号的大小实现流量的调节,从而控制执行机构的运动速度,所以,电液比例换向阀是一种具有普通换向阀功能但性能优于普通换向阀的一种复合阀[3]。变幅动作的平稳性将直接影响到高空作业车的作业安全性和液压元件的使用寿命,液压动力源的机械效率,使液压系统中工作介质的温升加快,作业效率降低。同时,平衡阀作为变幅机构的一个重要的液压元件对系统的运行品质有很大的影响。传统的平衡阀存在着许多缺点,如低频抖动、控制压力偏高、工作平稳性差以及系统功率损失严重等,特别是其调定背压是固定不变的,当负载产生的压力比平衡阀调定的压力高(大负载)时,系统的低频抖动不能完全消除,当负载产生的压力比平衡阀调定的压力低(小负载)时,存在控制压力过高、功率损耗大的问题[4]。工程机械领域目前所采用的多路电液比例换向阀大都采用进口阀,比较知名的品牌有博士力士乐、油研、阿托斯等,这些产品的技术都比较成熟且性能稳定[5]。国内也有液压元件公司从事这方面的研发和设计,但是,在技术、工艺、控制精度等方面都与国外产品存在差距,所以性能上仍落后于国外。国内高校也在进行电液比例阀方面的研发,例如浙江大学流体传动及控制国家重点实验室长期从事电液比例阀的理论和设计方面的工作。
笔者针对国产GKZ14型14 m高空作业车变幅过程中存在着作业臂举升抖动现象严重的问题进行了分析,发现折叠式高空作业车在起升和下降变幅过程中,由于工作重心的变化,会出现超越负载的情况。在出现超越负载时,使用双向外控式的平衡阀,可以实现工作臂来控制执行液压缸工作腔的供给流量保持恒定,防止出现超速下降的危险,提高了系统工作的稳定性和可靠性。笔者根据液压原理图建立了关键元件的数学模型,然后利用AMESim系统建模和仿真软件建立系统的仿真模型,通过仿真方法,从系统和元件的角度进行理论上的分析。
1 变幅机构执行元件数学模型
以国产GKZ14型三折叠臂式高空作业车的变幅执行机构为研究对象,采用典型的摆动液压缸变角机构,举升臂机构采用多路电液比例换向阀组作为液压控制元件。执行机构采用双作用液压缸,图1为该高空作业车变幅机构的液压原理。
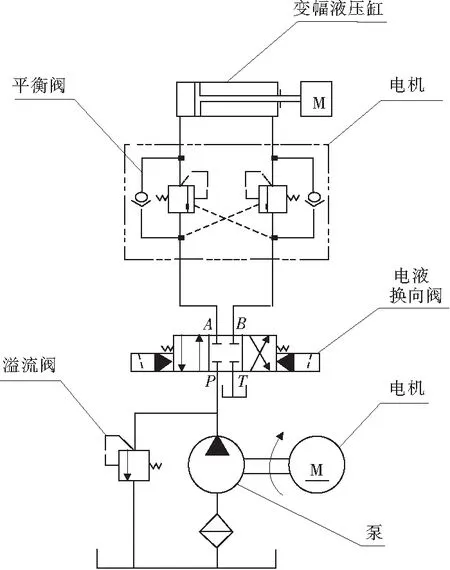
图1 高空作业车变幅机构液压系统Fig.1 Hydraulic system of luffing mechanism of aerial working platform
液压系统动态特性是液压系统在从失去原来平衡状态到新的平衡状态过程中,所表现出来的特性[6]。引起此动态过程的原因主要包括传动与控制系统的过程变化及外界干扰两方面。在这一动态变化过程中,系统中各参变量随时间变化,这种变化过程性能的好坏,决定了系统动态特性的优劣[7]。系统达到新的平衡位置时,各参变量的变化速率和幅度的大小是衡量液压系统稳定性的重要指标[8]。
高空作业车的折叠臂变幅液压系统采用典型的阀控液压缸的驱动形式。图2为下臂的液压原理,中臂和上臂也采用相同的液压系统。

P调1,进口—调速阀1进口处压力;P调1,出口—调速阀1出口处压力;ΔP1—调速阀1处压力变化;P3—液压缸右端压力;P调2,出口—调速阀2出口处压力;ΔP2—调速阀2压力变化;Q调1,进口—调速阀1进口处流量;Q调2,出口—调速阀2出口处流量;pp—方向阀入口处压力;qp—方向阀出口处压力;v—活塞速度;F—液压缸反作用力
图2阀控液压缸模型
Fig.2Modelofvalvecontrolledcylinder
推导得出换向阀-液压缸的耦合数学模型。液压缸进油、回油口流量:

(1)
在忽略油液的可压缩性和泄漏的情况下,有Q调1,进口=Q调2,出口=Q,即:
(2)
P调1,进口-P调1,出口+ΔP1=P3-P调2,出口+ΔP
(3)
忽略液压缸与活塞杆的摩擦力和活塞的自重(假设活塞两端面积相等),活塞缸的受力平衡方程为:
(P调1,出口-P3)A=F
(4)
整个执行机构的压力降为P调1,进口-P4,并且

(5)
(6)
代入式(1)中,得到流经液压缸的流量:
(7)
在计算变幅液压缸的推力F时,由于负载是随着旋转角度而变化的,所以要求出液压缸的等效负载。文中利用能量法求取液压缸的等效负载质量[9]:
(8)
(9)
(10)
对于纯惯性负载有:
(11)
又由于Q=vCA,所以:
(12)
很明显,vC的表达式是一个非线性方程,它描述了液压缸活塞运动速度的变化规律,采用微小扰动法来求得其解析解。

将ΔQ代入Q=vCA中有:
(13)
(14)

所以:
(15)
(16)
即:
(17)
式(17)为在换向阀阀芯的微小位移Δx时,液压缸活塞杆ΔvC的速度变化规律。
2 系统仿真模型
根据变幅液压系统原理图、元件结构原理图和表1的相关参数,应用多领域仿真软件AMESim中HCD功能模块建立系统的仿真模型[10]。

表1 系统仿真参数
HCD功能模块是由基本几何结构单元组成的基本元素库(basic element),用于根据几何形状和物理特性详细构建各种液压元件,例如喷油器、控制阀等仿真模型。该库非常适合对非标的液压元部件的动态特性进行建模和分析[11]。在对高空作业车进行动态仿真时,运用HCD库建立机构的仿真模型,最终建立的仿真模型如图3。
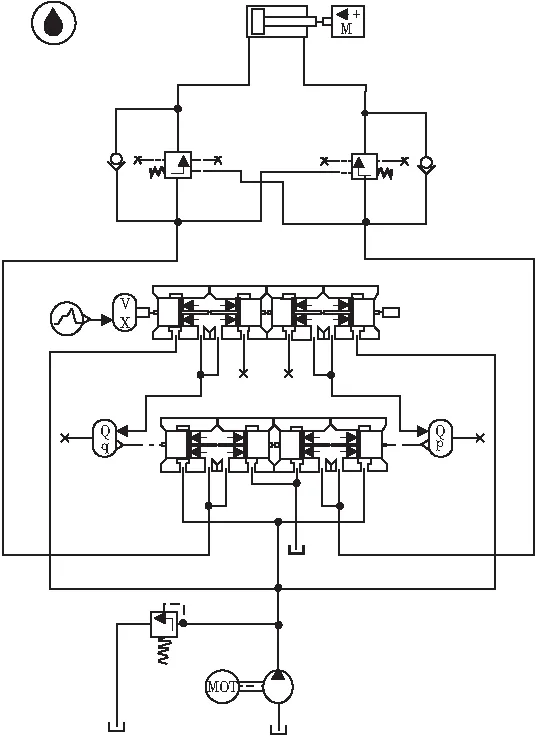
图3 系统仿真模型Fig.3 Simulation model of system
3 仿真实验
为了获得系统的动态特性,模拟了高空作业车变幅起升的典型工况,在仿真时利用阶跃信号给电液换向阀一个启动信号(图4),电液换向阀由零开口直接到最大开口的情况,观察执行机构的输出响应情况[12]。
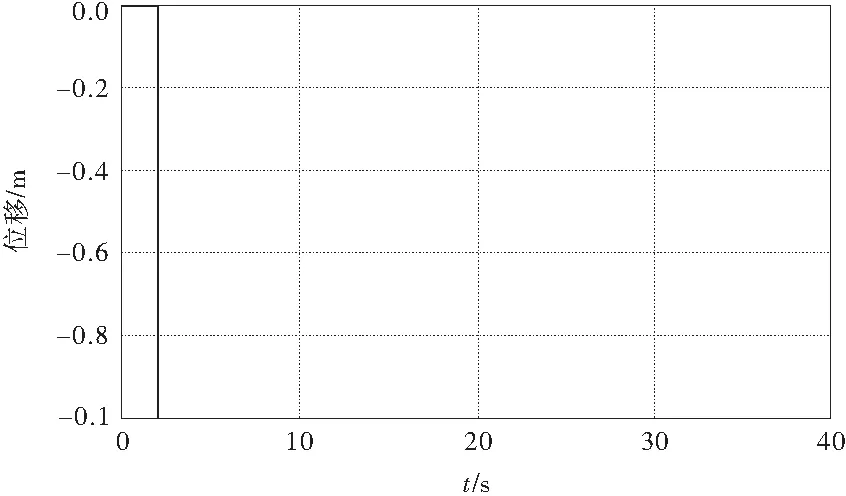
图4 执行器动作信号指令Fig.4 Command signal of actuator
仿真时由于操纵信号是在2 s时给出的阶跃信号,故在前2 s位移为0。2 s时系统启动,活塞杆的伸出位移(图5)随着时间的增加而增大,从图5中可以发现,位移曲线出现波动,这与实际操纵中所出现的现象比较吻合,此时平衡阀开启压力为15 bar。

图5 活塞杆位移Fig.5 Displacement of rod
图6表示经过调节平衡阀开启压力后的位移曲线。
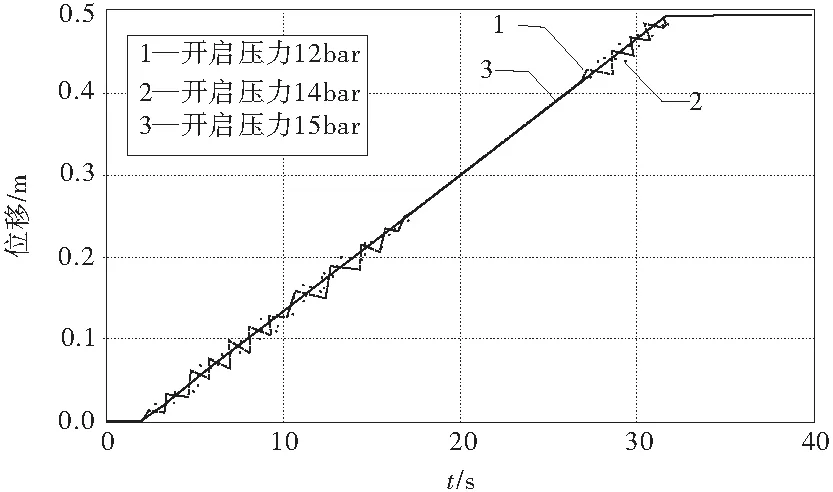
图6 活塞杆位移Fig.6 Displacement of rod
从图7的活塞杆速度变化曲线可以看出,在变幅开始时,活塞杆伸出的运动速度出现较大程度的波动,变幅结束时波动的幅度有所下降,根据换向阀的通径和阀正常工作时换算可得到活塞杆正常的变幅速度为16 mm/s。但是由于阀芯的受力平衡关系破坏,导致阀芯扰动。在15.6 s时偏离正常速度的最大值为3 mm/s,并且波动维持时间较长。

图7 活塞杆速度Fig.7 Velocity of rod
图8中曲线1~曲线3分别是经过调整顺序阀的弹簧预载荷由10 bar调整为12,14,15 bar时,活塞杆伸出的运动速度,由图8可见,速度变化程度明显下降,且接近正常的变幅速度为16 mm/s,连续的速度波动得到抑制。
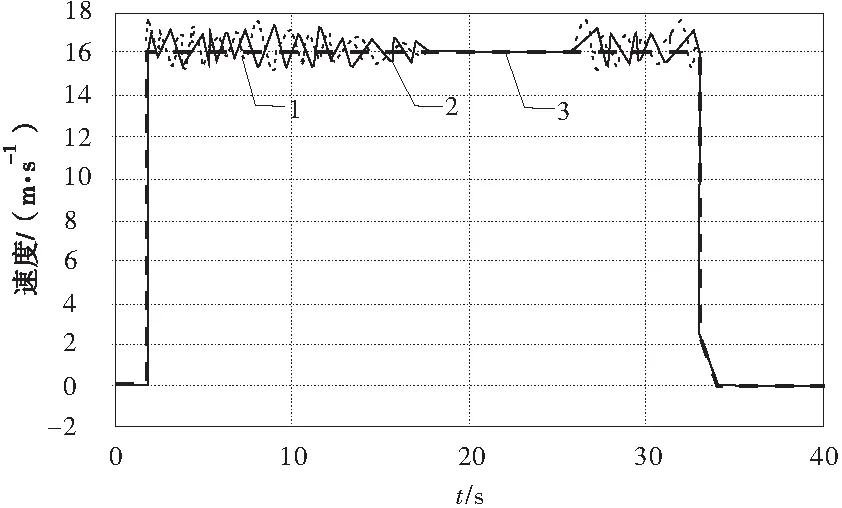
图8 活塞杆速度Fig.8 Velocity of rod
由图9可见,活塞杆伸出时的加速度也有较大程度的波动,并不是按匀速运动的,波动状况维持时间较长。在t= 16.2 s时加速度变化趋于缓和,在接近变幅结束时又出现小幅的波动,总体上和速度的变化比较相似。

图9 活塞杆加速度Fig.9 Acceleration of rod
图10反映了平衡阀的预载荷在由10 bar变化为15 bar时,加速度的变化情况。经过调节弹簧的预载荷,加速度的波动只出现在系统启动和制动时,其余工作时间加速度值是接近0的,也即能够保证活塞杆的匀速运动的要求。

图10 活塞杆加速度Fig.10 Acceleration of rod
通过以上仿真得出,在执行机构启动时,随着液压缸负载的变化,液压缸活塞杆的位移、速度、加速度等参数均表现出不同程度的波动。在举升工况时,在外力(通常是重力)的扰动下,往往引起平衡阀控制压力的波动,这将影响到平衡阀阀芯受力平衡[13],从而引起平衡阀阀芯扰动,受力平衡破坏对外即表现为变幅抖动现象通过仿真发现平衡阀弹簧的刚度对变幅机构的性能影响较大。通过合理调整平衡阀弹簧的刚度可以实现举升臂的运动速度,加速度的调节,消除在变幅过程中的抖动现象。
4 结 语
利用AMESim软件建立了某型高空作业车变幅机构的系统仿真模型,分析了变幅机构在起升变幅工况时的动态特性。当使用双向外控式平衡阀时,在有外力扰动的情况下,阀芯能够很快达到受力平衡,从而使进油流量保持恒定。同时,平衡阀的开启压力要保持适中,太小的开启压力将导致阀芯的载荷变化敏感性,从而引起变幅抖动。如果开启压力过大时,只有载荷变化很大时才能开启平衡阀,会出现短暂性的速度失控现象,所以使用中要结合现场调试来确定平衡阀的最佳开启压力。
[1] 张华,霍玉兰.我国高空作业车行业发展与展望[J].建筑机械,2009(12):38-43.
Zhang Hua, Huo Yulan.Development and prospect of high-altitude operation car industry in China [J].Construction Machinery, 2009(12): 38-43.
[2] 叶建文.电液比例控制阀在工程机械中的应用研究[J].机电产品开发与创新,2007,20(4):3-5.
Ye Jianwen.Application research on electric-hydraulic proportion control valve in engineering machinery [J].Development & Innovation of Machinery & Electrical Products, 2007, 20(4): 3-5.
[3] 杨建辉,侯有良,徐倩,等.基于AMESim的液压起重机负载敏感平衡阀特性仿真[J].建筑机械,2010(8):89-92.
Yang Jianhui,Hou Youliang,Xu Qian,et al.Simulation on load-sensing counterbalance valve’s characteristic on hydraulic crane using AMESim [J].Construction Machinery,2010(8): 89-92.
[4] Zhang Wanfang,Liao Hui.Design and research of performance of automated test system of electro-hydraulic proportional valve [C]. Ningbo,Zejiang,China:International Conference on Electronics,Communication and Control, 2011.
[5] 强宝民,刘保杰.电液比例阀控液压缸系统建模与仿真[J].起重运输机械,2011(11):35-39.
Qiang Baomin,Liu Baojie.Electro-hydraulic proportional valve hydraulic cylinder system modeling and simulation [J]. Hoisting and Conveying Machinery, 2011(11): 35-39.
[6] 吴榕,唐雯,林文祥.减压阀动态性能仿真分析与测试[J].厦门大学学报:自然科学版,2011,50(5):847-851.
Wu Rong,Tang Wen,Lin Wenxiang.Dynamic performance simulation of pressure relief valve and test [J].Journal of Xiamen University: Natural Science, 2011, 50(5): 847-851.
[7] Chen Guojin,Zhu Miaofen,Su Shaohui,et al.Research on the multi-domain modeling and optimizing method for loader executing system [C]. Changsha,Hunan,China:International Conference on Intelligent System Design and Engineering Application, 2010.
[8] Liu Guanghui,Luo Xin.Modeling and simulation of the height control system for cutter of cotton top-cutting machine electronics [C]. Ningbo,Zejiang,China: International Conference on Electronics,Communications and Control, 2011.
[9] 胡燕平,甄海华,姚佳.直动式电液比例减压阀频响特性研究[J].机床与液压,2010,38(19),18-20.
Hu Yanping,Zhen Haihua,Yao Jia.The investigation on frequency response characteristics of direct operated electro-hydraulic proportional pressure-reducing valve [J].Machine Tool & Hydraulics, 2010, 38(19), 18-20.
[10] 冀宏,梁宏喜,胡启辉.基于AMESim的螺纹插装式平衡阀动态特性的分析[J].液压与气动,2011(10): 80-83.
Ji Hong,Liang Hongxi,Hu Qihui.Dynamic analysis of hydraulic screw-in counterbalance valve based on AMESim [J].Chinese Hydraulics & Pneumatics,2011(10): 80-83.
[11] Dong Jinbo,Ren Sijing.Research of synchronization control system based on electro-hydraulic proportional valve [C]. Taiyuan,Shanxi,China: International Conference on Computer Application and System Modeling, 2010.
[12] Ma Qian,Kong Xiangdong,Yao Jing.Research of the influence factors of the accumulator fast forging hydraulic control system [C]. HongKong:2010 IEEE International Conference on Automation and Logistics, 2010.
[13] Zeng Yihui,Liu Shaojun,Zhang Xiaojian.A simulation study on the walking hydraulic system for tracked nodule collector for sea floor mining on the basis of AMESim platform [C]. Changsha:2010 International Conference on Digital Manufacturing and Automation, 2010.
猜你喜欢
农业装备与车辆工程(2021年10期)2021-11-03
露天采矿技术(2021年1期)2021-03-07
建筑机械(2020年7期)2020-08-05
水电与新能源(2019年10期)2019-11-06
装备制造技术(2019年8期)2019-10-23
北京航空航天大学学报(2019年8期)2019-09-10
电子制作(2018年19期)2018-11-14
汽车文摘(2017年2期)2017-12-04
河南工学院学报(2017年1期)2017-06-07
工业设计(2016年6期)2016-04-17