
高山峡谷地区无人机影像空中三角测量的应用研究
2014-02-27 10:24:33赵杏英
大坝与安全 2014年3期
吴 磊,赵杏英,陈 光
(浙江华东测绘地理信息有限公司,浙江杭州,310030)
高山峡谷地区无人机影像空中三角测量的应用研究
吴 磊,赵杏英,陈 光
(浙江华东测绘地理信息有限公司,浙江杭州,310030)
简要介绍了普通相机检校的原理和影像的畸变差纠正,论述了高山峡谷地区无人机航测空中三角测量作业流程,并结合具体实例,探讨了高山峡谷地区无人机影像的空中三角测量技术。
无人机;摄影测量;空中三角测量
1 引言
随着电子技术的飞速发展,轻型无人机在远程遥控、续航时间、飞行品质上有了明显的突破,成为近几年兴起的新型航空遥感手段,特别是飞行自动控制、数字传感器小型化等关键技术的突破以及国家低空空域有序开放的政策调整[1],为低空无人机航测技术的发展带来了新的契机。无人机航测技术具有全天候、全天时、低成本等优势,其获得的高分辨率影像数据可应用于多种领域,适合于我国信息化发展的需要[2]。
本单位水电项目一般都处于高山峡谷的河流地区,地形比较复杂,高差很大,交通不便,作业难度极大,外业技术人员安全有时得不到保障。将无人机航测技术应用到高山峡谷地区的水电项目,不仅有助于减少外业工作量,保障技术人员安全,提高成果精度,而且能够提供高分辨率的影像数据,为水电站的规划设计提供高精度的基础地理信息成果。
然而高山峡谷地区高差大,风也大且风向变幻莫测,这不仅为无人机航摄的航线设计带来了很大困难,而且致使无人机的姿态相较一般区域差很多,这就为无人机影像数据的空中三角测量带来很大挑战。空中三角测量时摄影测量工作的关键步骤,其成果的精度直接影响着后面各种成果的精度,甚至会导致内业成图无法进行。因此,探讨高山峡谷地区这种高差大、姿态较差的无人机影像数据的空三加密具有十分重要的意义,有助于促进无人机航测技术在高山峡谷地区的应用。
2 普通数码相机的相机检校[3,4]
无人机航摄系统搭载的相机一般为非量测相机,在进行航空摄影前需对相机进行检校以满足航空摄影测量对相机的要求,相机检校质量的好坏对后续成果有重要影响。
普通数码相机检校的目的是恢复影像光束的正确形状,即通过检校获取影像的内方位元素和构像畸变系数。检校内容包括:主点坐标(x0,y0)的测定、主距(f)的测定、光学畸变系数的测定、CCD面阵内畸变系数的测定。
检校采用基于空间后方交会的数学模型进行。它是以共线方程为基础,以像点坐标作为观测值,解求相机的内外方位元素、畸变系数以及其他附加参数。考虑改正项后的共线方程式为:
以像点坐标为观测值,其误差方程式为:

式(2)中,XE为影像外方位元素;XI为影像内方位元素;XAD为附加参数,主要包括光学畸变改正项和CCD面阵内畸变改正项。影像畸变纠正的数学模型为:

式(3)中,ki为径向畸变系数;Pi为偏心畸变系数;B1为像素形状改正系数,B2为面阵坐标轴改正系数,改正项Δy中的数值xB2+yB1接近于零,有些参考资料中省略了该项。
3 无人机影像的畸变差改正
普通数码相机不是专门为摄影测量而设计的,虽然在进行航空摄影前对其进行了相机检校,但利用其获取的影像数据还是存在着光学畸变差。在焦距固定的情况下,镜头畸变属于系统误差,它对每幅影像所产生的影响是相同的。因此,在进行区域网空中三角测量前,需要先进行像点坐标畸变差改正。图像的畸变差改正可以分两种:一种是直接改正法,从畸变图像出发,计算图像上每个像素的改正坐标,实现图像的改正;另一种方法是间接改正法,从改正图像出发,计算每个改正像素在畸变图像上的畸变坐标,实现图像的改正[5,6]。
为提高无人机航测成果的精度,减少畸变差,在进行空三之前对无人机影像进行畸变纠正是非常必要的。目前各种处理无人机影像数据的空三软件基本上都带有畸变纠正功能,图1是VirtuoZo AAT畸变差纠正模块,其功能主要包括消除像主点偏移和影像畸变,并按照航带排序要求使影像顺时针或逆时针旋转。
4 无人机空中三角测量作业流程
空中三角测量是摄影测量的关键步骤,它利用少量地面控制点将整个区域网连接成一个整体,通过区域网平差计算一个测区中所有影像的外方位元素和所有加密点的地面坐标[7],用于模型定向以及后续4D产品的生产。空中三角测量是摄影测量内业工作的核心,空三精度的高低直接影响到摄影测量的成图精度,甚至会导致内业成图无法进行。针对高山峡谷地区高落差、无人机影像数据姿态差的特点,高山峡谷地区无人机影像数据空中三角测量相对于普通地区而言,作业流程大体相同,虽然仅多了一步,即利用DiPatBRec软件使用PATB自检校功能解算的参数和PATB平差的结果对影像数据进行二次纠正,但效果比较明显。高山峡谷地区无人机影像空中三角测量具体作业流程如图2所示。
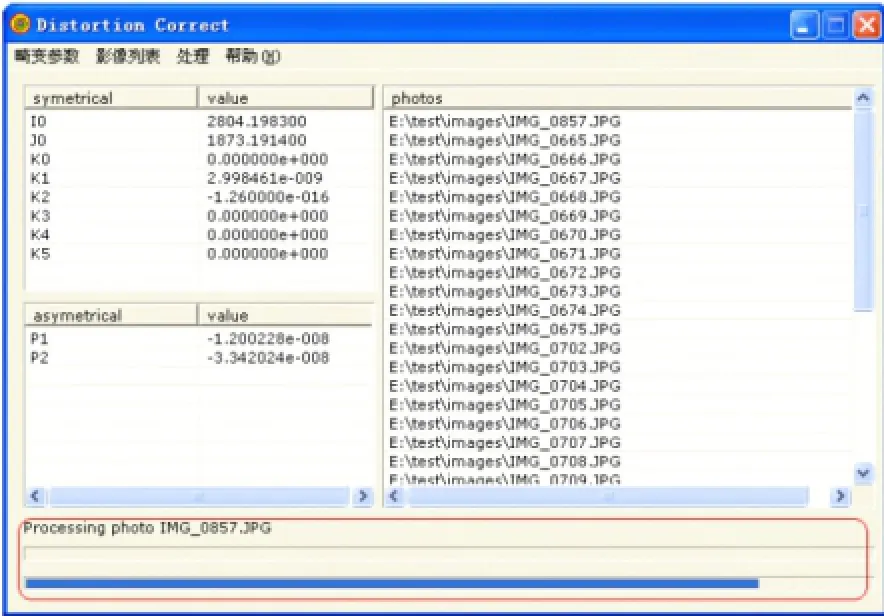
图1 影像的畸变差纠正Fig.1 The distortion correct of UAV images
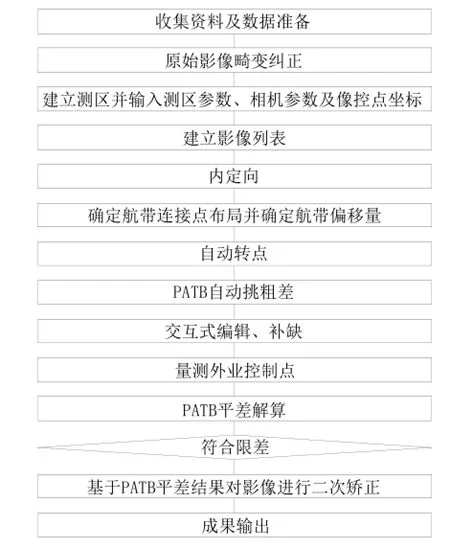
图2 高山峡谷地区无人机空中三角测量作业流程Fig.2 The workflow of AT based on UAV images in alpine gorge region
5 空三案例
5.1 测区资料概况
测区位于四川省和云南交界的白鹤滩水电站库区,搭载的相机为佳能5D MarkⅡ,采用35 mm的镜头。影像地面采样间隔0.2 m,航向重叠度75%,旁向重叠度为50%,共3条航线,97张影像,外业共量测了21个像控点,像控点的分布图见图3。
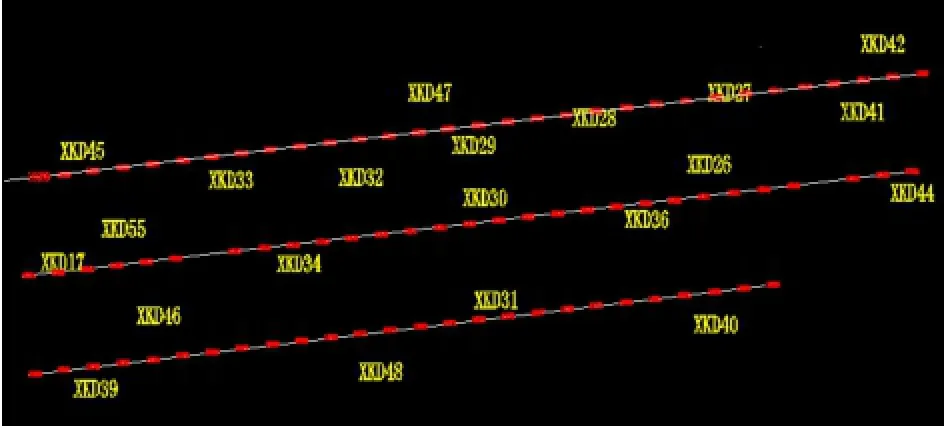
图3 测区像控点分布图Fig.3 The distribution of control points
5.2 空中三角测量
本测区采用全数字摄影测量系统PixelGrid(简称PG)自动空三加密模块。整个空中三角测量加密过程包括收集资料及数据准备,原始航片畸变纠正,建立测区并输入测区参数、相机参数及像控点坐标,建立影像列表,内定向,确定航带连接点布局并确定航带偏移量,自动转点,PATB平差模块自动挑粗差,交互式编辑、补缺,量测外业控制点,PATB平差结算,符合限差后即可获取空三加密成果。
为提高这种姿态比较差的高山峡谷地区无人机影像的空三加密成果精度,先是利用PATB平差模块的自检校功能获取自检校结果,然后利用DiPatBRec软件使用PATB自检校功能解算的参数和PATB平差的结果对影像数据进行二次纠正,PATB平差的匹配点越多,纠正效果也越好。利用DiPatBRec软件对无人机影像数据进行二次纠正,有助于提高无人机空三加密成果的精度。
5.3 成果精度分析
空三加密完成后,输出空三成果,具体精度如表1所示,均满足相关规范精度指标。将符合规范限差要求的PixelGrid工作站空三加密成果在Vir⁃tuoZo摄影测量工作站中恢复,重建测区,将内业立体测图工作转移到VirtuoZo测图系统完成。为更好地验证地形图精度,采用RTK结合全站仪在测区量测地物点的方式对地形图成果进行检查,外业共量测了35个地物点,其中点位平面中误差为±0.54 m,高程中误差为±0.61 m,均满足相应规范的要求。
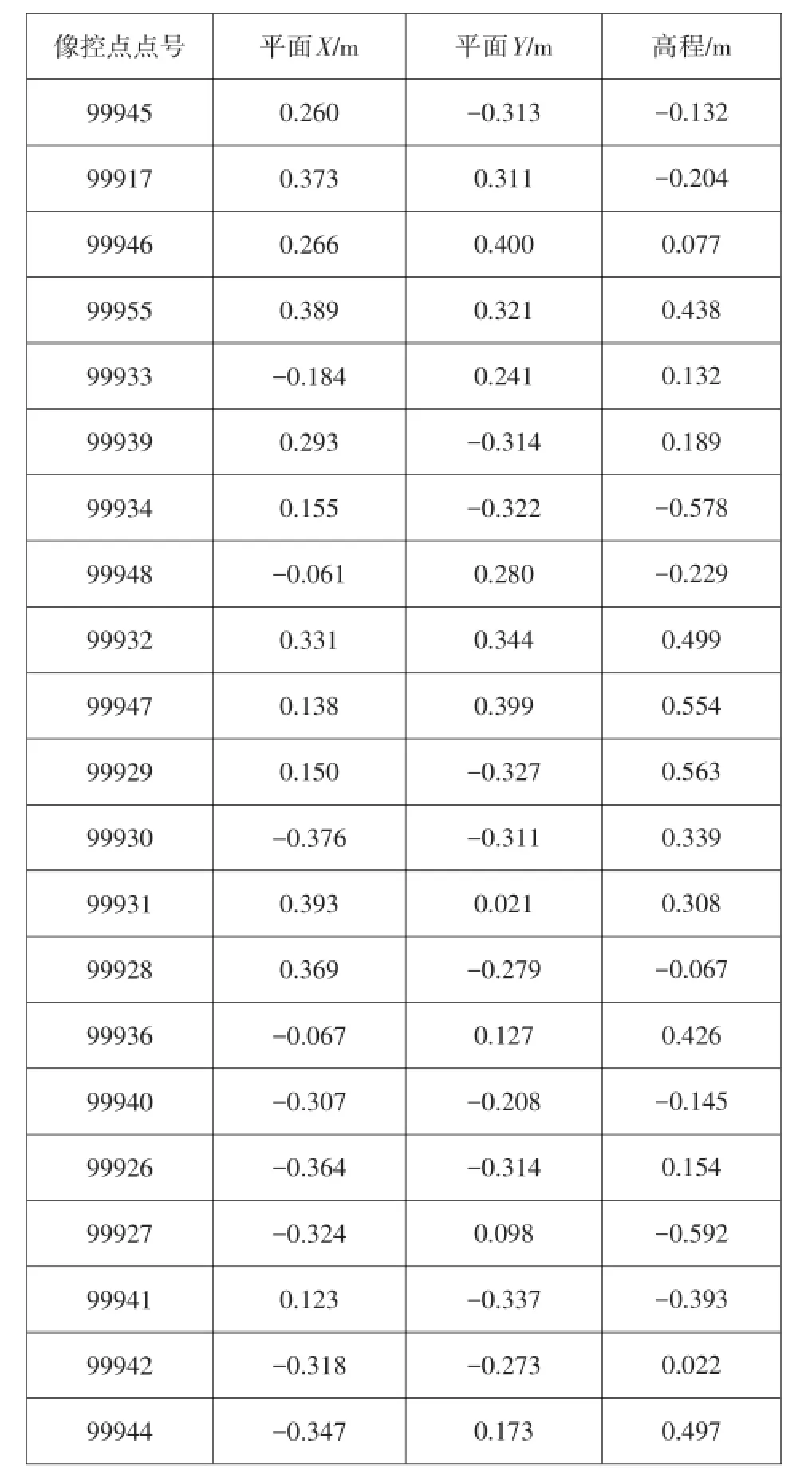
表1 空三加密精度情况表Table 1 The accuracy table of AT
6 结语
无人机航测技术是传统航空摄影测量手段的有力补充,具有灵活机动、高效快速、精细准确、作业成本低等特点,在高山峡谷的河流地区利用该技术能够快速、高效、低成本获取高分辨率影像,提供地形图和正射影像图等基础地理信息成果,有助于提高本单位测绘项目的三维水平。而空中三角测量作为摄影测量技术作业流程的关键步骤,其成果的精度直接影响着后续产品的质量。针对高山峡谷地区高差及无人机影像姿态较差的特点,本测区通过使用DiPatBRec软件,利用PATB自检校功能获取的参数和PATB平差结果对影像数据进行二次纠正来提高空三成果的精度,确保后续作业的顺利进行。综上所示,利用该方法能够很好地解决高山峡谷地区无人机影像空中三角测量中的遇到的难题,有助于无人机航测技术在高山峡谷地区的应用,从而为水电站的设计与建设贡献一份力量。■
[1]曹三明,夏兴华.民用航空法释义[M].沈阳:辽宁教育出版社,1996.
[2]刘先林.摄影测量与遥感技术的最新进程[R].郑州:信息工程大学测绘学院,2006.
[3]彭晓东,林宗坚.无人飞艇低空航测系统[J].测绘科学, 2009(4):11-14;20.
[4]张建霞,王留召,刘先林,等.数字航空摄影测量的相机检校[J].测绘通报,2005(11):41-42;62.
[5]金仲华,崔红霞.数字相机径向畸变差检测及改正[J].科技广场,2008(10):118-120.
[6]HEIKKILAJ,SILVENO.A Four2 step Camera Calibration Procedure with Implicit Image Correction[C].IEEE Comput⁃er Society Conferenceon Computer Visionand Pattern Rec⁃ognition(CVPR'97).SanJuan,PuertoRico:IEEE,1997:1106-1112.
[7]张祖勋.航空数码相机及其有关问题[J].测绘工程,2004 (4):1-5.
[8]张祖勋,张剑清.数字摄影测量学[M].武汉:武汉测绘科技大学出版社,1996.
向家坝水电站举行防汛应急演练
据中国长江三峡集团公司目前,向家坝水电站三期基坑及升船机船厢室段正在进行紧张施工和部件安装,随着2014年汛期日益临近,如何确保施工人员安全?遇到紧急情况时如何应对?5月20日上午9点整,一场超标准洪水应急演练在向家坝工地升船机下闸首高程296平台上演。
“防汛办公室收到三峡梯调中心水情报告,3天后向家坝洪峰流量将超过25 100 m3/s,情况十分危急。”随着水情预报中心负责人报告“险情”出现,超标准洪水应急演练正式开始。本次演练共包括以下环节:险情报告、应急领导小组下达命令、对三期横向围堰进行巡检、水电四局施工人员撤离、葛洲坝集团施工人员撤离、武汉船舶施工人员撤离、升船机下闸首检修闸门下闸(仅下一节)。现场计时,从报告险情出现到所有施工人员撤离总共用时38 min,撤离总人次为123人。全体人员撤离后,升船机下闸首检修门开始下闸;25 min后,首节门叶已放置到位,演练结束,全部用时63 min。
现场负责人解释说,在这次演练中只将一节检修门放置到位,而遇到真正洪水时,会将所有检修门下放。将升船机下闸首检修闸门下闸可以有效地阻挡洪水流往升船机船厢室,保护船厢设备安全度汛。检修门分为5节,每节门高6 m,宽14 m,在下闸过程中,门机将第一节门首先放入底部,随后将剩余的4节门依次叠加在第一节门上,最终将形成一扇30 m高的挡水门。每节门从起吊到安置到位用时约为25 min,加上空钩上升时间,5扇闸门全部安装到位需用3 h。
本次演练是在短时间内,将大批分布在各个施工点的人员依次撤离,有时间短、区域大的特点,现场秩序严谨、安排井然有条。
据了解,举行演练是为进一步提高施工和管理人员应急处理能力,向家坝工程建设部与在升船机各部位施工的单位联合组织了此次应急演练。模拟遭遇重现期50年洪水时,各相关单位如何临阵不乱、有序配合,确保在施工现场发生险情时,组织有关人员迅速、安全撤离危险区域。
This paper introduces the principle of the common camera calibration and the distortion cor⁃rect of UAV images.Then it introduces the workflow of AT based on UAV images in alpine gorge region. Finally,with specific example,it discusses the technology of AT based on UAV images in alpine gorge region.
UAV;photogrammetry;AT
P217
A
1671-1092(2014)03-0027-04
2014-05-07
吴 磊(1985-),男,安徽涡阳县人,硕士研究生,工程师,现主要从事摄影测量与遥感工作。
Title:Study on AT based on UAV images in alpine gorge region//by WU Lei,ZHAO Xing-ying and CHEN Guang//Zhejiang East China Hydropower Surveying&Mapping Co.,Ltd.
猜你喜欢
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
测绘通报(2019年4期)2019-05-10 08:16:20
测控技术(2018年10期)2018-11-25 09:35:40
企业科技与发展(2018年5期)2018-09-10 00:20:39
中小企业管理与科技·下旬刊(2017年7期)2017-08-24 02:13:53
传媒评论(2017年2期)2017-06-01 12:10:16
传媒评论(2017年2期)2017-06-01 12:10:16
测绘科学与工程(2017年5期)2017-05-07 06:30:45
